

Microphone and signal simulation techniques 291
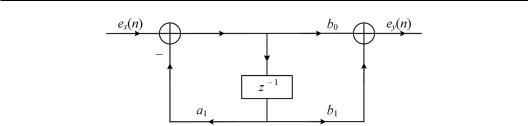
Figure 7.19 First-order IIR low-pass filters.
7.5.2 IIR filter algorithm of late reverberation
For the late diffused reverberation of a room, the temporal density of reflections from various directions increases as time is extended because of the increasing number of reflections from the boundary surfaces, as expressed in Equation (1.2.17). The overall energy of reverberations exponentially decays as time is prolonged because of the absorption of boundary surfaces. Late reverberation signals can be simulated with various perceived-based reverberation algorithms based on the statistical acoustic parameters of reverberation sound fields. Reverberation signals with a certain temporal density of reflections are enough to enhance auditory perceptions because of the limited resolution of human hearing. Schroeder (1962) suggested that a temporal density of not less than 1000/s is enough. On the basis of the results of psychoacoustic experiments, Kuttruff (2009) suggested a limit of 2000/s. Some other studies have also suggested a temporal density of ≥4000/s (Rubak and Johansen, 1998).
A plain reverberation algorithm simulates the successive reflections and decay in a room. It is implemented by combining the outputs of an infinite number of delay lines with lengths of m, 2m, 3m… samples and gains of g, g2, g3 …. (g < 1) relative to the original signal ex(n)
|
|
|
|
|
|
|
|
|
|
ey n ex n g |
q |
ex n qm . |
(7.5.21) |
||||||
|
|
||||||||
q 1 |
|
|
|
|
|
|
|
||
Equation (7.5.21) can be written in a recursive form; thus, |
|
||||||||
ey n ex n gey n m . |
(7.5.22) |
||||||||
Correspondingly, the impulse response and system function are |
|
||||||||
|
|
|
|
|
|
|
|
(7.5.23) |
|
|
|
|
|
|
q |
|
|
|
|
hREV n n g n qm , |
|
||||||||
q 1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
(7.5.24) |
HREV z 1 g |
q |
|
qm |
1 |
|
||||
|
z |
|
|
|
|
|
. |
|
|
|
|
|
|
1 gz m |
|
||||
q 1 |
|
|
|
|
|
|
|
|
|
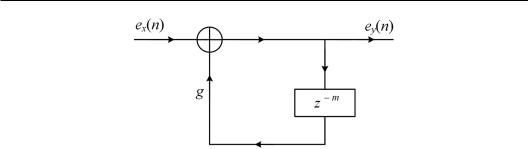
The impulse response hREV(n) in Equation (7.5.23) consists of an infinite series of unit impulses weighted with an infinite power series of g. The algorithm given by Equation (7.5.23) is called the plain reverberation algorithm, which is implemented by the IIR filter structure shown in Figure 7.20. The structure comprises a feedback loop with an m-sample
292 Spatial Sound
Figure 7.20 IIR filter structure for the plain reverberation algorithm.
delay line and g. The input and output of Figure 7.20 satisfy Equation (7.5.21), and this conclusion is easy to prove.
Equation (7.5.23) shows that each simulated reflection is delayed by m samples and attenuated g times compared with the preceding reflection. The magnitude of the qth reflection is gq times that of direct sound. As stated in Section 1.2.4, the reverberation time of the plain reverberation algorithm is evaluated by assuming 20 log10gq = −60 (dB):
T60 |
3m |
. |
(7.5.25) |
|
fs log10 g |
||||
|
|
|
For a given sampling frequency and delay line length m, T60 increases with the feedback g. The plain reverberation algorithm is simple with adjustable reverberation time and accommodates the exponential energy decay of natural reverberation. However, it suffers from the
following drawbacks:
1.Reverberation time is frequency independent, preventing it from simulating frequencydependent reverberation time caused by surface and air absorptions, which usually decrease as frequency increases in real rooms.
2.The equal time interval between two successive reflections tends to create fluttering.
Moreover, the simulated reflection density fs/m is usually small and invariable with time, which contradicts the phenomenon of increasing reflection density with time in real rooms.
3.The system function HREV(z) in Equation (7.5.24) includes m poles located at an equal interval in a circle with the radius g1/m in the Z-plane:
zp g |
1/m |
|
2 p |
p 0, 1, 2 m 1 . |
(7.5.26) |
|
|
exp j |
m |
|
|||
|
|
|
|
|
|
|
These poles cause the response magnitude |HREV(ω)| to vary with frequency, resulting in comb filtering characteristics similar to those shown in Figure 7.17(b). These characteristics cause subjective coloration in timbre. The peaks in |HREV(ω)| correspond to the poles of HREV(z). The digital angular frequencies of peaks are evaluated by substituting z = exp(jω) in Equation (7.5.26) as
p |
2 p |
p 0, 1 m 1 . |
(7.5.27) |
|
m |
|
|
A delay less than m = 44 in the plain reverberation algorithm is needed to obtain the temporal density of reflections larger than 1000/s at a sampling frequency of 44.1 kHz.

Microphone and signal simulation techniques 293
Accordingly, in Equation (7.5.25), g = 0.9966 is needed to simulate the reverberation time of T60 = 2 s. In this case, the poles in Equation (7.5.26) are located close to the unit circle | z | = 1 in the Z-plane and lead to instability in the IIR filter. For a given reverberation time T60, the delay m is increased, and g is reduced to improve the stability of the IIR filter. However, this process in turn reduces the temporal density of reflections. As such, using a single plain reverberation unit for late reflection simulation often causes perceivable artifacts. This problem prompts the improvement of the plain reverberation algorithm.
g in Equation (7.5.25) controls reverberation time. The low-pass reverberation algorithm shown in Figure 7.21 is implemented to simulate the surface and air absorption-induced decrease in reverberation time at high frequencies, where g in Figure 7.20 is replaced with a low-pass filter unit GLOW(z) (Moorer, 1979). The impulse response and system function of the low-pass reverberation algorithm are given by
hREV n
n gLOW n m gLOW n t gLOW n 2m gLOW n t gLOW n t gLOW n 3m .. ,
HREV z |
|
1 |
|
|
, |
1 |
GLOW |
z z |
m |
||
|
|
|
(7.5.28)
(7.5.29)
where gLOW(n) is the impulse response related to the low-pass filter GLOW(z), and “ t” denotes convolution. Similar to the case in Equation (7.5.19), the low-pass filter unit can be imple-
mented by an FIR or IIR structure and not repeated here.
In addition to the decrease in reverberation time at high frequencies, the reflection density in the low-pass reverberation algorithm increases with time. This behavior is consistent with the characteristics of late reflections in real rooms. High-order reflections in the low-pass reverberation algorithm are simulated through multiple convolutions with gLOW(n), which increases the temporal density of reflections.
To produce a flat static magnitude response and reduce the perceived timbre coloration, Schroeder (1962) proposed the well-known all-pass reverberation algorithm. The impulse response and system function of this algorithm are given by
|
|
g z m |
|
|
B2 |
|
|
|
|
||||
|
|
|
|
|
q |
|
qm |
||||||
HREV z |
|
|
|
|
B1 |
|
|
B1 B2 B2 g |
z |
|
|||
1 gz m |
|
1 gz m |
(7.5.30) |
||||||||||
|
|
|
|
|
|
|
|
1 g2 |
|
q 1 |
|
||
B1 |
|
1 |
|
B2 |
|
, |
|
|
|
||||
g |
|
g |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Figure 7.21 Low-pass reverberation algorithm.
294 Spatial Sound
|
|
hREV n B1 B2 n B2 gq n qm . |
(7.5.31) |
q 1
hREV(n) comprises an infinite series of unit impulses with time-decaying gains. The magnitude of the (q + 1)th reflected impulse is g times that of the qth reflected impulse. The magnitude response of the system satisfies the following equation:
|HREV | 1. |
(7.5.32) |
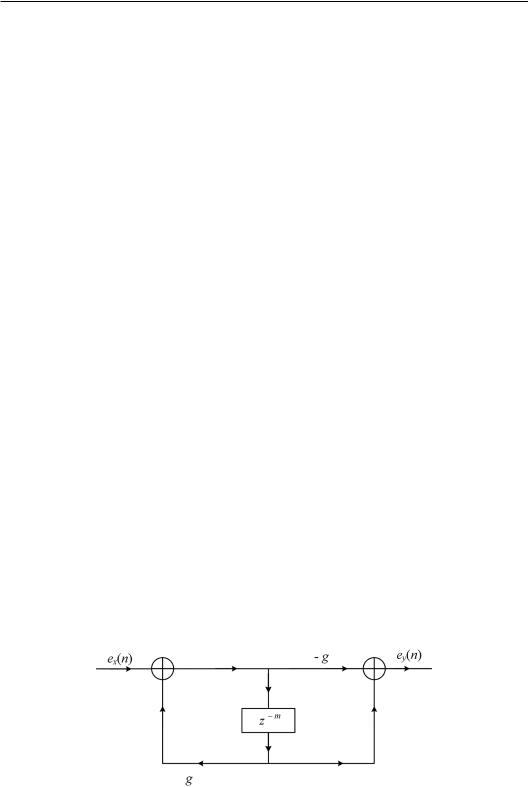
Therefore, the magnitude response is frequency independent. The all-pass reverberation algorithm can be implemented by the all-pass IIR filter structure shown in Figure 7.22. Equation (7.5.30) corresponds to the following input–output equation:
ey n gex n ex n m gey n m . |
(7.5.33) |
The all-pass reverberation algorithm cannot completely eliminate timbre coloration because of the short-term frequency analysis of human hearing. The flat static magnitude response of the algorithm is the consequence of long-term Fourier analysis.
Several all-pass reverberation units can be connected in series to increase reflection density. The ratios of delay in the all-pass reverberation unit are an irrational number so that reflections are inconsistent at the same instant. In practice, the Schroeder reverberation algorithm or the structure shown in Figure 7.23 is often adopted. The algorithm consists of several parallel plain reverberation units and a series connection of all-pass reverberation units. Reducing the coloration caused by comb filters necessitates using plain reverberation units with incommensurate delays, and the ratio between the largest and smallest delays is about 1.5. The temporal density of reflections caused by Q parallel plain reverberation units is given by
Q |
Q |
|
|||
dNdtR |
1 |
|
fs |
. |
(7.5.34) |
i |
mi |
||||
i 1 |
i 1 |
|
|||
The density of the frequency model (eigenfrequenies) is given by
|
Q |
Q |
|
|
dNf |
i |
1 |
mi. |
(7.5.35) |
df |
fs |
|||
|
i 1 |
i 1 |
|
|
Figure 7.22 IIR filter structure of the all-pass reverberation algorithm.

Microphone and signal simulation techniques 295
Figure 7.23 Schroeder reverberation algorithm.
where τi = mi / fs is the delay of the ith plain reverberation unit, mi is the corresponding delay in the measured sample, and fs is the sampling frequency. The series connection of all-pass reverberation units is intended to increase the reflection density. Other elements in Figure 7.23 are similar to those in the aforementioned discussion. However, the simulated temporal density of reflections in Figure 7.23 is constant over time. The low-pass reverberation units in Figure 7.21 can be used to replace the plain reverberation units in Figure 7.23, thereby enabling the simulation of increasing reflection density with time in real rooms (Gardner, 2002). The parameters of the reverberation algorithm can be chosen in terms of statistical acoustic characteristics of a target hall. In practice, they can be chosen on the basis of various optimal perception methods (Bai and Bai, 2005).
On the basis of the work of Stanuter and Puckette (1982), Jot and Chaigne (1991) proposed a feedback delay network (FDN) structure of reverberation algorithms. As shown in Figure 7.24, the outputs of N parallel delay lines with different lengths are connected to all N inputs by an N × N feedback matrix [A]. The feedback matrix and delay in each delay line may be designed so that the outputs of delay lines are uncorrelated. Generally, the matrix [A] is chosen as a unitarity multiplying with a gain | g | < 1 to ensure the stability of the algorithm. The FDN structure is applicable to creating multichannel uncorrelated reverberations, and the inputs of N parallel delay lines can serve as multichannel signal inputs. Stanuter and Puckette illustrated an example of a four-input–four-output structure. Appropriate filters (such as low-pass filters) can be inserted before/after each delay line to simulate frequency-dependent reverberation time, but they also cause reflection density to increase with time. The FDN is the general form of an IIR reverberation structure. In the FDN structure with N inputs and N outputs, if the feedback matrix [A] is a diagonal matrix, channels are decoupled, and their structure is simplified into the case of N independent plain or low-pass reverberation units
Various reverberation algorithms in the time domain are discussed above. Some reverberation algorithms in the time-frequency domain have also been proposed to simulate the frequency-dependent decay of late reverberation in rooms. Nikolic (2002) used quadrature mirror filters (QMF) or wavelet decomposition to decompose the input signal into 2–16