


Horizontal surround with regular loudspeaker configuration 153
pressures and thus recreate a virtual source between loudspeakers by changing the interchannel difference (such as ICLD) between two loudspeaker signals. By contrast, a pair of LF and LB loudspeakers fail to control the interaural difference between the binaural pressures because of the front-back symmetry. The geometrical relationship of the positions of two ears and loudspeakers has been misunderstood in recreating a lateral virtual source with LF and LB loudspeakers in a quadraphone. From the point of psychoacoustics, a stable lateral virtual source cannot be recreated with a pair of lateral loudspeakers symmetrically arranged from front to back (Cooper, 1987). After the head rotates 90° to the left, the original LF and LB loudspeakers are left-right symmetrically located in the RF and left-front directions with respect to the new orientation of the head, respectively. In this case, the LF and LB loudspeakers can recreate a virtual source at the intermediate direction between two loudspeakers. This result is predicted with Equation (4.1.3).
The aforementioned analysis indicates that evaluating the virtual source direction with Equation (3.2.9) for the head oriented to the virtual source only or equally with Equation (3.2.22), derived from the velocity localization vector only, is incomplete or inappropriate. The aforementioned analysis reveals the limitation of Makita’s hypothesis. The virtual source direction should be evaluated with a combination of Equations (3.2.7) and (3.2.9), i.e., through a comprehensive analysis of the interaural phase delay difference for a fixed head and the variation in the interaural phase delay difference after head rotation.
4.1.3 Discrete quadraphone with the first-order sound field signal mixing
Similar to the XY microphone technique for two-channel stereophonic sound in Section 2.2.1, the first-order sound field signals for a discrete quadraphone can be recorded by combining the pressure and pressure-gradient microphones discussed in Section 1.2.5 (Yamamoto, 1973). Four identical combinations of pressure and pressure-gradient microphones with their main axes pointing to the horizontal LF(45°), LB(135°), RB (−135°), and RF (−45°) directions are used to capture source signals. The four microphone signals are amplified and then fed to the corresponding loudspeakers. From Equation (1.2.41), when α between the source direction and main axes of the microphones is represented with the horizontal source azimuth, the normalized amplitudes of the four microphone or loudspeaker signals are given by
A A |
A |
1 bcos |
S |
45 |
|
||
0 |
LF |
total |
|
|
|
||
A |
A |
A |
1 |
bcos |
S |
135 |
|
2 |
RB |
total |
|
|
|||
A |
A |
A |
1 bcos |
135 |
, |
(4.1.11) |
|||||
1 |
|
LB |
|
total |
|
S |
|
|
|
||
A |
A |
|
A |
1 |
bcos |
S |
45 . |
|
|||
|
3 |
RF |
|
total |
|
|
|
|
|
||
where θS is the source azimuth in the original sound field or the target virtual source azimuth
in reproduction, and Atotal is a constant related to the overall gain of the system and determined by the sensitivity A′mic of microphones and the gains of amplifiers. b> 0 specifies the
directivity of microphones.
Localization theorem (Section 3.2) is applied to analyze the virtual source in reproduction (Xie X.F., 1977). At low frequencies, the virtual source position is evaluated by substituting Equations (4.1.1) and (4.1.11) into Equations (3.2.7) and (3.2.9), respectively. For a fixed head,
sin I b sin S. |
(4.1.12) |
2 |
|
154 Spatial Sound
For the head oriented to the virtual source,
tan I tan S. |
(4.1.13) |
Therefore, the perceived virtual source direction in reproduction depends on parameter b
of the microphones but is independent of the overall gain. When |
|
|
b = 2, |
(4.1.14) |
|
Equations (4.1.12) and (4.1.13) yields |
|
|
sin I sin S |
tan I tan S . |
(4.1.15) |
That is, |
|
|
I I |
S. |
(4.1.16) |
In this case, the perceived virtual source azimuth matches that of the target source within the full horizontal direction of−180° ≤ θS ≤ 180°, and the results for the head oriented to the virtual source are consistent with those of a fixed head. Moreover, Equation (3.2.29) verifies that parameter b = 2 leads to a unit velocity vector magnitude rv = 1. Therefore, a discrete quadraphone with the first-order sound field signals can theoretically recreate a full 360° horizontal virtual source at low frequencies. This feature is ideal and desirable.
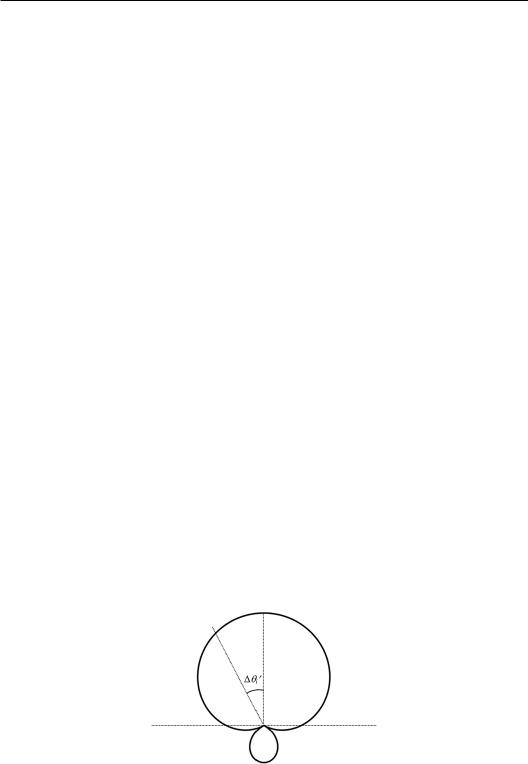
The microphone with b = 2 exhibits a supercardioid directional characteristic similar to that in Figure 1.8. Figures 4.4 illustrates the two-dimensional polar pattern of a microphone
with b = 2. Atotal is normalized so that the maximal on-axis response of a microphone is a |
|
unit. Let θi represent the main axis orientation of the ith microphone. The main response |
|
(lobe) of each microphone is centered around the main axis direction θ′i |
= (θs − θi) = 0°and |
maximizes at the on-axis direction. The response magnitude decreases as | |
θ′i| increases and |
becomes null at | θ′i| = 120°. As | θ′i| further increases, the responses exhibit a negative (out- |
|
of-phase) rear lobe. The maximal magnitude of the rear lobe drops to −9.5 dB in comparison with that of the main lobe.
Figure 4.4 Two-dimensional polar pattern of the first-order sound field microphone with b = 2 (the maximal on-axis response is normalized to a unit).
Horizontal surround with regular loudspeaker configuration 155
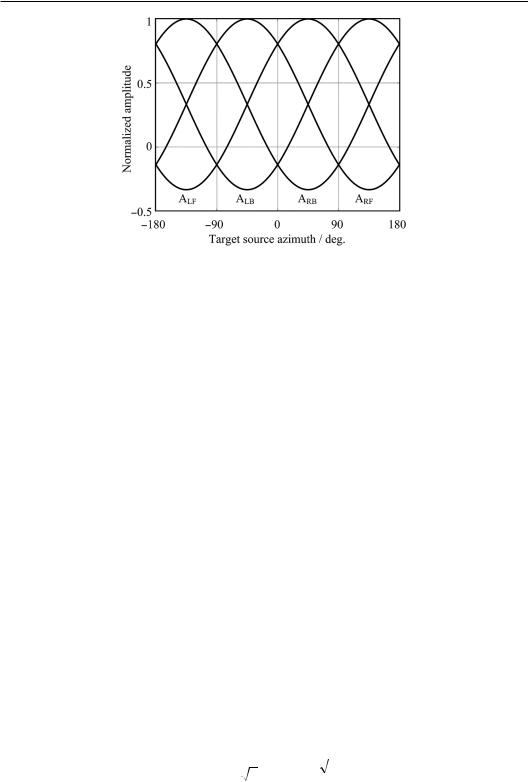
Figure 4.5 Microphone amplitude responses or the panning curve of the first-order sound field signal mixing for a quadraphone.
The pair-wise amplitude panning is a local amplitude-based panning or mixing method. In this method, a signal is mixed or panned to a pair of adjacent loudspeakers to create a virtual source between them. For a virtual source in either of the loudspeaker directions, a signal is panned to one of the loudspeakers only, and the signal of the other loudspeaker vanishes. By contrast, sound field signal mixing is an essentially global amplitude-based mixing or panning method. In this method, a signal is mixed or panned to all loudspeakers to create a virtual source except for a few target source directions. Even for a target source in a loudspeaker direction, the signal may be fed to a given loudspeaker and be spread to other loudspeakers. In other words, loudspeaker signals may encounter crosstalks. This feature distinguishes global amplitude-based mixing from local amplitude-based mixing.
Figure 4.5 illustrates the variations in four microphone amplitude responses versus a target source azimuth or the panning curve of four loudspeaker signals for the first-order sound field signal mixing. One of the four loudspeaker signals vanishes for some special target azimuths at which the angle between a given loudspeaker and the target source is 120°.Thus, the target source is exactly located in the null direction of the corresponding microphone. Even in this case, the signals of the three other loudspeakers remain. Moreover, the signal of the loudspeaker opposite to the target virtual source direction is out of phase. As stated in Section 3.2.2, this out-of-phase loudspeaker signal is necessary to ensure the velocity vector magnitude rv = 1. Therefore, from the point of psychoacoustics, the out-of-phase crosstalk signal from the opposite loudspeaker is beneficial to recreating a stable virtual source at the central listening position. However, at the off-central listening position close to the opposite loudspeakers, excessive crosstalk may cause a virtual source to collapse to the opposite loudspeaker direction.
Equation (4.1.16) is valid at very low frequencies. As frequency increases, Equation (3.2.6) should be used to evaluate the virtual source direction, and Equation (3.2.9) is applied to resolve front-back ambiguity (Xie and Liang, 1995). When Equations (4.1.1) and (4.1.11) are substituted into Equation (3.2.6), the virtual source direction for affixed head is given by
sin I |
1 |
|
|
2 |
|
|
|
|
arctan |
2 sin S tan |
ka |
. |
(4.1.17) |
||||
|
|
|||||||
|
ka |
|
|
2 |
|
|
|
|
|
|
|
|
156 Spatial Sound
When
2 |
ka |
|
, |
(4.1.18) |
|
2 |
2 |
||||
|
|
|
or
f fC |
c |
, |
(4.1.19) |
2 2a |
tan 2ka/2 0 , and sinθI possesses the same sign or polarity as sinθS. Combined with
Equation (3.2.9), θI is located in the same quadrant as θS. Equation (4.1.19) is the upper frequency limit of Equation (4.1.17). When a precorrected head radius of a′ = 1.25 × 0.0875 m to replace a in Equation (4.1.19) and when the speed of sound of c = 343 m/s is chosen, Equation (4.1.19) yields fC = 1.1 kHz.
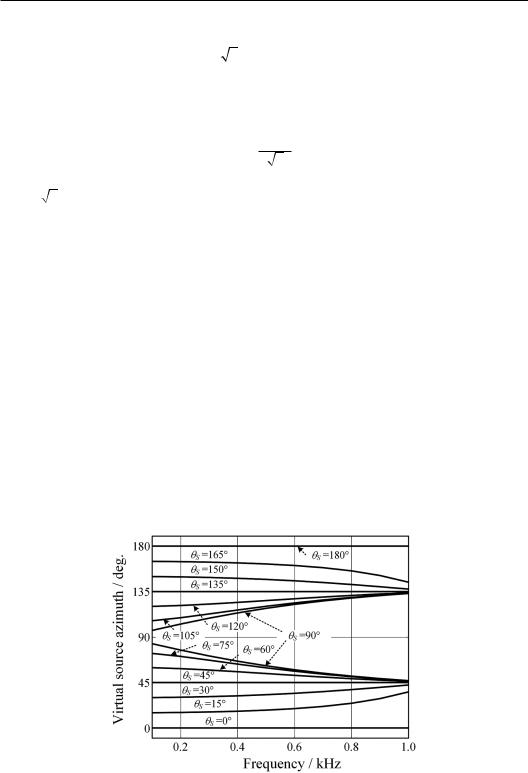
From Equations (4.1.17) and (4.1.18) and under the parameters given above, the variation in the virtual source direction with frequency for various values of θS is evaluated. Figure 4.6 illustrates the results of a target source in the left half-horizontal plane with 0° ≤ θS ≤ 180° for a fixed head. The results of the target source in the right half-horizontal plane can be derived from the left-right symmetry. Figure 4.6 indicates the following:
1. At the special source azimuths of θS = 0°,45°, 135°, and 180°, θI is independent of the frequency.
2. As frequency increases, the virtual source in the left–front quadrant with target azimuth 0° < θS < 45° and 45° < θS < 90° moves from θI = θS at low frequencies toward the direction of LF loudspeakers (45°). When frequency approaches fC as expressed in Equation (4.1.19), the virtual source is adjacent to the LF loudspeakers.
3. As frequency increases, the virtual source in the left-back quadrant with a target azimuth of 90° < θS < 135°and 135° < θS < 180° moves from θI = θS at low frequencies toward
Figure 4.6 Variation in the virtual source direction with frequency for different target azimuths in a discrete quadraphone with the first-order sound field signal mixing.