

5.4 Подбор электродвигателя
Исходными данными для подбора модели электродвигателя является приводящая мощность, развиваемая насосом. Основой для расчета приводящей мощности служат следующие исходные данные:
- рабочий объем насоса V0, V0 = 160 см3;
- номинальная подача Qном, Qном = 135 л/мин;
![]() ;
;
- рабочее давление насоса Pн, Pн = 6,3 МПа.
Удельный рабочий объем насоса:
![]() . (5.9)
. (5.9)
![]() .
.
Крутящий момент на валу насоса:
![]() , (5.10)
, (5.10)
где ![]() - механический КПД насоса,
= 0,89;
- механический КПД насоса,
= 0,89;
Pн – рабочее давление насоса.
![]() .
.
Скорость вращения приводного вала:
![]() , (5.11)
, (5.11)
где ![]() - объемный КПД насоса,
= 0,88.
- объемный КПД насоса,
= 0,88.
![]() .
.
Приводящая мощность:
![]() . (5.12)
. (5.12)
![]() .
.
Согласно полученным значениям расчета можно подобрать электродвигатель. Требованиям проведенных расчетов удовлетворяет электродвигатель АИР100S4 ТУ16-525.564-84.
5.5 Технологический расчет гидравлического подъемника
5.5.1 Определение диаметров гидроцилиндров.
Диаметр первого гидроцилиндра подъемного устройства
D=120 мм
Толщина стенки гидроцилиндра
t=рD/(2[σ]) (5.13)
t=5,6*120/(2*180) = 1,9 мм
где t — толщина стенки гидроцилиндра, мм; [σ] — допускаемое напряжение в стенках гидроцилиндра, МПа; [σ] = σ T/n.
Для цилиндра из стали 45 σ T = 360 МПа. Коэффициент запаса прочности принимают n=2.
Размеры диаметров выдвижных звеньев телескопических гидроцилиндров определяют, преобразуя известные выражения с учетом схемы гидроцилиндра (рис. 3) и принятых обозначений: е — межтрубный радиальный зазор, мм; ti — толщина стенки i-ro звена, мм; di— внутренний диаметр i-го звена, мм; Di — наружный (активный) диаметр i-го звена, мм; Ai; — площадь поперечного сечения i-го звена, мм2; Aк — площадь поперечного сечения корпуса гидроцилиндра, мм2; z — число звеньев гидроцилиндра.
Из приведенной схемы видно, что
di=Di-1+2e; (5.14)
Di=di+2ti, (5.15)
откуда
Di = Di-l + 2e + 2ti.
Так как ti = pdi/ (2[σ]), то
Di = Di-1 + 2e + p(Di-l + 2e)/[σ];
Di=(Di-l + 2e)(1+p/[σ]).
Примем
1 +p/[σ] = k = 1+5,60/180=1,031,
тогда
Di=(Di-1 + 2e)k, (5.16)
следовательно,
D2= (Dl + 2e)k = D1k + 2ek;
D3= (D2+2e)k=[(Dl + 2e)k+2e]k= D1k2 + 2ek2 + 2ek = D1k2 + 2e(k2 + k),
где D—диаметр наименьшего (выдвижного) звена, который находится из выражения A = F/p:
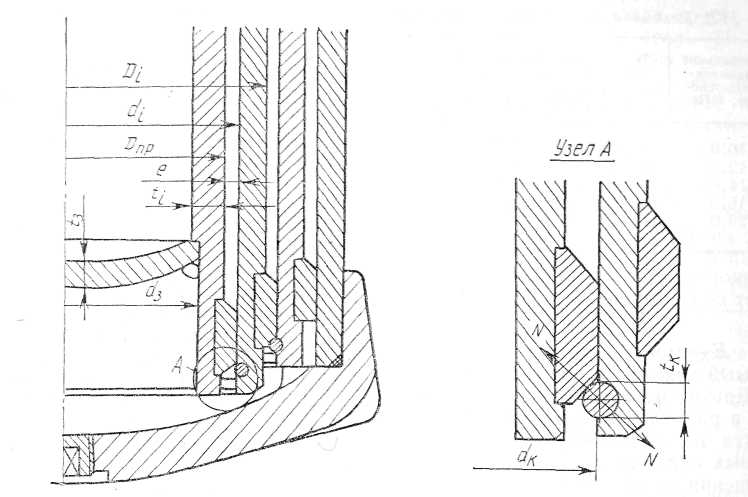
Рисунок 5.7 - Схема к расчету основных размеров деталей
гидроподъемника телескопического типа
Dl = [4F/(πp)]1/2 = 1,128(F/p)1/2.
Аналогично
D2=1,128(F/p)1/2k+ 2ek = 1,128*(78000/5,6)1/2*1,031+2*3,5*1,031=
=137,25+7,22=131,94;
D3=1,128(F/p)1/2k2+ 2e(k2 + k)=1,128*(78000/5,6)1/2*1,0312+
+2*3,5*1,0312+1,031=143.
Таким образом,
D
= 1,128 (F/p)1/2
kz-l
+2e
![]() (5.17)
(5.17)
Полученное выражение позволяет определять диаметр любого выдвижного звена телескопического гидроцилиндра в зависимости от необходимого усилия при выдвижении звена наименьшего диаметра, реализуемого давления в гидросистеме и материала гидроцилиндра.
При проектировании телескопических гидроцилиндров рекомендуется принимать межтрубный радиальный зазор е≈3,5 мм.
После определения диаметров звеньев гидроцилиндров каждой ступени по приведенной методике их значения рекомендуется принимать из рядов диаметров, предусмотренных стандартами.
Для гидроподъемников большой длины, сверхтяжелых целесообразно рассчитывать деформацию стенок цилиндров в радиальном направлении, возникающую от давления рабочей жидкости. Эту деформацию определяют по формуле
Δd = dвнσT/E, (5.18)
где Е — модуль упругости, принимаемый для стали равным 2,1*105МПа.
Δd1 = 120*360/2,1*105=0,206 мм,
Δd2 = 132*360/2,1*105=0,223 мм,
Δd3 = 143*360/2,1*105=0,247 мм,
Допустимая деформация Δd стенок в радиальном направлении назначается из условия предотвращения их заклинивания: Δd < Δdmin, где Δdmin — минимальный зазор в сопряжении, Δdmin =3,5 мм.
Выдвижение всех ступеней гидроподъемника должно быть примерно одинаковым, поскольку такой гидроподъемник будет наиболее компактен.
Определение вместимости масляного бака гидросистемы и сечений трубопроводов. Необходимая вместимость масляного бака гидросистемы
Vб=l,5(Vmax+VT), (5.19)
где Vт — вместимость трубопроводов, шлангов, насоса и вспомогательных агрегатов гидросистемы.
Vб=l,5(Vmax+VT)=1,5*(8,13+0,419)=13,45 л.
Вместимость масляного бака должна превышать полную вместимость гидросистемы не менее чем в полтора раза для компенсации утечек рабочей жидкости и сохранения в баке определенного уровня жидкости над отверстиями подводящих и отводящих трубопроводов, исключения возможности вспенивания масла и смешения его с воздухом. Металлические нагнетательные трубопроводы высокого давления рассчитывают по формуле
pR/δ≤[σ] (5.20)
где р — максимальное давление в трубопроводе (соответствует давлению, на которое отрегулирован предохранительный клапан гидроподъемника), МПа; R — средний радиус трубы; δ — толщина стенки трубы.
Обычно для трубопроводов из стали принимают допускаемое напряжение не более 40...60 МПа, а из латуни — не более 25 МПа.
5,60*6/1≤40
33,6≤40 – условие выполняется.
Шланги высокого давления изготовляются с использованием резиновых рукавов высокого давления с металлическими оплетками.