

МИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ,
СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕЛЕКОММУНИКАЦИЙ ИМ. ПРОФ. М.А. БОНЧ-БРУЕВИЧА»
(СПБГУТ)
_________________________________________________________________________
Кафедра радиосистем и обработки сигналов (РОС)
Лабораторная работа №2
ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СНОСА
Выполнил
студент группы РТ-01
Проверил: Поддубный С.С.
____________________
ЦЕЛЬ РАБОТЫ: изучение принципов построения, основных тактико-технических характеристик и методики экспериментальных исследований допплеровских измерителей скорости и угла сноса (ДИСС) .
Методические указания по подготовке к работе
Перед выполнением лабораторной работы студенты должны получить зачёт по коллоквиуму. При подготовке к коллоквиуму необходимо изучить принципы построения ДИСС, ознакомиться с составом аппаратуры лабораторной установки и задачами экспериментальных исследований.
Описание лабораторной установки
Лабораторная установка включает действующий комплект аппаратуры ДИСС, имитатор сигналов и помех (два генератора стандартных сигналов в диапазоне допплеровских частот и генератор шума), измеритель частоты и осциллограф.
Назначение ДИСС
Для решения различных задач навигации летательных аппаратов (ЛА) необходимо знать величину и направление вектора скорости относительно поверхности Земли (или иной планеты). Зная скорость и направление движения, можно управлять полётом ЛА. Кроме того, путём интегрирования составляющих вектора скорости в заданной системе координат можно определить текущие координаты ЛА.
Для определения вектора скорости ЛА широко применяется радиоаппаратура, использующая эффект Допплера. Наиболее часто допплеровские устройства применяются в автономных самолётных системах навигации, обеспечивающих полёт самолёта по заданному маршруту. Обычно такой полёт происходит на постоянной высоте, при этом вертикальная составляющая скорости равна нулю. В этом случае необходимо определять только две составляющие вектора скорости в горизонтальной плоскости или величину горизонтальной скорости и угол сноса. Отсюда и название – допплеровский измеритель скорости и угла сноса (ДИСС).
В настоящее время ДИСС применяются для решения широкого круга задач. Условно их делят на два типа – самолётные и вертолётные. Вертолётные ДИСС, в отличие от самолётных, определяют полный вектор скорости ЛА, т.е. дополнительно к горизонтальным определяют ещё и вертикальную составляющую вектора скорости.
Указанное деление ДИСС является условным. К примеру, ДИСС самолётного типа используются на экранопланах и судах на воздушной подушке, а «вертолётные» – в системах мягкой посадки космических аппаратов на Луну и Марс. В дальнейшем будем рассматривать самолётные ДИСС.
Введём некоторые понятия, связанные с решением задач навигации при движении самолёта по маршруту (рис. 1).
Линия пути – это проекция траектории ЛА на земную поверхность;
Wп - вектор путевой скорости (горизонтальная составляющая полного вектора скорости ЛА относительно земной поверхности). Путевой скоростью можно назвать также скорость перемещения проекции центра тяжести ЛА вдоль линии пути;
Vг - горизонтальная составляющая вектора воздушной скорости ЛА (относительно масс воздуха);
Uг - горизонтальная составляющая вектора скорости ветра;
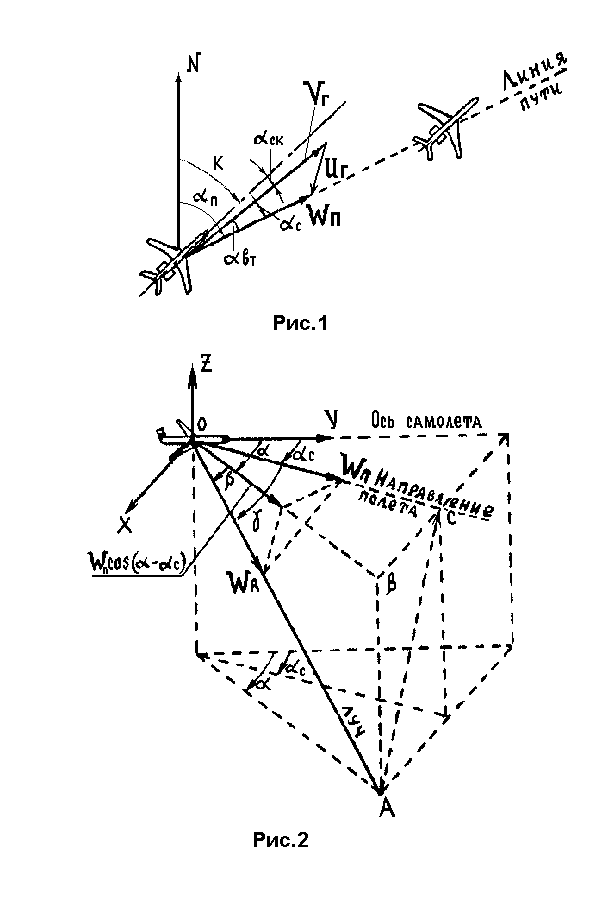
с - угол сноса – угол в горизонтальной плоскости между проекцией продольной оси самолёта и вектором путевой скорости;
K - курс самолёта – угол в горизонтальной плоскости между северным направлением меридиана и проекцией продольной оси самолёта;
п - путевой угол – измеряется в горизонтальной плоскости между направлением на север и направлением вектора путевой скорости;
ск – угол аэродинамического скольжения – между горизонтальной проекцией продольной оси самолета и вектором Vг;
ВТ – угол сноса ветром – между векторами Vг и Wп.
Положительные направления перечисленных углов – по часовой стрелке.
При полёте самолёта направление движения обычно не совпадает с направлением продольной оси, т.е. путевой угол не равен курсу, и самолёт перемещается в заданном направлении «боком» (рис. 1). Происходит это вследствие двух причин – сноса самолёта ветром и аэродинамического скольжения (проскальзывания самолёта в боковом направлении при крене и в других случаях). В соответствии с этим угол сноса равен
с = ск + ВТ
Ддя тяжёлых скоростных самолётов при полёте по маршруту ск 0 и может не учитываться, тогда с ВТ. Вектор путевой скорости определяется суммой векторов воздушной скорости и скорости ветра
Wп = Vг + Uг
Три этих вектора образуют так называемый треугольник скоростей. Самолётный ДИСС определяет угол сноса с и путевую скорость Wп. Для определения путевого угла необходимо знать также курс K самолёта, поскольку
п = K +с
При помощи магнитного компаса измеряют магнитный курс Км. Для перехода к истинному курсу K необходимо внести поправку на магнитное склонение в данной местности
К = Км + м .
Км измеряется по часовой стрелке между северным направлением магнитного меридиана и горизонтальной проекцией продольной оси самолета; м – угол между истинным и магнитным меридианами.
ДИСС и курсовая система, определяющая курс, являются основными датчиками для автономного навигационного устройства самолёта (АНУ). АНУ представляет собой счётно-решающую аппаратуру, которая определяет пройденное расстояние и текущие координаты самолёта. Во время полёта ЛА из-за воздействия дестабилизирующих факторов (например, изменения силы ветра), а также вследствие пилотирования, значения K, с и Wп непрерывно изменяются во времени. В АНУ определяются две составляющие вектора путевой скорости в прямоугольной системе координат, у которой ось У направлена на север, а ось Х – на восток

Текущие координаты находят путём интегрирования составляющих вектора скорости
 ,
,
где X0, Y0 координаты в момент t0, например, в точке старта.
Пройденное расстояние определяют в результате интегрирования путевой скорости
 ,
,
До разработки ДИСС приборов для измерения угла сноса не существовало: он измерялся штурманом косвенным путём с большими погрешностями. В последнее время разработаны также корреляционные измерители путевой скорости и угла сноса, которые успешно конкурируют с ДИСС.
Частота Допплера при горизонтальном полёте
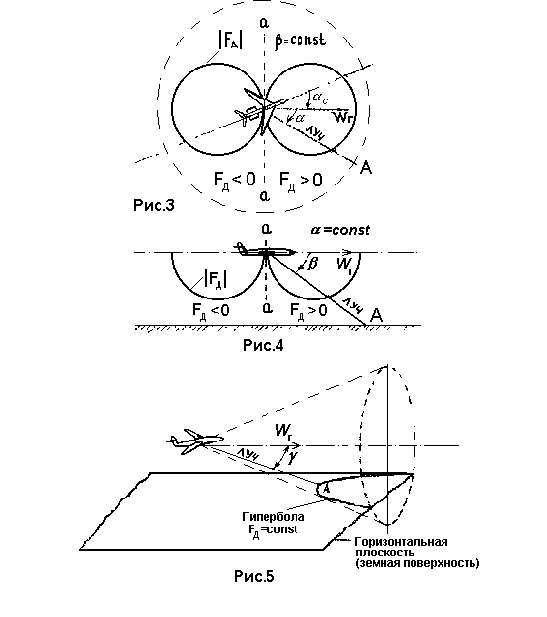
Будем рассматривать горизонтальный полёт и для простоты считать луч антенны бесконечно узким, направленным в точку А земной поверхности (рис. 2). Найдём зависимость частоты от направления луча. Для этого введём прямоугольную систему координат, связанную с самолётом (ось У совпадает с продольной осью самолёта, ось X направлена вверх, плоскость Х0У совпадает с горизонтальной плоскостью при полёте).
Обозначим - угол поворота антенны (луча) в плоскости Х0У, отсчитываемый от оси У; - угол наклона луча относительно плоскости Х0У; - угол между вектором Wп и направлением луча 0А (в наклонной плоскости).
При отражении сигнала от точки А частота Допплера на входе приёмника ДИСС определяется, как известно, радиальной скоростью самолёта относительно А (скоростью изменения расстояния между самолётом и точкой А)

где WR – значение радиальной скорости; - длина волны ДИСС.
Частота Допплера положительна, если самолёт приближается к точке А, и отрицательна, если удаляется.
Радиальную скорость можно найти, если спроектировать вектор полной скорости самолёта относительно Земли W на направление луча 0А (в плоскости 0АС). Учитывая, что при горизонтальном полёте W = Wп , получим WR = Wпcos. Можно также спроектировать Wп на 0А в два этапа; вначале в плоскости Х0У на направление 0В (угол -с), а затем – в плоскости 0АВ (угол )
 (1)
(1)
Тогда
получим

 (2)
(2)
На
рис. 3 и 4 приведены диаграммы FДпри
изменении углов
и
в полярной системе координат. FД
максимальна, когда луч совпадает с WП,
и FД
= 0 при повороте луча на 90о
по отношению к WП
.
Наглядное представление о допплеровской частоте при различных положениях луча можно получить, построив для фиксированного момента времени линии равных допплеровских частот на земной поверхности.
И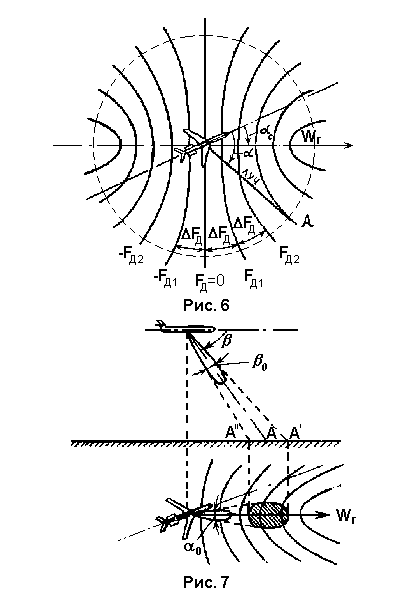 з
формулы (2) следует, что FД
= const
при
= const.
Поэтому, полагая
постоянным, будем мысленно вращать луч
вокруг вектора WП
.
При таком вращении луч образует
поверхность конуса, ось которого
совпадает с WП
(рис. 5). На земной поверхности он прочертит
некоторую кривую равных допплеровских
частот. Эта кривая будет являться
гиперболой, поскольку она образуется
как линия пересечения конуса и плоскости
(горизонтальной), параллельной оси
конуса. Полученную гиперболу называют
изодопплеровской, так как она проходит
через точки земной поверхности, которым
соответствует постоянная частота
Допплера при отражении сигналов. При
новом
луч прочертит еще одну гиперболу, которой
будет соответствовать новое значение
FД,
и т.д.
з
формулы (2) следует, что FД
= const
при
= const.
Поэтому, полагая
постоянным, будем мысленно вращать луч
вокруг вектора WП
.
При таком вращении луч образует
поверхность конуса, ось которого
совпадает с WП
(рис. 5). На земной поверхности он прочертит
некоторую кривую равных допплеровских
частот. Эта кривая будет являться
гиперболой, поскольку она образуется
как линия пересечения конуса и плоскости
(горизонтальной), параллельной оси
конуса. Полученную гиперболу называют
изодопплеровской, так как она проходит
через точки земной поверхности, которым
соответствует постоянная частота
Допплера при отражении сигналов. При
новом
луч прочертит еще одну гиперболу, которой
будет соответствовать новое значение
FД,
и т.д.
На рис. 6 изображена сетка изодопплеровских гипербол. По этой сетке можно непосредственно определить FД при получении отражённых сигналов от любой точки на земной поверхности. Проекция вектора WП на земную поверхность является осью симметрии всех гипербол и определяет положение сетки гипербол. Прямая FД = 0 является вырожденной гиперболой и соответствует = 90°. Гиперболы, расположенные симметрично относительно этой прямой, имеют допплеровские частоты, равные по величине, но противоположные по знаку.
В заключение заметим, что при негоризонтальном полёте, когда W WП , конус, осью которого всегда является W, займёт иное положение в пространстве. В этом случае изодопплеровскими линиями будут другие кривые второго порядка в зависимости от направления W – окружности, эллипсы или параболы.