

Subtractive Crossovers 135
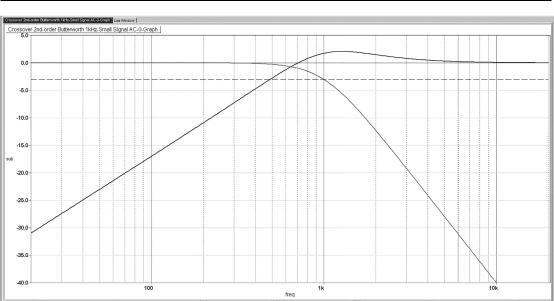
Figure 6.4: Frequency responses of 2nd-order Butterworth subtractive crossover; both filter outputs plus their sum (straight line at 0 dB). Dashed line is at −3 dB.
Third-Order Butterworth Subtractive Crossovers
A3rd-order subtractive crossover can be made in just the same way by replacing the 2nd-order lowpass filter with a 3rd-order one and carrying out the same subtraction. If we plug in a 3rd-order Butterworth, we find that the results are no better—in fact they are rather worse. The crossover is still asymmetrical, for despite the use of a 3rd-order filter instead of a 2nd-order one, the HF output still only has a slope of 6 dB/octave. The unwelcome peak in the response is still there; now it is at slightly below the crossover frequency and it has grown to +4.0 dB in height. Third-order filters are clearly not the answer.
Fourth-Order Butterworth Subtractive Crossovers
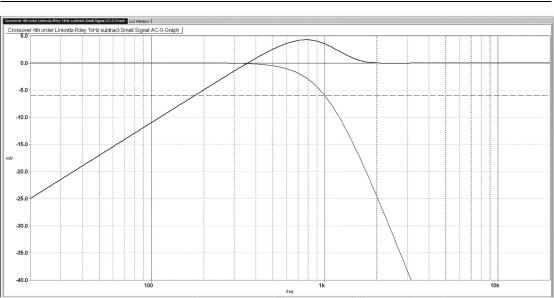
If we try a 4th-order Butterworth as the lowpass filter, the results are much the same. The LF output is the direct output of the lowpass filter and thus is what we expect, rolling off at a satisfactory 24 dB/octave. The HF output slope stays stubbornly at 6 dB/octave, and the peak moves down a little in frequency and grows in height to +5.2 dB. The crossover is still asymmetric—in fact it is more asymmetric, with the LF slope now being four times that of the HF slope.
You may be thinking at this point that we are making a crass mistake by using Butterworth filters, and some other filter characteristic like Bessel or Chebyshev would give better results. The most popular 4th-order crossover is the Linkwitz-Riley alignment (equivalent to two cascaded 2nd-order Butterworth filters), so let’s see if using that for the lowpass filter makes a revolutionary difference.
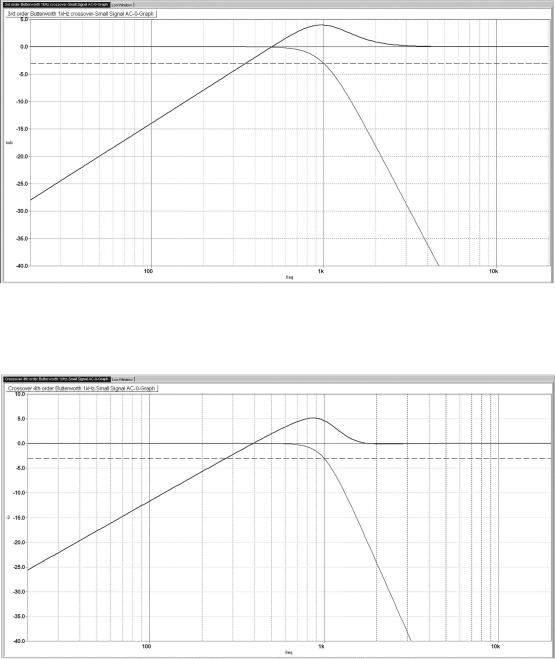
Figure 6.5: Frequency response of 3rd-order Butterworth subtractive crossover; both filter outputs plus their sum (straight line at 0 dB). Dashed line is at −3 dB.
Figure 6.6: Frequency response of 4th-order Butterworth subtractive crossover; both filter outputs plus their sum (straight line at 0 dB). Dashed line is at −3 dB.
Subtractive Crossovers 137
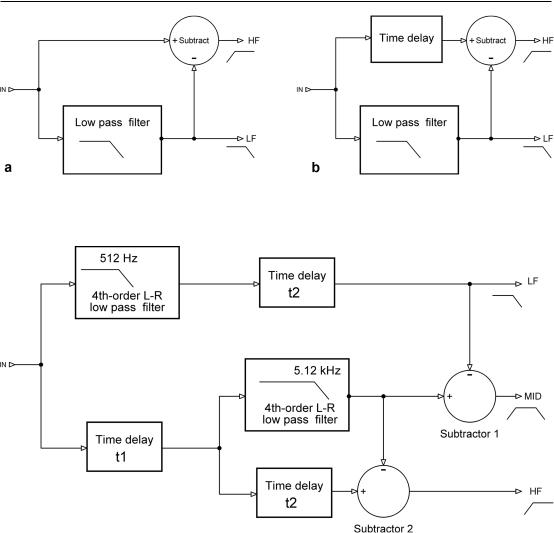
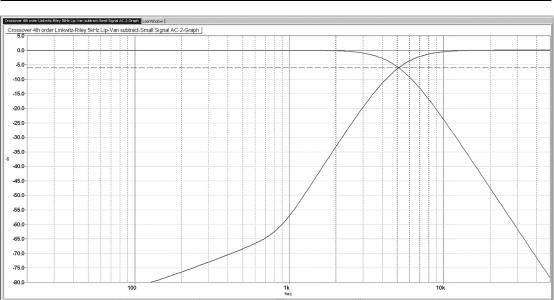
Figure 6.7: Frequency response of 4th-order Linkwitz-Riley subtractive crossover; both filter outputs plus their sum (straight line at 0 dB). Dashed line is at −6 dB.
Not at all.As Figure 6.7 shows, the crossover is still highly asymmetrical because the HF output still has that useless 6 dB/octave slope. The height of the peak is slightly less at +4.3 dB, but that’s precious little help.
Subtractive Crossovers With Time Delays
In 1983 Lipshitz & Vanderkooy [3] proposed that linear-phase crossover networks could be produced by a subtractive method, the key idea being that a time delay inserted in the unfiltered path would compensate for the phase-shift in the lowpass filter and allow crossovers to be designed with symmetrical slopes of useful steepness. The basic arrangement is shown in Figure 6.8b.
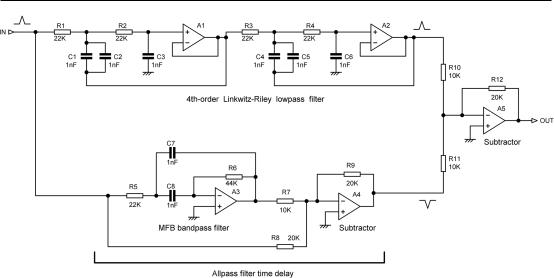
To the best of my knowledge, the only practical design of this sort of crossover that has been published was by Harry Baggen, in a famous article in Elektor in 1987. [4] It was a 3-way crossover based on 4th-order Linkwitz-Riley filters. Since the highpass outputs were derived by subtraction, using the time-delay concept, only two Linkwitz-Riley filters were required, to some extent making up for the extra cost of the subtractors and the 2nd-order allpass filters used to create the delays. This crossover may be over 20 years old, but its conceptual significance is such that it is still being actively discussed today.
The block diagram of this crossover is shown in Figure 6.9. The crossover frequencies were nominally 500 Hz and 5 kHz, but the actual frequencies calculated from the original component values are 512 Hz and 5.12 kHz. The 512 Hz 4th-order Linkwitz-Riley lowpass filter gives the LF output, while its phase-shift is compensated for in the lower path by the delay filter t1.Ahighpass signal is derived
138 Subtractive Crossovers
Figure 6.8: Basic subtractive crossover is at (a). Adding a time delay in the unfiltered path
(b) allows symmetrical-slope crossover outputs to be derived.
Figure 6.9: Block diagram of Elektor subtractive 3-way crossover with time delays.
from it by Subtractor 1. The circuit section, including the 5.12 kHz lowpass filter, a delay block t2, and Subtractor 2, is as shown in Figure 6.8b and derives the HF output. The signal from the 5.12 kHz lowpass filter then has the signal from the 512 Hz lowpass filter subtracted from it to create the MID output; note that another t2 delay block is inserted into this path to allow for the phase-shift in the 5.12 kHz lowpass filter.
Since the 3-way nature of the crossover makes it quite complex, I thought it best to examine the time-delay principle by looking at only one section of it. The MID/HF subtractive crossover circuitry is shown in Figure 6.10, with the original component values. The 4th-order Linkwitz-Riley lowpass filter is a standard configuration made up of two cascaded Butterworth 2nd-order filtersA1,A2. The
Subtractive Crossovers 139
Figure 6.10: Schematic of the MID/HF section of the Elektor subtractive 3-way crossover with the original component values. R6 is two 22k resistors in series.
time delay t2 in the other path is realised by a 2nd-order allpass filter, made up of a multiple-feedback bandpass filterA3 and the shunt-feedback stageA4. This implements the 1-2BP2nd-order allpass configuration, where the signal is fed to a 2nd-order bandpass filter, multiplied by two, and then subtracted from the original signal. It is not what you might call intuitively obvious, but this process gives a flat amplitude response and a 2nd-order allpass phase response. Since the MFB bandpass filter phase-inverts, the subtraction can be performed by simple summation using A4. The MFB bandpass filter has unity gain at its resonance peak, so R7 needs to be half the value of R8 to implement the scaling by two. The operation and characteristics of this configuration is much more fully described in Chapter 13 on time-domain filtering.
We now have two signals, one lowpass filtered and one time delayed, and the former must be subtracted from the latter to derive the highpass output. This can again be done by a simple summing stage, in this caseA5, because the delayed signal has been phase inverted byA4, so summing is equivalent to subtraction. The alert reader—and I trust there is no other sort here—will have noticed that the phase of the signals going to the subtractorA5 in Figure 6.10 is the opposite of those shown in Figure 6.9; this is because in the complete crossover the signal entering the MID/HF crossover circuitry has already been phase inverted by the delay circuitry t1.
You are possibly thinking that the impedance levels at which this circuitry operates are rather higher than recommended in this book, and you are quite right. When the Elektor crossover was published in
1987, the 5532 opamp was still expensive, and so the crossover used TL072s. These opamps have a much inferior load-driving capability, with even light loading degrading their distortion performance, so low-impedance design was not practicable.
Figure 6.11 shows the two outputs, with nice symmetrical 24 dB/octave slopes, crossing over at −6 dB very close to 5 kHz. However, for this plot the vertical scale has been extended down to −80 dB,
140 Subtractive Crossovers
Figure 6.11: The MID/HF crossover is only symmetrical down to −60 dB. Dashed line is at −6 dB.
and you can see that something goes wrong at about −60 dB, with the derived HF output 24 dB/octave slope quite suddenly reverting to a shallow 6 dB/octave. It is highly unlikely that a shallower slope at such a low level could cause any drive unit problems, but alarm bells ring in the distance because this is a simulation, and one of the most dangerous traps in simulation is that it enables you to come up with an apparently sound circuit that actually depends critically on component values being exactly correct. Further investigation is therefore called for . . .
I suspected that the abrupt shallowing of the slope was due to the delay not being exactly matched to the lowpass filter characteristics, and to test this hypothesis I increased the allpass delay by about 2% by changing R5 to 22.5 kΩ and R6 to 45 kΩ. This raised the level at which the derived highpass output slope became shallower quite dramatically to −25 dB, as shown in Figure 6.12.
In reality you would probably find that the delay errors were larger, as they also depend on C7 and C8 in the allpass filter, and these may not be more accurate than ±5%. If all other components are completely accurate, setting C7 and C8 so they are both 5% high causes the 24 dB/octave slope of the derived signal to become 6 dB/octave at only −15 dB, which is certainly going to interfere with proper crossover operation. Setting both 5% low gives the same result. Various other twiddlings and tweakings of C7 and C8 have similar effects on the slope, which always reverts to −6 dB/octave. This is obviously not a statistically rigorous analysis of the likely errors in the delay filter, but things are not looking promising.
I then turned to the lowpass filter, introducing assorted 5% errors into the four capacitors there. It did not come as a total shock to find once more that the derived signal slope was severely compromised.