

уср 1 дис
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УО «БАРАНОВИЧСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Уср № 1
Дисциплина: «Методы дистанционных исследований»
Тема: «Физические основы, технологические средства и технология получения аэрокосмических снимков. Оптико-механические сканеры.»
Подготовила:
Студентка 2 курса
Группы ГЭ-21
White wolf
Проверил:
Преподаватель Лукашов А.А.
СОДЕРЖАНИЕ
Введение
Оптико-механические сканеры
Заключение
Введение
Сканирующие системы появились в середине 70-х годов и к концу 80-х почти полностью вытеснили традиционные фотографические и телевизионные системы. Сегодня они являются основными поставщиками данных ДЗЗ при решении задач природно-ресурсного и экологического мониторинга.
Оптико-механические сканеры
Сканерные системы дистанционного зондирования бывают двух видов – оптико-механические (делятся на линейные и поперечные) и оптико-электронные (продольные и планарные).В настоящее время для съемок из космоса наиболее часто используются многоспектральные оптико-механические системы - сканеры, установленные на ИСЗ различного назначения. При помощи сканеров формируются изображения, состоящие из множества отдельных, последовательно получаемых элементов. Термин «сканирование» обозначает развертку изображения при помощи сканирующего элемента (качающегося или вращающегося зеркала), поэлементно просматривающего местность поперек движения носителя и посылающего лучистый поток в объектив и далее на точечный датчик, преобразующий световой сигнал в электрический.
Этот электрический сигнал поступает на приемные станции по каналам связи. Изображение местности получают непрерывно на ленте, составленной из полос - сканов, сложенных отдельными элементами - пикселами. Сканерные изображения можно получить во всех спектральных диапазонах, но особенно эффективным является видимый и ИК-диапазоны. При съемке земной поверхности с помощью сканирующих систем формируется изображение, каждому элементу которого соответствует яркость излучения участка, находящегося в пределах мгновенного поля зрения. Сканерное изображение упорядоченный пакет яркостных данных, переданных по радиоканалам на Землю, которые фиксируются на магнитную ленту (в цифровом виде) и затем могут быть преобразованы в кадровую форму. Важнейшей характеристикой сканера являются угол сканирования (обзора) и мгновенный угол зрения, от величины которого зависят ширина снимаемой полосы и разрешение. В зависимости от величины этих углов сканеры делят на точные и обзорные.
Оптико-механический сканер содержит только один чувствительный элемент –датчик, который позволяет измерять яркость небольшого участка, пикселя земной поверхности. Вращающееся зеркало просматривает полосу местности, что позволяет зарегистрировать яркость целого ряда пикселей земной поверхности за короткий промежуток времени. Поскольку сканер размещается на движущейся платформе, он аналогично записывает данные о следующей полосе пикселей земной поверхности. По мере движения платформы сканирующий механизм позволяет получить изображение на целую площадь.
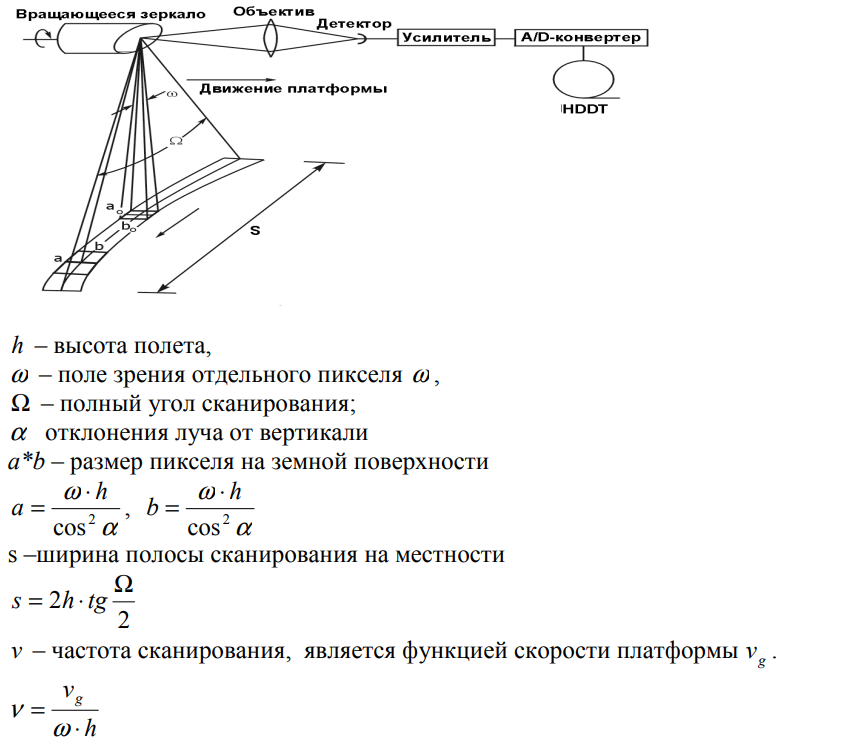
Рисунок 1 – Принцип работы оптико-механического сканера.
В сканерах этого типа установлено зеркало, которое качается из стороны в сторону поперёк направления движения спутника. На зеркало последовательно попадает отраженное излучение от разных участков поверхности вдоль строки, а с зеркала оно уже попадает на детектор. Дойдя до крайней точки строки зеркало начинает вращаться в обратную сторону, считывая следующую строку (спутник за это время пролетел расстояние, соответствующее одной строке пикселов). Таким образом, строка за строкой изображение наращивается. Колебание зеркала поперек маршрута съемки реализует строки изображения, а благодаря движению носителя происходит накопление строк и формируется полное изображение снимка, имеющее строчно-сетчатую поэлементную структуру.
Другой разновидностью линейных сканеров является сканер, в котором зеркало не качается из стороны в сторону, а вращается всегда в одном направлении вокруг своей оси, в диапазоне 360 градусов. Здесь датчик считывает сигнал вдоль строки, а затем, пока датчик делает вокруг своей оси, спутник продвигается на некоторое расстояние вперёд и датчик вновь начинает считывать следующую строку в том же направлении. За одну секунду осуществляется около 7 таких циклов.
Независимо от типа сканирующей системы полный угол сканирования поперек маршрута съемки называется углом обзора, а соответствующая величина на поверхности Земли шириной полосы съемки (другое название — ширина полосы охвата). Расстояние на земной поверхности, соответствующее расстоянию между центрами соседних пикселов, называется наземным интервалом дискретизации (другое название – наземный шаг сканирования). Наземные интервалы дискретизации вдоль и поперек маршрута съемки определяются соответствующими частотами дискретизации, а также скоростью движения платформы. Использование в некоторых системах более высокой частоты поперечной дискретизации приводит к наложению мгновенных полей обзора и, как следствие, к некоторому улучшению качества данных.
Данные, получаемые при помощи оптических датчиков с высоким пространственным разрешением, используются при решении большого числа тематических задач, включая, например, измерение протяженности и классификация растительного покрова, определение состояния сельскохозяйственных культур, геологическое картирование, контроль эрозии почв в береговой зоне и т.д. Однако область применимости этих данных несколько ограничивается тем, что получение качественных оптических снимков возможно только на освещенной части поверхности Земли в ясную, безоблачную погоду.
Заключение
В общих чертах механизм сканирования заключается в следующем: на спутнике имеется сканер, который оснащён фотоэлектрическим или термоэлектрическим приёмником. В этот приёмник попадает отражённое излучение с некоторого участка земной поверхности. Приёмник генерирует электрический сигнал, зависящий от интенсивности излучения. Величина сигнала фиксируется в памяти устройства, а датчик начинает принимать сигнал со следующего участка земной поверхности. Таким образом, участок за участком, начинает формироваться изображение. Каждый такой участок земной поверхности, отражение от которого было одномоментно зарегистрировано датчиком, на снимке отображается в виде пиксела – наименьшего неделимого элемента изображения. На каждом пикселе отражается осреднённое значение яркости всех объектов, попавших в пределы данного пиксела. Таким образом, чем меньше размер пиксела, тем качественнее изображение можно получить на снимке, так как становится возможным отображение более мелких объектов.
Барановичи, 2020