

Lowpass and Highpass Filter Characteristics 187
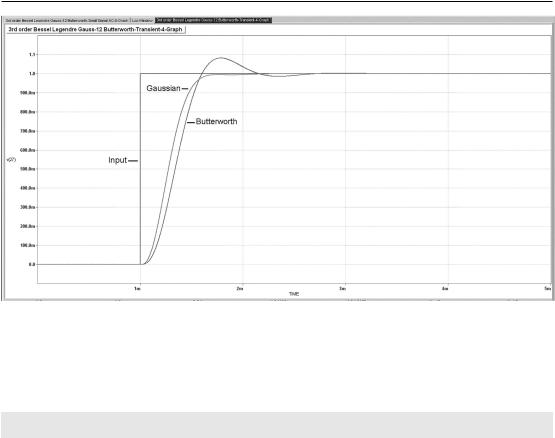
Figure 7.42: The step response of 3rd-order Gaussian-12 dB and Butterworth lowpass filters. Cutoff frequency is 1 kHz.
Table 7.12: Frequencies and Q’s for Gaussian filters up to 8th-order. Stages are arranged in order of increasing Q; odd-order filters have the 1st-order section at the end with no Q shown.
Order |
Freq 1 |
Q 1 |
Freq 2 |
Q 2 |
Freq 3 |
Q 3 |
Freq 4 |
Q 4 |
|
|
|
|
|
|
|
|
|
2 |
0.9170 |
0.6013 |
|
|
|
|
|
|
3 |
0.9923 |
0.5653 |
0.9452 |
n/a |
|
|
|
|
4 |
0.9930 |
0.6362 |
1.0594 |
0.5475 |
|
|
|
|
5 |
1.0427 |
0.6000 |
1.1192 |
0.5370 |
1.0218 |
n/a |
|
|
6 |
1.0580 |
0.6538 |
1.0906 |
0.5783 |
1.1728 |
0.5302 |
|
|
7 |
1.0958 |
0.6212 |
1.1358 |
0.5639 |
1.2215 |
0.5254 |
1.0838 |
n/a |
8 |
1.1134 |
0.6644 |
1.1333 |
0.5994 |
1.1782 |
0.5537 |
1.2662 |
0.5219 |
|
|
|
|
|
|
|
|
|
Legendre-Papoulis Filters
The Legendre-Papoulis filter is a monotonic all-pole filter; in other words the response is always downwards. It is optimised for the greatest slope at the passband edge, given this condition. It gives faster attenuation than the Butterworth characteristic, but the snag is that the passband is not
maximally flat, as is the Butterworth; instead it slopes gently until the rapid roll-off begins. This is the crucial difference. Legendre-Papoulis filters can be useful in applications which need a steep cutoff at the passband edge but cannot tolerate passband ripples, or in cases where a Chebyshev I filter produces too much group delay at the passband edge. It is essentially a compromise between the
188 Lowpass and Highpass Filter Characteristics
Butterworth and the Chebyshev filters; it has the maximum possible roll-off rate for a given filter order while maintaining a monotonic amplitude response. Legendre-Papoulis filters are often simply called Legendre filters.
A 2nd-order Legendre-Papoulis response is exactly the same as the Butterworth response. With a 2ndorder filter the only parameter you have to play with is Q, and the highest Q that can be used without causing peaking (in which case the response would no longer be monotonic) is the familiar 1/√2 which gives the Butterworth response.
Legendre filters are only different from Butterworth filters for 3rd-order and above.
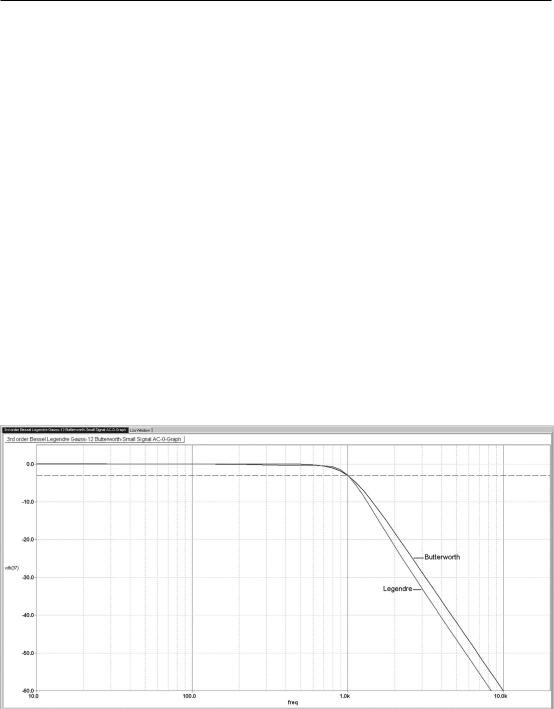
The amplitude responses of 3rd-order Legendre-Papoulis and Butterworth filters are compared in Figure 7.43.You will note that the differences are not very great. Compared with the Butterworth, the Legendre-Papoulis sags by 0.5 dB around 500 Hz, which may or may not be negligible depending on your application. Once the roll-off has begun, the Legendre-Papoulis is usefully if not dramatically superior; at 2 kHz it gives 3.7 dB more attenuation, while at 3 kHz it gives 4.3 dB more.After that the difference is effectively constant at 4.4 dB, as the two curves must ultimately run parallel at −18 dB/ octave, both filters being 3rd-order. Legendre-Papoulis filters are all-pole filters.
The Legendre-Papoulis filter was proposed byAthanasios Papoulis in 1958. [22] It is also sometimes known simply as a Legendre filter, an “Optimum L” filter or just an “Optimum” filter. The filter design is based on Legendre polynomials; their French inventor,Adrien-Marie Legendre (1752–1833), was yet another mathematician who did not live to see his mathematics applied to electrical filters.
The fact that the response is monotonic but not maximally flat means that Legendre-Papoulis filters are of little use in many hi-fi applications. For example, a subsonic filter for a phono input needs to
Figure 7.43: Amplitude response of 3rd-order Legendre and Butterworth filters. Cutoff frequencies are 1 kHz.
Lowpass and Highpass Filter Characteristics 189
be maximally flat, as a slow early roll-off will cause increased RIAAerrors in the low-frequency part of the audio range. However, it is possible that Legendre-Papoulis filters may be of use in crossover design.
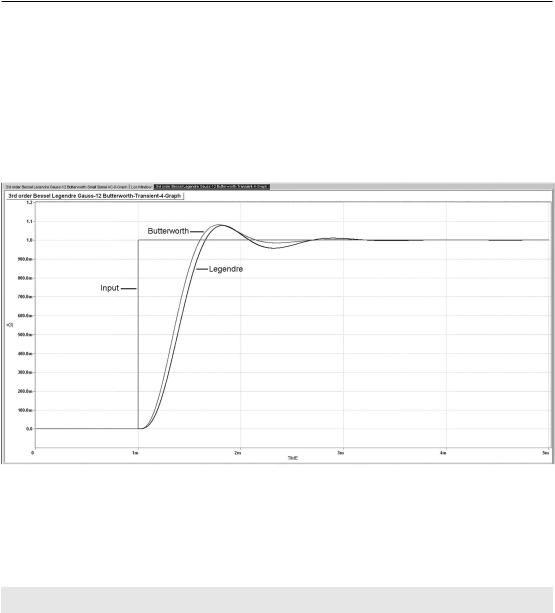
The step response of the Legendre-Papoulis filter is similar to that of the Butterworth. Figure 7.44 shows that the response is slightly slower, with about the same amount of overshoot, but after that the undershoot is significantly greater. The Legendre-Papoulis is essentially a frequency-domain filter.
The Legendre filter should not be confused with the Laguerre filter. C’est magnifique, mais ce n’est pas
Laguerre. [23]
Figure 7.44: Step response of 3rd-order Legendre and Butterworth filters. Cutoff frequencies are 1 kHz.
Table 7.13: Frequencies and Q’s for Legendre-Papoulis filters up to 8th-order. Stages are arranged in order of increasing Q; odd-order filters have the 1st-order section at the end with no Q shown.
Order |
Freq 1 |
Q 1 |
Freq 2 |
Q 2 |
Freq 3 |
Q 3 |
Freq 4 |
Q 4 |
|
|
|
|
|
|
|
|
|
2 |
1.000 |
0.707 |
|
|
|
|
|
|
3 |
0.9647 |
1.3974 |
0.6200 |
n/a |
|
|
|
|
4 |
0.9734 |
2.1008 |
0.6563 |
0.5969 |
|
|
|
|
5 |
0.9802 |
3.1912 |
0.7050 |
0.9082 |
0.4680 |
n/a |
|
|
6 |
0.9846 |
4.2740 |
0.7634 |
1.2355 |
0.5002 |
0.570 |
|
|
7 |
0.9881 |
5.7310 |
0.8137 |
1.7135 |
0.5531 |
0.7919 |
0.3821 |
n/a |
8 |
0.9903 |
7.1826 |
0.8473 |
2.1807 |
0.6187 |
1.0303 |
0.4093 |
0.5573 |
|
|
|
|
|
|
|
|
|

190 Lowpass and Highpass Filter Characteristics
Laguerre Filters
The Laguerre filter is a generalisation of a transversal filter. These filters use only delay stages or a tapped delay line, and the weighted sum of the taps gives the required frequency response. The
Laguerre filter is implemented in the analogue domain by replacing each true delay stage of the transversal filter by a 1st-order allpass section and by applying a 1st-order lowpass filter with the same cutoff frequency as the allpass sections to the filter input signal. The Laguerre filter is normally implemented in the DSPdomain as a FIR filter. In the analogue domain the amount of hardware to realise the stages is likely to be excessive.
There are several filters of this sort; if the delay line is composed of 1st-order lowpass sections it is called a Gamma filter. [24] Such a filter may also be made of 1st-order allpass filters [25] or a combination of 1st-order lowpass and allpass filters, in which case it is a Laguerre filter, [26] which as you may have seen coming, is based on the Laguerre polynomials, [27] introduced by Edmond
Laguerre (1834–1886). I am not aware that these kinds of filter have been used in crossovers, but it is as well to know their names in case you do come across them.
It is unsettling to find that Laguerre filters are very popular for analysing financial data in the hope of making a quick buck on stock price movements.
Synchronous Filters
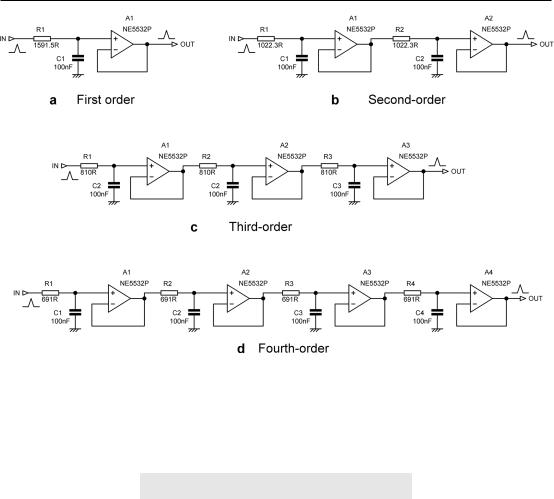
Synchronous filters consist of a number of identical 1st-order stages in cascade. Since there are no 2nd-order stages, the response is inevitably monotonic. The term “synchronous” refers to the fact that all the stages have an identical cutoff frequencies and therefore identical time-responses; it has nothing to do with system clocks or digital data transmission.You cannot produce a synchronous filter simply stringing together a chain of R’s and C’s; each 1st-order RC stage must be isolated from the next by a buffer stage to prevent loading and interaction effects. Figure 7.45 shows 2nd-, 3rd-, and 4th-order synchronous filters made in this way.All are designed to be −3 dB at 1 kHz overall, so the stage frequencies for the higher-order filters are increased so that the overall response passes through this point. For example, the 4th-order filter has four stages with cutoff (−3 dB) frequencies of 2.303 kHz, each of which give −0.75 dB at 1 kHz; when the four stages are used together the attenuation is therefore −3 dB at 1 kHz. The cutoff frequencies required for 2nd-, 3rd-, and 4th-order synchronous filters are given in Table 7.14.
Figure 7.46 shows the amplitude response, which has a slower roll-off than the Bessel filter because of a complete lack of internal peaking. The response differences below the −3 dB point are very small. It does not at present appear very likely that synchronous filters will be useful in crossover filters as such because of their very slow rate of roll-off, but it is a branch of filter technology to be aware of because they may be appropriate for specific equalisation of drive unit roll-offs.
Looking at Figure 7.45, you can see that making high-order synchronous filters by stringing together 1st-order stages uses a lot of amplifiers for buffering. However, a 2nd-order stage with a Q of 0.5 is equivalent to two cascaded 1st-order stages, and the circuit shown in Figure 7.47a saves one amplifier section for a 2nd-order filter.A2nd-order stage with a Q of 0.5 is also equivalent to a 2ndorder Linkwitz-Riley filter, but this relationship does not hold for 3rd-order and higher filters. It is
Lowpass and Highpass Filter Characteristics 191
Figure 7.45: First-, 2nd-, 3rd-, and 4th-order synchronous lowpass filters constructed from repeated 1st-order sections. All four filters are −3 dB at 1 kHz.
Table 7.14: Cutoff frequencies for synchronous filters that give cutoff at 1.000 when stages are cascaded.
Order |
Cutoff frequency |
|
|
1 |
1.0000 |
2 |
1.5568 |
3 |
1.9649 |
4 |
2.3033 |
|
|
not possible to replace three cascaded 1st-order stages with a 2nd-order stage of any Q because the ultimate slope is 12 dB/octave rather than 18 dB/octave.
A3rd-order synchronous filter can be built in two stages, as in Figure 7.47b, by simply putting another synchronous 1st-order stage after the 2nd-order stage, but only one amplifier is saved because of the need to buffer the final pole R3–C3 withA2.Abetter solution is the one-stage Geffe filter at Figure 7.47c, [28] which saves two amplifiers compared with Figure 7.45c; the component ratios are R2 = 2R1, R3 = R1, C2 = C1, C3 = C1/2.A4th-order synchronous filter can be economically built
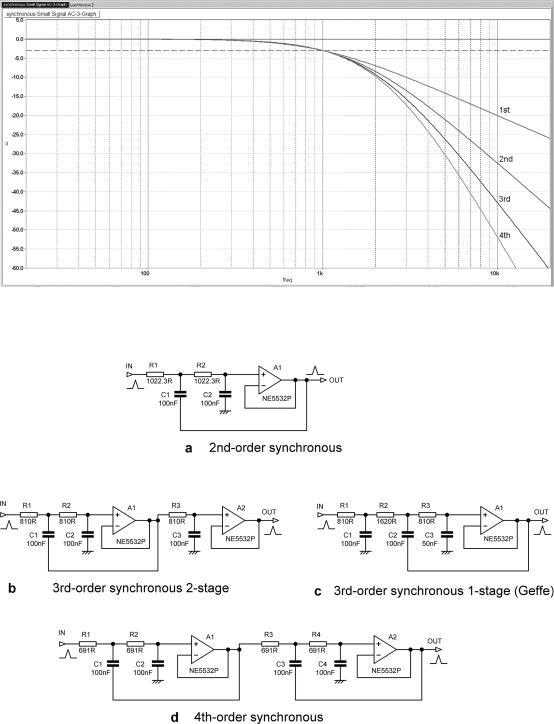
Figure 7.46: Amplitude response of 2nd-, 3rd-, and 4th-order synchronous lowpass filters, all designed to be −3 dB at 1 kHz.
Figure 7.47: More efficient ways to make higher-order synchronous lowpass filters using 2nd-order filters with Q = 0.5. All filters are −3 dB at 1 kHz.