

5. Расчет погрешностей
В данном разделе рассчитываются погрешности следящего измерителя угла ; погрешности, вызываемые угловым шумом, и аппаратурные погрешности, а также полная погрешность угломерного канала.
Погрешности следящего измерителя.
В соответствии с заданием точность
следящего измерителя угла
характеризуется средней квадратической
погрешностью
 .
.
Значение погрешности
определяется как на дальности пуска
бортового оружия
 ,
так и на максимальной дальности
при оптимизации следящего угломера для
дальностей
,
так и на максимальной дальности
при оптимизации следящего угломера для
дальностей
 и
и
 .На
основании расчета выбирается тот вариант
оптимизации и соответствующая ему
полоса пропускания следящего измерителя
.На
основании расчета выбирается тот вариант
оптимизации и соответствующая ему
полоса пропускания следящего измерителя
 ,
при которой достигается максимальная
точность на заданной дальности.
,
при которой достигается максимальная
точность на заданной дальности.
Критерием оптимальности измерителя
является минимум суммы дисперсий
флуктуационной и динамической
погрешностей. Оптимальная полоса
 пропускания следящего измерителя
определяется из табл.1 с учетом того,
что рассматриваемый измеритель имеет
обычно астатизм 1 порядка. Входящая в
приведенные в табл. 1 формулы величина
пропускания следящего измерителя
определяется из табл.1 с учетом того,
что рассматриваемый измеритель имеет
обычно астатизм 1 порядка. Входящая в
приведенные в табл. 1 формулы величина
 представляет собой эквивалентную
спектральную плотность флуктуаций (на
нулевой частоте) на выходе фазового
детектора (ФД), вызванных шумом, действующим
на входе ФД. Величина
имеет размерность град2/Гц и в
предположении равномерности спектра
флуктуаций в пределах полосы пропускания
следящего измерителя рассчитывается
по формуле
представляет собой эквивалентную
спектральную плотность флуктуаций (на
нулевой частоте) на выходе фазового
детектора (ФД), вызванных шумом, действующим
на входе ФД. Величина
имеет размерность град2/Гц и в
предположении равномерности спектра
флуктуаций в пределах полосы пропускания
следящего измерителя рассчитывается
по формуле

где П - пеленгационная чувствительность; -период повторения импульсов, a - отношение мощностей сигнала и шума на выходе тракта усиления суммарного сигнала.
Пеленгационная чувствительность П имеет размерность град-1, и в амплитудном суммарно-разностном радиопеленгаторе равна

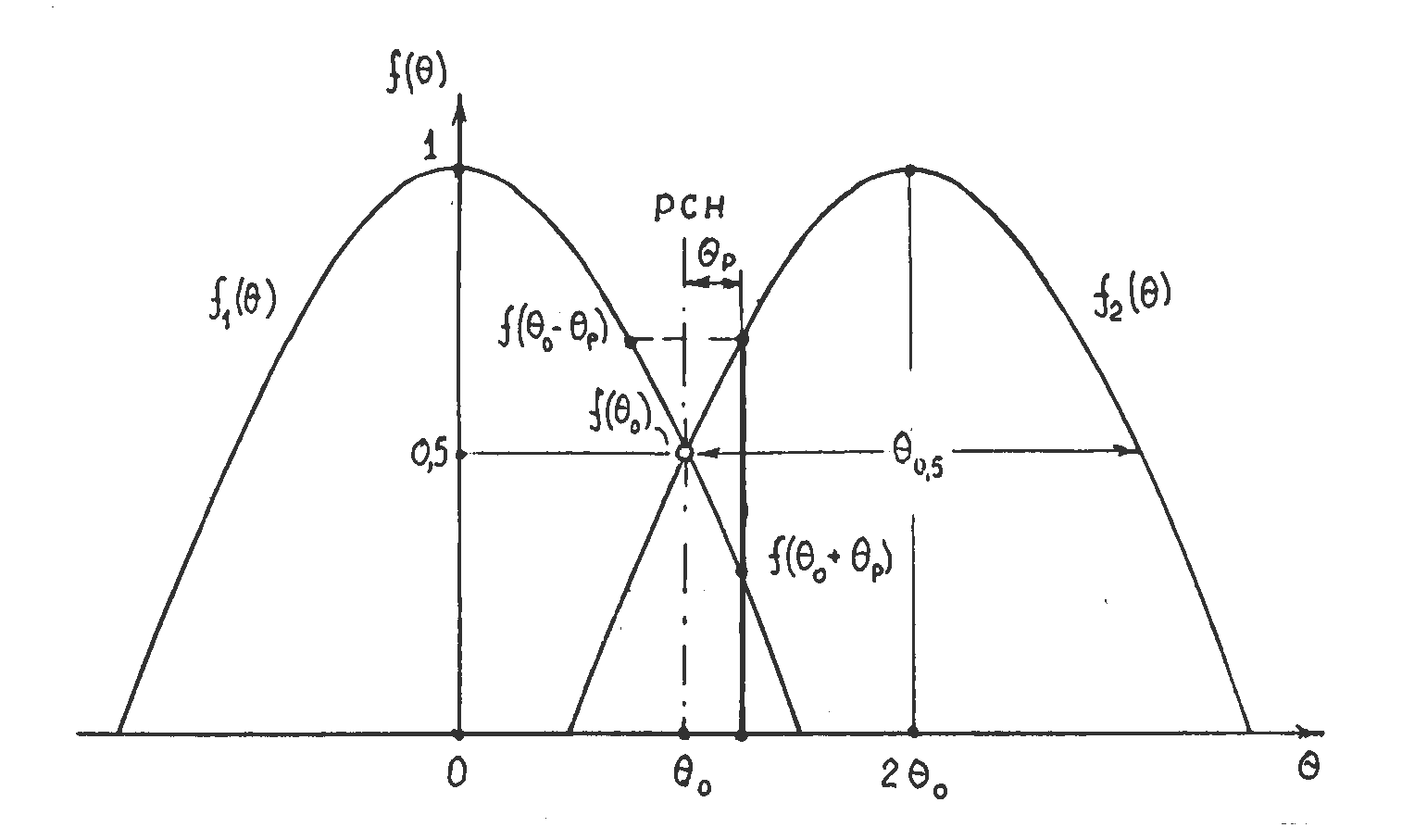
Рис. 5
Во
избежание ошибок при расчете П
целесообразно перенести начало координат
на рис. 2 в точку, соответствующую
максимуму диаграммы
,
как показано на рис. 5. Тогда
 ,
,
 и
и


Величина 1/П выполняет функцию масштабного
коэффициента. Включение этой величины
в отображает тот факт, что проникающий
на выход ФД шум воспринимается следящей
за углом
системой как случайное изменение угла
и является источником флуктуационной
погрешности
 пеленгатора.
пеленгатора.
Погрешности угломерного канала рекомендуется выражать в угловых секундах (1 угл.с=1/3600 градуса). Поэтому значение можно выражать в (угл.с)2/Гц и рассчитать следующим образом

Таблица 1.1
СА |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|









СА в таблице означает степень астатизма следящего угломера
Обозначения и соответствуют операторному коэффициенту передачи фильтра в цепи слежения за углом и оптимальной полосе пропускания следящего измерителя


Степень астатизма рассматриваемого угломера 1 порядка.
В формулы табл. 1.1 входит угловая скорость
цели
 .
Для нахождения значения
следует воспользоваться соотношением
(1.2). При этом значения
рассчитываются для всех дальностей, в
пределах от
.
Для нахождения значения
следует воспользоваться соотношением
(1.2). При этом значения
рассчитываются для всех дальностей, в
пределах от
 до
,
участвующих в последующих расчетах.
Рекомендуется принимать
=
3 км.
до
,
участвующих в последующих расчетах.
Рекомендуется принимать
=
3 км.
Вычисление погрешностей рекомендуется проводить по методике, изложенной в подразделе "Порядок расчета" § 1.6 данного пособия, используя схему "алгоритма" расчета, показанную на рис.1.9. Ниже приведены особенности расчета в проектируемом пеленгаторе.




Результаты расчета.
Таблица 1
N |
|
|
|
|
|
|
|
|
|
1 |
|
|
1.57078 |
110.116 |
431.364 |
0.235 |
14.235 |
11.18 |
25 |
2 |
|
1.57077 |
44.047 |
539.205 |
0.235 |
15.916 |
7.118 |
17.435 |
|
3 |
|
|
1.57077 |
44.047 |
539.205 |
0.225 |
15.564 |
7.782 |
17.401 |
4 |
|
1.57078 |
110.116 |
431.364 |
0.225 |
13.921 |
7.782 |
15.949 |







Рис. 6
Рис. 6 представляет собой график, на
котором представляются зависимости
от относительной дальности
 ,
одна из которых соответствует
,
одна из которых соответствует
 ,
а другая -
,
а другая -
 ,
т.е. оптимизации измерителя для дальностей
или
соответственно.
,
т.е. оптимизации измерителя для дальностей
или
соответственно.
Погрешность углового шума. Погрешность
 ,
вызываемая угловым шумом, рассчитывается
(в радианах) по формуле
,
вызываемая угловым шумом, рассчитывается
(в радианах) по формуле

где
 - максимальный размер цели.
- максимальный размер цели.
При переходе к угловым секундам принимает вид

Аппаратурная погрешность. Расчет выполняется с помощью соотношения (3.3), которое можно использовать непосредственно или записать в более привычном виде

При


При


Найдём относительную аппаратурную
погрешность
 и сравним ее с допустимым значением
,
указанным в исходных данных.
и сравним ее с допустимым значением
,
указанным в исходных данных.

Полная погрешность. Полная погрешность рассчитывается с помощью соотношения

|
|
|
|
|
|
0,05 |
49,861 |
360,99 |
0,134 |
58,08735 |
29,04367 |
0,15 |
25,127 |
120,33 |
0,058 |
27,01947 |
13,50974 |
0,25 |
18,845 |
72,198 |
0,023 |
19,76539 |
9,882694 |
0,35 |
15,698 |
51,57 |
3,706e-4 |
16,26506 |
8,132532 |
0,45 |
13,731 |
40,11 |
0 |
14,12439 |
7,062197 |
0,55 |
12,354 |
32,81727 |
0 |
12,6477 |
6,323852 |
0,65 |
11,322 |
27,76846 |
0 |
11,55179 |
5,775894 |
0,75 |
10,511 |
24,066 |
0 |
10,69752 |
5,348761 |
0,85 |
9,853 |
21,23471 |
0 |
10,00772 |
5,00386 |
0,95 |
9,304 |
18,99947 |
0 |
9,435735 |
4,717868 |
1 |
9,062 |
18,0495 |
0 |
9,184104 |
4,592052 |



Рис. 7
Рис. 7 показывает зависимость погрешностей от дальности, где относительная дальность берется с дискретом 0,1, а дальность меняется от = 3 км до . На графике представляется зависимость относительной погрешности от относительной дальности , меняющейся с дискретом и в пределах, указанных выше.