

X() – то же в новом установившемся состоянии;
 y – величина вносимого
возмущения на входе, % хода РО.
y – величина вносимого
возмущения на входе, % хода РО.
Запаздывание. Проведём в точке С максимальной скорости изменения выходной величины касательную АВ к кривой разгона и продолжим её до пересечения с линией начального установившегося значения выходной величины (точка А). Если значение характеристики в точке перегиба С достаточно мало (xС/x<0,05…0,1), то отрезок ОА на оси времени от момента внесения возмущения до точки пересечения с касательной определит общее суммарное запазды-вание объекта о. Такое определение приводит, вообще говоря, к занижению расчётного времени запаздывания и завышению постоянной времени, т.е. создаёт более благоприятное впечат-ление о динамических свойствах объекта, чем это имеет место на самом деле.
Постоянная времени. Постоянная времени – это условное время изменения выходной величины от начального до нового установившегося значения, если бы это изменение происходило со скоростью, постоянной и максимальной в данном переходном процессе.
Для объекта первого порядка, кривая разгона которого представляет собой экспоненту, постоянную времени То можно определить с помощью касательной к любой точке кривой разгона.
Постоянную времени многоёмкостного объекта при тех же предположениях относительно величины xС определяют по построению на рис. 1.
Оценка динамических свойств линейных объектов лишь постоянной времени То и запаздыванием о объясняется тем, что обычно такие объекты можно с достаточной степенью точности аппроксимировать двумя последовательно включёнными элементарными звеньями – звеном с чистым запаздыванием ч = о и звеном первого порядка с постоянной времени Т = То.
Е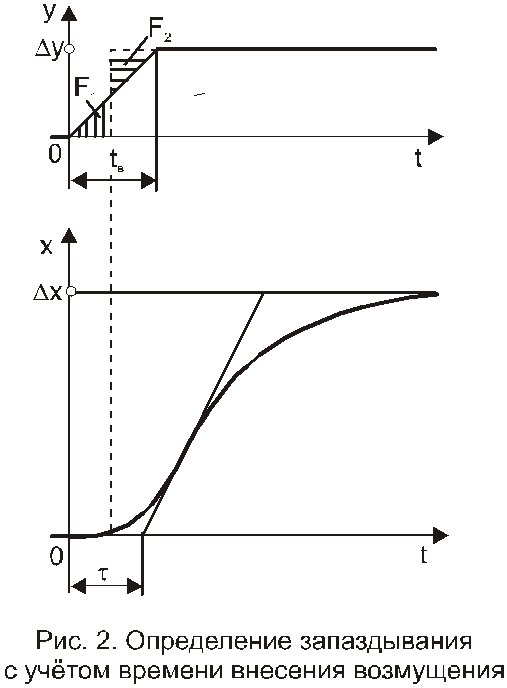 сли
запаздывание объек-та соизмеримо со
временем нарастания возмущения tв,
то при определении величины о
следует заменить истинное возмущение
типовым скачко-образным. На рис. 2 показан
наиболее распространённый случай,
когда возмущение y нарастает
по линейному закону. Момент внесения
скачко-образного возмущения условно
выбирают так, чтобы площади F1
и F2
были равны, а запаздывание объекта о
вычисляют по выражению
сли
запаздывание объек-та соизмеримо со
временем нарастания возмущения tв,
то при определении величины о
следует заменить истинное возмущение
типовым скачко-образным. На рис. 2 показан
наиболее распространённый случай,
когда возмущение y нарастает
по линейному закону. Момент внесения
скачко-образного возмущения условно
выбирают так, чтобы площади F1
и F2
были равны, а запаздывание объекта о
вычисляют по выражению
![]()
2. Лабораторная установка
Лабораторная установка состоит из щита, на котором смонтирована САУ с регулирующим устройством, работающим по закону интегрального регулирования.
Объектом регулирования САУ является электрический нагреватель с автоматическим потенциометром КСП-3 и термо-парой, измеряющей температуру нагревателя. Таким образом, постоянная времени потенциометра и термопары входят как составная часть в постоянную времени объекта. Нагреватель получает питание от регулируемого электронного источника питания, в динамическом отношении представляющего собой пропорциональное звено.
Управляющий вход объекта – вал переменного резистора схемы источника питания, регулирующего напряжение на нагревателе – соединён с выходным валом исполнительного механизма. Этот источник питания исполняет функци регулирующего органа. В САУ применён исполнительный механизм с пропорциональной скоростью перемещения, снабжённый двигателем постоянного тока с независимым возбуждением.
Скорость двигателя измеряется тахогенератором постоянного тока независимого возбуждения. Напряжение тахогенератора в качестве сигнала обратной связи подаётся на вход электронного усилителя последовательно с сигналом измерителя рассогласования. Глубину обратной связи можно менять изменением напряжения, снимаемого с тахогенератора. Так как канал обратной связи является дифференцирующим, а передаточная функция прямого канала регулятора благодаря электронному усилителю с коэффициентом усиления порядка 1000 имеет большой модуль и обратной величиной этой функции можно пренебречь, в регуляторе реализуется закон И-регулирования.
На коэффициент передачи измерителя рассогласования, можно влиять изменением напряжения питания измерителя рассогласования.
Нагрузкой нагревателя служит поток воздуха, обтекающий нагреватель. Возмущение создаётся изменением потока воздуха от вентилятора, обдувающего нагреватель. Величина нагрузки может изменяться ступенчато. Этим ступеням соответствуют три положения переключателя “Нагрузка”, условно названные “М” (малая нагрузка),”Н” (номинальная) и “Б” (большая).
Ф ункционально-принципиальная
схема САУ и размещение элементов САУ
на щите управления приведены на рис. 3
и 4.
ункционально-принципиальная
схема САУ и размещение элементов САУ
на щите управления приведены на рис. 3
и 4.
Rз – потенциометр «Задание» (в корпусе КСП-3, на передней панели);
Rд – потенциометр датчика температуры (реохорд КСП-3);
Rк.у – потенциометр «Коэффициент усиления» (на щите);
ИМ – исполнительный механизм; ТГ – тахогенератор постоянного тока;
ПУ – переключатель управления «Автоматическое» – «Ручное»;
КУ – ключ дистанционного управления «Больше» – «Меньше»;
ДУП – дистанционный указатель положения выходного вала исполнительного механизма; Н – нагреватель; ТП термопара;
Uп – регулируемый источник питания измерителя рассогласования

-
Программа работы и её выполнение
1) В режиме «Ручное» получить статические характеристики объекта управления по каналу управления во всём диапазоне изменения температуры объекта и при одной из трёх нагрузок по заданию преподавателя.
Величину входного воздействия – положение вала ИМ – отсчитывают в процентах по шкале дистанционного указателя положения вала ДУП, выходную величину отсчитывают по шкале КСП-3 в единицах измерения температуры. Коэффициент передачи объекта регулирования является при этом величиной, имеющей размерность.
Для получения статической характеристики вначале в режиме управления «Ручное» устанавливают вал исполнительного механизма в исходное положение, чему соответствует 0% по шкале дистанционного указателя положения ДУП, и дожидаются окончания переходного процесса остывания нагревателя. Об окончании переходного процесса можно судить по прекращению перемещения стрелки КСП-3. Затем ступенчато в том же режиме управления «Ручное» через 5, 10 или 20% (в зависимости от величины нагрузки) перемещают вал исполнительного механизма и производят отсчёты температуры по шкале КСП-3 по окончании переходных процессов нагрева. Вместо отсчётов температуры по шкале прибора можно произвести запись переходных процессов на диаграмму, по которой и произвести отсчёты.
По полученным данным теперь следует вычислить коэффициент передачи объекта kоб по каналу управления и построить график в координатах «положение ИМ – kоб».
2) Записать на диаграмме КСП–3 в криволинейных полярных координатах и на её основе построить в прямоугольных координатах временную характеристику объекта управления. Предполагая, что объект есть последовательное соединение запаздывающего звена с временем запаздывания об и апериодического звена первого порядка с постоянной времени Tоб, определить об и Tоб.
Для этого в режиме управления «Ручное» устанавливают выходной вал исполнительного механизма по показаниям ДУП в положение, соответствующее номинальному режиму работы объекта. В данной лабораторной установке этому соответствует примерно середина полученной статической характеристики. После установки исполнительного механизма в это положение дожидаются окончания переходного процесса. Затем перемещают вал исполнительного механизма в сторону увеличения на такую величину, чтобы температура объекта достигла примерно 4/5 максимального значения, и производят запись переходного процесса. При этом непременно надо отметить на диаграмме момент внесения возмущения карандашом или качнув перо КСП-3, в противном случае будет невозможно установить начало отсчёта запаздывания 0.
Величина требуемого перемещения исполнительного механизма зависит от нагрузки и может быть определена по полученной статической характеристике.
Опыт повторяют, перемещая вал исполнительного механизма в сторону уменьшения от среднего положения на такую величину, чтобы температура объекта снизилась до примерно 1/4 максимальной величины.
Постоянную времени объекта Тоб и запаздывание об получают тщательным построением на графике достаточного размера согласно рис. 1.
3) Разработать и вычертить таблицу, в которую занести условия поставленных экспериментов и полученные результаты по определению точек статической характеристики объекта и его динамических параметров. Сделать выводы по работе, отразив в них форму статической характеристики объекта и соотношение между о и То, отражающее близость реального объекта к объекту первого порядка.
Оформление отчёта
Отчёт должен содержать:
основные теоретические сведения с иллюстративным материалом;
полученные в опытах статические и динамические характеристики объекта управления, необходимые графические построения;
диаграммы, записанные на КСП-3, с их разметкой и отметками об условиях опытов;
описание поставленных опытов с указанием выбранных исходных точек и основаниями для их выбора;
таблицы опытных и рассчитанных данных;
анализ результатов и выводы по этапам работы и по работе в целом.
Контрольные вопросы
1. Что такое статическая характеристика объекта?
2. Что такое коэффициент передачи объекта и как его определить в опыте на реальном объекте?
3. В каких единицах измеряется коэффициент передачи объекта?
4. Что такое кривая разгона объекта?
5. Какой вид имеет кривая разгона объекта первого порядка?
6. Что такое постоянная времени объекта?
7. В какой точке кривой разгона одноёмкостного объекта какие надо произвести геометрические построения, чтобы определить его постоянную времени?
8. В какой точке опытной кривой разгона многоёмкостного объекта надо провести касательную к ней, чтобы определить постоянную времени объекта и величину запаздывания?
9. В какой точке статической характеристики надо ставить опыт, чтобы определить кривую разгона?