


Chapter 6
Multichannel spatial surround sound
Multichannel horizontal surround sounds are discussed in Chapters 3 to 5. A real space possesses three dimensionalities. Multichannel three-dimensional spatial surround sounds, shorten for multichannel spatial surround sound or multichannel 3D (surround) sound, should be developed to recreate the three-dimensional spatial information of sound. As an extension of multichannel horizontal surround sounds, multichannel spatial surround sounds are considered the new generation of spatial sound techniques and are addressed in this chapter. In Section 6.1, the summing localization theorems of a horizontal virtual source are extended to a three-dimensional space to provide a basis for the succeeding analyses. The principle of summing localization with two loudspeakers in the median and sagittal planes is analyzed in Section 6.2. The vector base amplitude panning, a typical signal mixing method for spatial surround sound, is examined in Section 6.3. The principle of spatial Ambisonics, another typical spatial surround sound technique and signal mixing method, is discussed in Section 6.4. Some examples of spatial Ambisonic reproduction are also given. Some advanced spatial surround sound systems and related problems are addressed in Section 6.5.
6.1 SUMMING LOCALIZATION IN MULTICHANNEL SPATIAL SURROUND SOUND
6.1.1 Summing localization equations for spatial multiple loudspeaker configurations
Similar to the cases of horizontal surround sound, virtual source localization is an important aspect of spatial surround sound. Summing localization equations for multiple horizontal loudspeakers in Section 3.2.1 should be extended to spatial multiple loudspeaker configurations to analyze the virtual source localization in a spatial surround sound (Xie X.F., 1988; Rao and Xie, 2005; Xie et al., 2019). The foundation of this extension is Wallach’s (1940) hypothesis, discussed in Section 1.6.3.
The coordinate shown in Figure 1.1 is used. At low frequencies, the head shadow is neglected, and the two ears are approximated by two points in a free space and separated by a distance of 2a (head diameter). For a point source in the direction of (rS, θS, ϕS) and a source distance of rS >> a, the incident wave can be approximated as a plane wave, and the pressures in the two ears are given by
P |
P exp |
jk |
|
r asin |
S |
cos |
|
P |
P exp |
jk |
r |
asin |
S |
cos |
|
, (6.1.1) |
||
L |
A |
|
|
S |
|
S |
R |
A |
|
|
S |
|
|
S |
|
|||
DOI: 10.1201/9781003081500-6 |
215 |
216 Spatial Sound
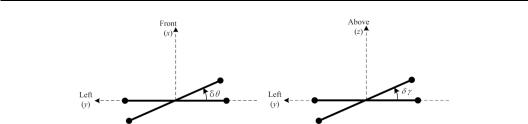
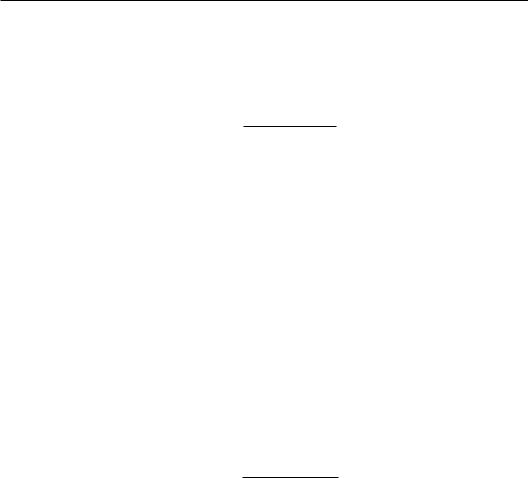
(a) Head rotation around the vertical axis (b) Head tilting around the front-backaxis
Figure 6.1 Head-turning around the vertical and front-back axes: (a) head rotation around the vertical axis; (b) head tilting around the front-back axis.
where PA is the amplitude, and k is the wave number. The interaural phase difference in pressures is calculated from Equation (6.1.1) as
L R 2kasin S cos S, |
|
(6.1.2) |
|||
or the interaural phase delay difference ITDp is given by |
|
|
|||
ITDp S, S |
|
2a |
|
|
|
|
|
c sin S cos |
S. |
(6.1.3) |
|
2 f |
|||||
When the sound source is located in the cone of confusion in Figure 1.21, sinθS cosϕS and ITDp are constant. Therefore, ITDp only is inadequate for determining the unique position of a sound source.
In Figure 6.1(a), if the head rotates around the vertical (z) axis anticlockwise with a small azimuth δθ in the horizontal (x–y) plane, ITDp becomes
ITDp S , S |
2a sin S cos S. |
(6.1.4) |
|
c |
|
Letting δθ→ 0, the variation rate or derivative of ITDp with respect to δθ is expressed as
dITDp S, S |
|
2a |
cos S cos S. |
(6.1.5) |
d |
c |
Equation (6.1.5) indicates that the variation in ITDp with head rotation is relevant to the elevation ϕS. For a given θS ≠ 90°, the magnitude of ITDp variation maximizes in the horizontal plane with ϕS = 0°. As the source elevation departs from the horizontal plane to a high or low elevation, the magnitude of variation decreases. At the top or bottom with ϕS = ±90°, ITDp is invariant against head rotation. Therefore, ITDp variation caused by head rotation provides information on vertical displacement from the horizontal plane. However, the variation in ITDp with head rotation alone does not provide enough information on up-down discrimination because of the even function characteristic of cosϕS.
As shown in Figure 6.1 (b), if the head turns around the front-back (x) axis to the left with a small angle δγ (tilting), the positions of the left and right ears become (0, acosδγ, −asinδγ) and (0, −acosδγ, asinδγ) in Cartesian coordinates, respectively. Similar to the above derivation, ITDp becomes
ITDp S, S, 2ca sin S cos S cos sin S sin . |
(6.1.6) |

Multichannel spatial surround sound 217
Letting δγ → 0, the variation rate or derivative of ITDp with respect to δγ is given by
dITDp S, S |
|
2a |
sin S. |
(6.1.7) |
d |
c |
In a horizontal plane with ϕS = 0°, ITDp is invariant against head tilting. As the source departs from the horizontal plane to a high or low elevation, the magnitude of ITDp variation with head tilting increases. Head tilting provides supplementary information on up-down discrimination because of the odd function characteristic of sinϕS. This analysis is the mathematical expression of Wallach’s hypothesis and was experimentally validated by Perrett and Noble (1997).
In the case of summing localization with multiple loudspeakers, if M loudspeakers are arranged on a spherical surface with a large radius r0>>a, then the incident wave near the origin can be approximated as a plane wave. Let (θi, ϕi) be the direction of the ith loudspeaker and Ai be the normalized amplitude or gain of the corresponding loudspeaker signal. According to Section 3.2.1, for a unit signal waveform in the frequency domain, binaural sound pressures are a linear superposition of the plane wave (far-field) pressures caused by all loudspeakers; for the arbitrary signal waveform EA(f), the following equation should be multiplied by EA(f):
|
|
M 1 |
|
|
|
|
|
|
|
P |
|
A exp |
jk |
r asin |
i |
cos |
|
|
|
L |
|
i |
|
|
0 |
i |
(6.1.8) |
||
|
|
i 0 |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
M 1 |
|
|
|
|
|
|
|
P |
|
A exp jk |
r asin |
i |
cos |
|
|
||
R |
|
i |
|
|
0 |
i |
|
||
i 0
Similar to the case of two-channel stereophonic sound in Section 2.1.1, the interaural phase delay difference is evaluated using
ITDp,SUM SUM
2 f
|
|
|
M 1 |
|
|
|
|
|
Ai sin kasin i cos i |
|
|
|
1 |
|
i 0 |
|
(6.1.9) |
|
arctan |
|
. |
||
f |
M 1 |
||||
|
|
Ai cos kasin i cos i |
|
|
|
|
|
|
|||
|
|
|
i 0 |
|
|
ITDp is the dominant cue for lateral localization at low frequencies; as such, the lateral position of the virtual source for a fixed head is found by comparing Equations (6.1.9) and (6.1.3):
|
|
|
|
M 1 |
|
|
|
|
|
|
Ai sin kasin i cos i |
|
|
sin I cos I |
|
1 |
|
i 0 |
|
(6.1.10) |
|
arctan |
|
. |
|||
ka |
M 1 |
|||||
|
|
|
Ai cos kasin i cos i |
|
|
|
|
|
|
|
|||
|
|
|
|
i 0 |
|
|
218 Spatial Sound
Equation (6.1.10) indicates that the virtual source direction generally depends on ka or frequency. At very low frequencies with ka << 1, Equation (6.1.10) can be expanded as a Taylor series of ka. If the first expansion term is retained, the equation is simplified as
M 1
Ai sin i cos i
sin I cos I i 0 M 1 . (6.1.11)
Ai
i 0
In this case, the virtual source direction is independent of ka or frequency.
If the head rotates around the vertical (z) axis anticlockwise with a small azimuth δθ, the
variation rate ITDp,SUM with δθ can also be evaluated. At very low frequencies with ka << 1, the result is
|
|
|
M 1 |
|
|
dITDp,SUM |
|
2a |
Ai cos i cos i |
|
|
i 0 |
. |
(6.1.12) |
|||
d |
c |
M 1 |
|||
|
Ai |
|
|
||
|
|
|
|
|
i 0
If ITDp variation caused by head rotation provides information on vertical displacement from a horizontal plane, then comparing Equation (6.1.12) with Equation (6.1.5) yields
M 1
Ai cos i cos i
cos I cos I i 0 M 1 . (6.1.13)
Ai
i 0
Similarly, if the head tilts around the front-back axis with a small angle δγ, the variation
rate ITDp,SUM with δγ can also be evaluated. If head tilting provides supplementary information on up-down discrimination, then comparing the result of multiple loudspeakers with
Equation (6.1.7) at very low frequencies with ka << 1 yields
M 1
Ai sin i
sin I |
i 0 |
. |
(6.1.14) |
M 1 |
|||
|
Ai |
|
|
i 0
Equations (6.1.11), (6.1.13), and (6.1.14) are a set of summing localization equations for multiple loudspeakers in a three-dimensional space.
In addition, if the head rotates around the vertical axis with an angle δθ, ITDp,SUM in Equation (6.1.9) becomes