

3.2.3 Масштабы графиков второй производной
1.
Для определения линейного или углового
ускорения строим график: а=а(t)
или
![]() ,
для чего следует продифференцировать
график V=V(t)
или
,
для чего следует продифференцировать
график V=V(t)
или
![]() .
Масштабы этих графиков будут:
.
Масштабы этих графиков будут:
![]()
![]()
![]()
Здесь
![]() -
полюсное расстояние при вторичном
дифференцировании. Масштабы аналогов
ускорений:
-
полюсное расстояние при вторичном
дифференцировании. Масштабы аналогов
ускорений:
![]()
![]() ,
,
Выбрав положение центра вращения кулачка (в области возможных его положений) и, соединив его с концами отрезков на графиках , определяются углы передачи движения
 и строится график
и строится график
 .
.
3.2.4 Выбор минимального радиуса кулачковой шайбы
По
заданному закону движения
![]() произво3.2дим разметку положений точек
коромысла. Пусть это точки 1, 2, 3, …
Разметку производим как для фазы подъёма,
так и для фазы опускания. Далее, на лучах
откладываем отрезки А1, А2, … Отрезки
для фазы подъёма откладываем вправо, а
отрезки соответствующие фазе опускания,
откладываем влево от точек 1, 2, …
произво3.2дим разметку положений точек
коромысла. Пусть это точки 1, 2, 3, …
Разметку производим как для фазы подъёма,
так и для фазы опускания. Далее, на лучах
откладываем отрезки А1, А2, … Отрезки
для фазы подъёма откладываем вправо, а
отрезки соответствующие фазе опускания,
откладываем влево от точек 1, 2, …
Далее
проводим прямую под углом 90 –
![]() ,
-
выбранный максимальный угол давления,
то прямая является геометрическим
местом точек. Проводим вторую прямую
под углом равным минимальному углу
передачи движения. Угол откладывать от
прямой проходящей через начальную
точку. Область находящаяся ниже точки
пересечения этих прямых и ограничивающаяся
ими будет являться областью возможного
нахождения оси вращения кулачка.
,
-
выбранный максимальный угол давления,
то прямая является геометрическим
местом точек. Проводим вторую прямую
под углом равным минимальному углу
передачи движения. Угол откладывать от
прямой проходящей через начальную
точку. Область находящаяся ниже точки
пересечения этих прямых и ограничивающаяся
ими будет являться областью возможного
нахождения оси вращения кулачка.
Механизм будет обладать наименьшими габаритами кулачка в точке О.
3.2.5 Построение графика центра изменения угла передачи движения по углу поворота кулачка.
Выбрав положение центра вращение кулачка (в области возможных его положений) и, соединив
его с концами отрезков zi на графике zi=zi(Q), определяются углы передачи движения γi и строится график γ=γ(φ)
Значение угла передачи движения по углу поворота кулачка приведены в таблице 3.1
таблица 3.1
Положение |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
Угол передачи движения, град |
58 |
77 |
47 |
55 |
60 |
68 |
77 |
87 |
85 |
Положение |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
Угол передачи движения, град |
82 |
70 |
57 |
48 |
40 |
33 |
30 |
33 |
58 |
По данным таблицы построим γ=γ(φ)
С иловой расчёт кулачка механизма (Для положения а4)
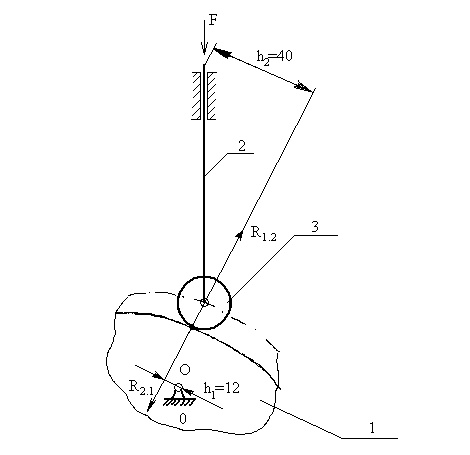
Ro.3
R0.3=-R2.1
П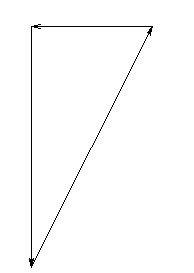 лан
сил(толкателя)
лан
сил(толкателя)
Ro.2 R1.2
Рис. 1 F
Для дальнейшего расчёта на прочность деталей кулачкового механизма выполняем силовой расчёт – определяем силы действующие на звенья механизма, реакции в кинематических парах (R0.1 R1.2 R0.2) и величину уравновешивающего момента (Му), приложенного к кулачку.
Толкатель:
![]()
![]()
строим план сил из него:
![]()
![]()
Кулачок:
![]()
![]()
Сумма моментов относительно точки О:
![]()
![]() H·м
H·м