

2.2. Расчет параметров пид-регулятора
ПИД-Регулятор выберем тем же способом, что и ПИ-регулятор:
 , тогда ПФ
регулятора выглядит следующим образом:
, тогда ПФ
регулятора выглядит следующим образом:
Смоделировав систему с данным регулятором, построим реакцию на единично-ступенчатое воздействие (рис.10), ЛАЧХ и ЛФЧХ разомкнутой системы (рис. 9).
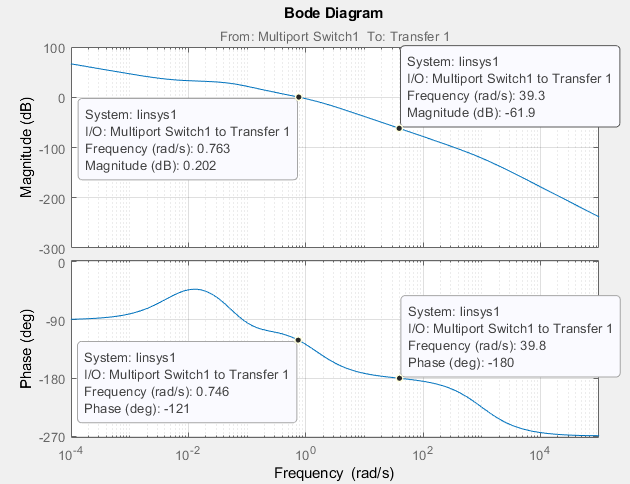
Рисунок 9 – ЛАЧХ и ЛФЧХ разомкнутой системы с регулятором
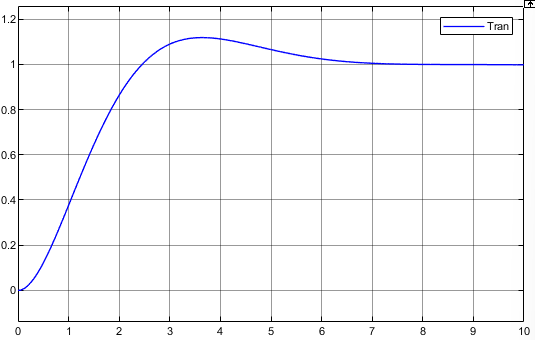
Рисунок 10 – Реакция на ступенчатое воздействие системы с регулятором
Используя эти графики вычислим характеристики качества:
Время
переходного процесса:

Перерегулирование:
Запас
устойчивости по амплитуде:

Запас
устойчивости по фазе:

Частота
среза:

Установившаяся ошибка:
Показатели качества были еще сильнее улучшены, так время регулирования по сравнению с ПИ-регулятором улучшилось на 2300%, остальные характеристики также были значительно улучшены. Т.к. ПИД-регулятор показал себя наилучшим образом, в дальнейшем будем использовать его.
3. Компьютерное моделирование линейной су
3.1. Создание модели линейной системы управления
На данном этапе работы была разработана система, компьютерная модель, позволяющая переключаться между дальнейшими пунктами работы. В данный момент будет использоваться модель с различными задающими воздействиями и с линейным элементом вместо нелинейного. Модель системы разработана с ПО Simulink и представлена на рисунке 11.
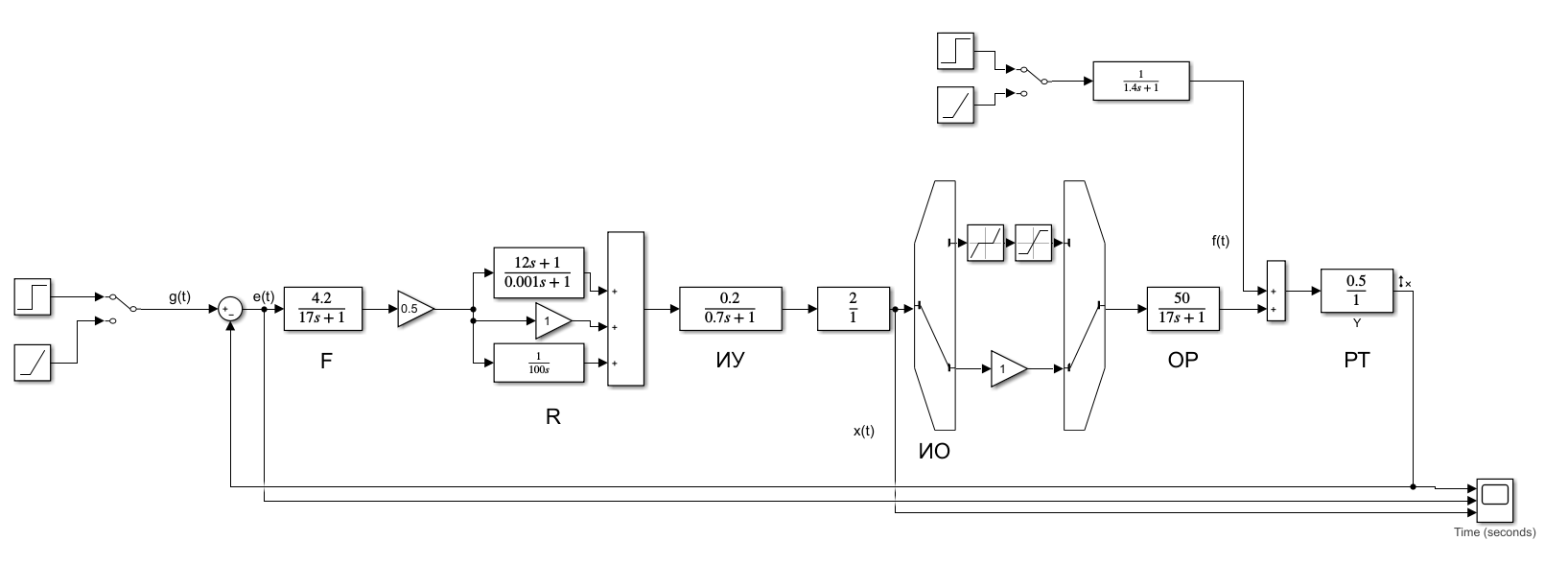
Рисунок 11 – Компьютерная модель системы.
3.2. Реакция модели на различные задающие воздействия
Графики переходных процессов e(t) (оранжевый), у(t) (синий), х(t) (зеленый) при ступенчатом воздействии представлены на рисунке 12.
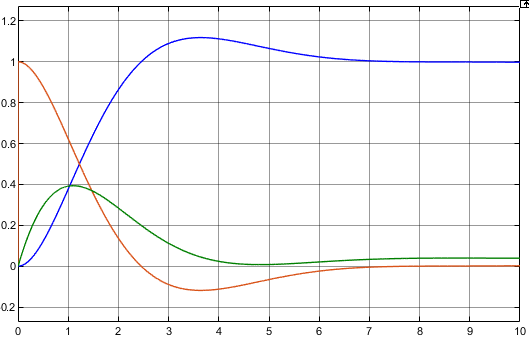
Рисунок 12 – Графики переходных процессов e(t), у(t), х(t) при ступенчатом воздействии
Выпишем максимальные уровни и установившиеся уровни интересующих нас сигналов:
Выходной
сигнал:

Ошибки:

На входе
НЭ (в линейной модели Управляющее
воздействие):

Графики переходных процессов e(t) (оранжевый), у(t) (синий), х(t) (зеленый) при линейно увеличивающемся воздействии представлены на рисунке 13.
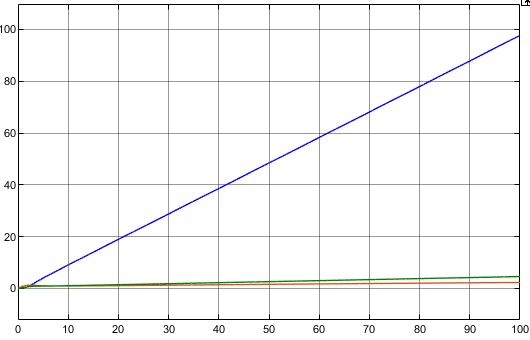
Рисунок 13 – Графики переходных процессов e(t), у(t), х(t) при линейно увеличивающемся воздействии
Выпишем максимальные уровни и установившиеся уровни интересующих нас сигналов:
Выходной
сигнал:

Ошибки:

На входе
НЭ (в линейной модели Управляющее
воздействие):

3.3. Оптимизация параметров пид-регулятора
Используя компьютерное моделирование, не удалось оптимизировать параметры ПИД-регулятора так, чтобы улучшить характеристики качества. Это связанно с ограниченным диапазоном параметров регулятора. Если снять это ограничение то, воспользовавшись утилитой PID Tuner, были получены следующие результаты:

Рисунок 14 – Параметры ПИД-Регулятора и характеристики качества системы.
Однако, т.к. были четко ограничены диапазоны регуляторов, то использовать его не представляется возможным. Далее будет использоваться регулятор рассчитанный ранее.
3.4. Анализ чувствительности системы
Анализ проводим при увеличении и уменьшении Т0 и k0 на 20 и 50 %. Показатели качества при изменении параметров приведены в таблице 3.
Таблица 3.
Изменение, % |
Параметр |
Значение |
Время регулирования tр, c |
Перерегулирование σ, % |
Исходные |
Т0 |
17 |
6.5 |
11 |
k0 |
50 |
|||
-20 |
Т0 |
13.6 |
6 |
16 |
k0 |
40 |
7 |
8 |
|
+20 |
Т0 |
20.4 |
9 |
10 |
k0 |
60 |
5.5 |
18 |
|
-50 |
Т0 |
8.5 |
7 |
20 |
k0 |
25 |
11 |
5 |
|
+50 |
Т0 |
25.5 |
12 |
9 |
k0 |
75 |
4 |
19 |
Изменение параметров сильно влияет на систему, однако перерегулирование не поднимается выше 20 %, а время регулирования вышел 12.