

7.3 Реализация алгоритма оценки временного положения сигнала
Рассмотрим вопрос о построении устройства обработки принятых сигналов (приёмника) для случая одиночного сигнала. Логарифм функционала отношения правдоподобия пропорционален величине
 (7.17)
(7.17)
и
зависит от функции
![]() ,
называемой также функцией взаимной
корреляции между принятым сигналом
,
называемой также функцией взаимной
корреляции между принятым сигналом![]() и опорным
и опорным![]() .
Такое устройство соответственно называюткорреляционным
приемником.
.
Такое устройство соответственно называюткорреляционным
приемником.
Максимум
функции
![]() приводит к максимуму функционала
отношения правдоподобия
приводит к максимуму функционала
отношения правдоподобия![]() ,
то есть приёмник основан на критерии
максимума функционала правдоподобия.
,
то есть приёмник основан на критерии
максимума функционала правдоподобия.
Рассмотрим две возможные реализации такого приёмника.
7.3.1 Корреляционный приёмник
 Сигнал
Сигнал
![]() содержит истинное значение параметра
содержит истинное значение параметра![]() .
Можно, изменяя величину
.
Можно, изменяя величину![]() дискретно (или непрерывно), интегрировать
произведение сигнала
дискретно (или непрерывно), интегрировать
произведение сигнала![]() с задержанным опорным сигналом
с задержанным опорным сигналом![]() .
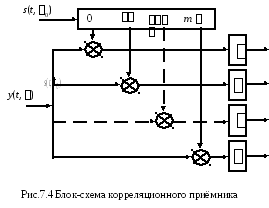
На рисунке 7.4 представлена блок-схема
корреляционного приёмника. Весь интервал
наблюдения
.
На рисунке 7.4 представлена блок-схема
корреляционного приёмника. Весь интервал
наблюдения![]() разбивается на отрезки с шагом
разбивается на отрезки с шагом![]() .
Опорный сигнал последовательно
задерживается на величину
.
Опорный сигнал последовательно
задерживается на величину![]()
![]() ,
подается на перемножающее устройство
и затем интегрируется. Решение о величине
задержки принимается по наибольшему
значению выходного сигнала одного из
интеграторов. Так как задержка
,
подается на перемножающее устройство
и затем интегрируется. Решение о величине
задержки принимается по наибольшему
значению выходного сигнала одного из
интеграторов. Так как задержка![]() регулируемая, то известен номер
интегратора, с которого снимается
наибольшее значение корреляционного
интеграла
регулируемая, то известен номер
интегратора, с которого снимается
наибольшее значение корреляционного
интеграла![]() и в качестве оценки временного положения
сигнала принимается
и в качестве оценки временного положения
сигнала принимается![]() .
Погрешность в определении
.
Погрешность в определении![]() равна
равна![]() .
.
7.3.2 Согласованный фильтр
Приемник,
оценивающий время задержки сигнала,
можно реализовать при помощи устройства,
импульсная характеристика, которого
имеет специальную форму. Пусть задан
сигнал
![]() .Согласованным
фильтром
будем называть устройство, имеющее
импульсную характеристику вида.
.Согласованным
фильтром
будем называть устройство, имеющее
импульсную характеристику вида.
![]() ,
(7.18)
,
(7.18)
где
![]() — постоянная величина.
— постоянная величина.
В качестве иллюстрации рассмотрим сигнал, (Рис. 7.5 а)
Приемник,
оценивающий время задержки сигнала,
можно реализовать при помощи устройства,
импульсная характеристика, которого
имеет специальную форму. Пусть задан
сигнал
![]() .Согласованным
фильтром
будем называть устройство, имеющее
импульсную характеристику вида.
.Согласованным
фильтром
будем называть устройство, имеющее
импульсную характеристику вида.
![]() ,
(7.18)
,
(7.18)
г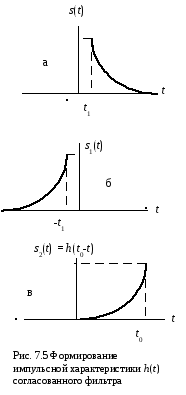 де
де![]() — постоянная величина.
— постоянная величина.
В качестве иллюстрации рассмотрим сигнал, (Рис. 7.5 а)
Зеркальное
отображение этого сигнала представлено
на рисунке 7.6б,
![]() .
Сдвинем этот сигнал на величину
.
Сдвинем этот сигнал на величину![]() ,
(Рис.7.5в),
,
(Рис.7.5в),
![]() .
Получили сигнал, являющийся зеркальным
отображением исходного сигнала
.
Получили сигнал, являющийся зеркальным
отображением исходного сигнала![]() и задержанного на время
и задержанного на время![]() .
Если импульсная характеристика приемника
пропорциональна сигналу
.
Если импульсная характеристика приемника
пропорциональна сигналу![]() ,
то такой приёмник называется согласованным
фильтром.
,
то такой приёмник называется согласованным
фильтром.
Основные вопросы, возникающие при анализе согласованного фильтра:
1)определение частотной и фазовой характеристики согласованного фильтра,
2) физика работы согласованного фильтра,
3) отношение сигнал/шум на выходе согласованного фильтра
4) оптимальность согласованного фильтра
Частотная характеристика согласованного фильтра имеет вид


![]() (7.19)
(7.19)
Но частотная характеристика линейного устройства может быть представлена как
![]() .
(7.20)
.
(7.20)
Из сравнения выражений (7.19) и (7.20) следует
![]()
![]() ,
,
![]() . (7.21)
. (7.21)
Таким
образом, амплитудно-частотная
характеристика согласованного фильтра
совпадает по форме с АЧХ сигнала, а
фазо-частотная характеристика (ФЧХ)
![]() должна иметь противоположный знак по
отношению к фазово-частотной характеристике
должна иметь противоположный знак по
отношению к фазово-частотной характеристике![]() сигнала
сигнала![]() ,
в то же время все составляющие задержаны
на величину
,
в то же время все составляющие задержаны
на величину![]() .
.
Как видно из выражения (7.21), АЧХ согласованного фильтра пропорциональна АЧХ сигнала. Поэтому согласованный фильтр называют фильтром согласованным по полосе частот с сигналом.
Выходной
сигнал
![]() фильтра имеет вид
фильтра имеет вид


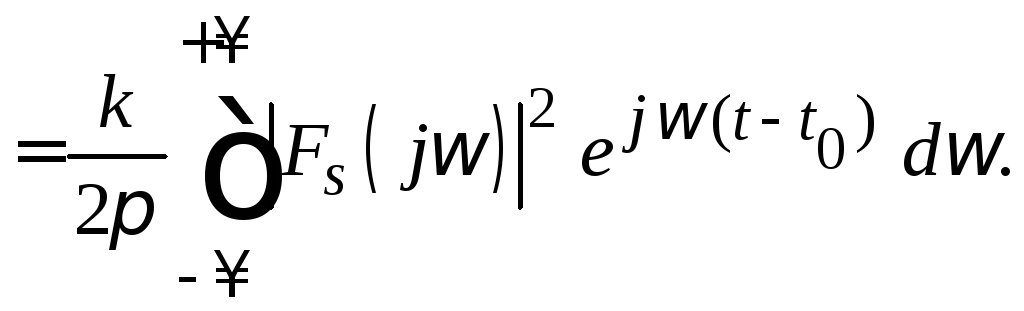 (7.22)
(7.22)
Из
этого выражения видно, что фазо-частотная
характеристика согласованного фильтра
компенсирует взаимные фазовые сдвиги
составляющих входного сигнала
![]() .
В момент времени
.
В момент времени![]() сигнал на выходе согласованного фильтра
достигает максимальное значение
сигнал на выходе согласованного фильтра
достигает максимальное значение![]() .
Это получается за счёт того, что все
составляющие входного сигнала
задерживаются пропорционально их
частоте на угол
.
Это получается за счёт того, что все
составляющие входного сигнала
задерживаются пропорционально их
частоте на угол![]() и к моменту времени
и к моменту времени![]() они все находятся в фазе и, складываясь,
дают максимальный вклад в выходной
сигнал. При
они все находятся в фазе и, складываясь,
дают максимальный вклад в выходной
сигнал. При![]() или
или![]() фазовые соотношения нарушаются и
абсолютное значение выходного сигнала
уменьшается.
фазовые соотношения нарушаются и
абсолютное значение выходного сигнала
уменьшается.
Шум, который поступает на фильтр, также усиливается на частотах, которые лежат в области спектра сигнала. Для шума необходимо рассмотреть его дисперсию (мощность) на выходе:
![]() ,
,
 .
.
Если
шум – белый, то
![]() ,
,
 .
.
Для согласованного фильтра имеем
![]() ,
,
 .
.
Отсюда отношение сигнал/шум на выходе фильтра будет
 .
.
Среди всех линейных фильтров, согласованный фильтр даёт наибольшее отношение сигнал/шум. Для произвольного фильтра имеем

≤
Знак
равенства достигается только тогда,
когда
![]() .
Из приведённой выше импульсной
характеристики видно, что АЧХ и ФЧХ
согласованного фильтра определяются
видом сигнала, то есть его АЧХ и ФЧХ. В
результате этого расчёта возникают два
вопроса: можно ли физически реализовать
согласованный фильтр и можно ли выполнить
это технически?
.
Из приведённой выше импульсной
характеристики видно, что АЧХ и ФЧХ
согласованного фильтра определяются
видом сигнала, то есть его АЧХ и ФЧХ. В
результате этого расчёта возникают два
вопроса: можно ли физически реализовать
согласованный фильтр и можно ли выполнить
это технически?
Ограничения в первом случае накладываются принципом физической реализуемости во временной и частотной области, т.е. должны выполняться условия
 или
или
Техническая реализация зависит от уровня развития технологии производства. В настоящее время существуют согласованные фильтры, реализованные на ультразвуковых линиях задержки.
Пример 7.1 Согласованный фильтр применяется часто для оценки фазы и частоты сигнала. Произведем оценку нижней границы дисперсии фазы и частоты по неравенству Рао-Крамера. Для оценки нижней границы дисперсии используем формулу (6.15)
 ,
(П 7.1)
,
(П 7.1)
где
 .
.
Ввиду
того, что время интегрирования
![]() значительно больше постоянной времени
интегрирующей цепи, оценки фазы и частоты
будут состоятельными и несмещёнными,
т. е.
значительно больше постоянной времени
интегрирующей цепи, оценки фазы и частоты
будут состоятельными и несмещёнными,
т. е.![]() .
Вычислим вторую производную по параметру
от сигнальной функции:
.
Вычислим вторую производную по параметру
от сигнальной функции:
 =
=
= .
.
Учитывая,
что выражениями
 и
и при большом времени интегрирования
можно пренебречь, получим
при большом времени интегрирования
можно пренебречь, получим
 .
.
Размерность
величин, входящих в формулу –
 .
Таким образом, вторая производная от
сигнальной функции при
.
Таким образом, вторая производная от
сигнальной функции при![]() имеет значение
имеет значение и размерность
и размерность .
Подставив полученные выражения в
неравенство (П 7.1), получим нижнюю границу
дисперсии оценки фазы
.
Подставив полученные выражения в
неравенство (П 7.1), получим нижнюю границу
дисперсии оценки фазы
 [рад2].
[рад2].
Проделав
те же операции по оценке нижней границы
дисперсии частоты, что и при оценке
фазы, получим вторую производную по
параметру
![]() от сигнальной функции в точке
от сигнальной функции в точке![]() ,
равную
,
равную
 =
=
=

 .
.
Используя это приближение, получим оценку нижней границы дисперсии частоты, равную
 ,
,
 .
.
Из
сравнения нижних границ оценок дисперсий
фазы и частоты видно, что нижняя граница
оценки дисперсии частоты убывает как
![]() ,
в то время для фазы – как
,
в то время для фазы – как![]() .
Это означает, что при равных условиях
погрешность измерения частоты будет
меньше, чем погрешность измерения фазы.
.
Это означает, что при равных условиях
погрешность измерения частоты будет
меньше, чем погрешность измерения фазы.