

Разработка модели- «Палец»:
1. Создаю новый документ. Выбираем «Деталь»
Деталь винт представляет собой тело вращения, соответственно большую часть модели можно получить двумя способами либо строим эскиз смещенный относительно оси и далее при помощи операции вращения получаем готовую деталь. Я пошел по второму пути:
2.
Выбираю плоскость XY
и нажимаю «Эскиз»
![]() на панели свойств.
на панели свойств.
3. Строю эскиз
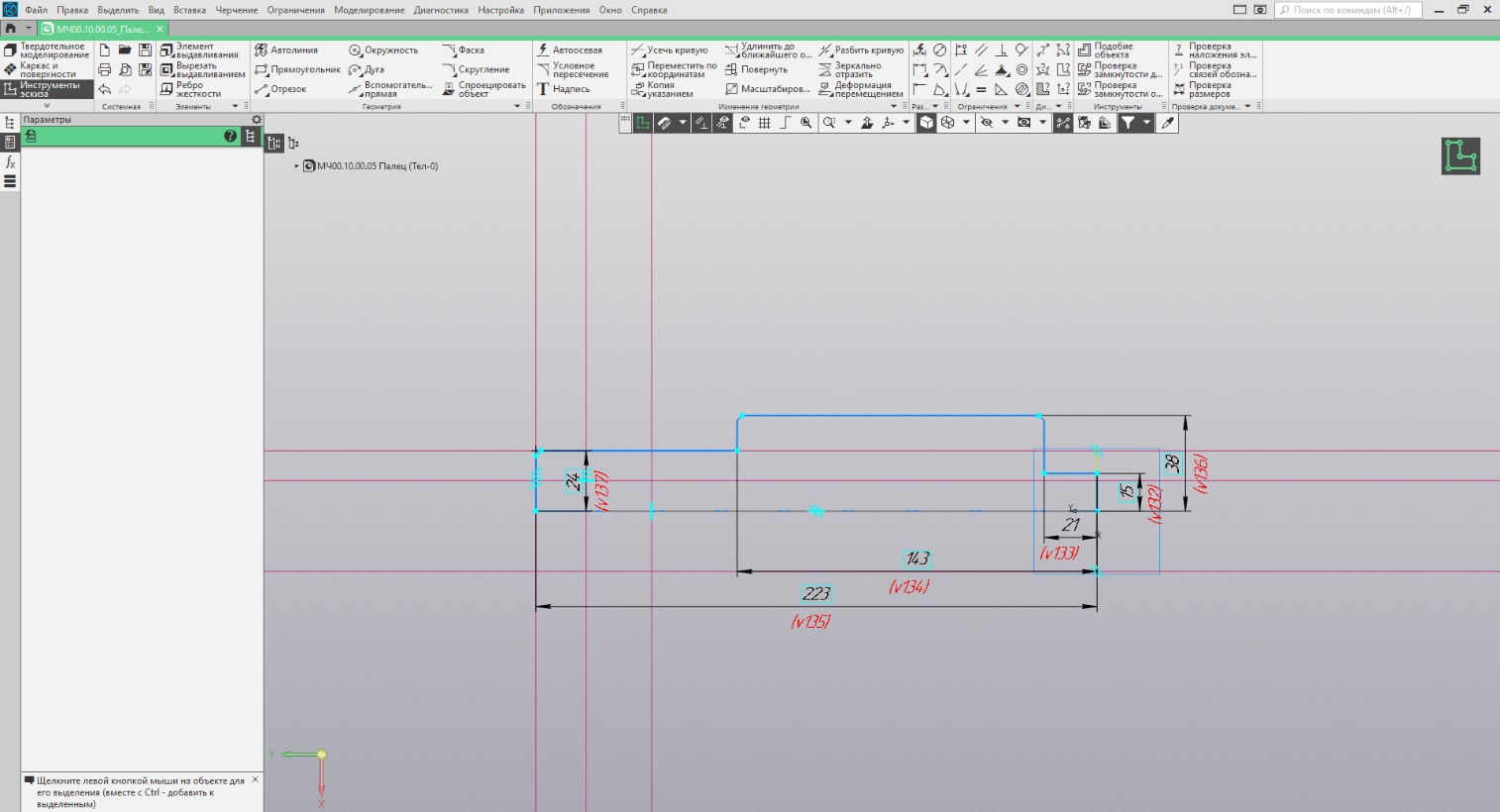
Рисунок 29 – Эскиз пальца.
4. Используя команду выдавливание вращением, получаю модель пальца.

Рисунок 30 – Предварительный вид пальца.
5 . Далее строю бобышку по эскизу.

Рисунок 31 –эскиз бобышки.
6. Предварительный вид бобышки представлена на рис. 32.

Рисунок 32 – бобышка
8. Условное обозначение резьбы на рис. 33.

Рисунок 33 – бобышка
7 . Далее по ГОСТ 23360-78 зная размер посадочного диаметры нахожу размеры шпонки и через операцию вырез выдавливанием получаю шпоночный паз.

Рисунок 34 –Вспомогательная плоскость

Рисунок 35 –Эскиз шпоночного паза

Рисунок 36 –Шпоночный паз
Модель детали «Палец» готова!
Для построения прокладок используемых для герметизации соединений:

1. Создаю новый документ. Выбираем «Деталь»
2. Выбираю плоскость ZX и нажимаю «Эскиз» на панели свойств.
3. Строю прямоугольник с заданными диаметрами и толщиной (рис. 33) .

Рисунок 33- Эскиз
4. Применяю команду выдавливания вращением, получаю модель будущей детали. Далее вычерчиваю эскиз отверстий под болты и выбираю операцию вырез выдавливанием. Модель прокладки показана на рис. 34.


Рисунок 34- Модель прокладка
4. Создание 3d- сборки «зажим гидравлический поворотный»
По созданным моделям деталей создаем сборку узла.
Для этого из начального меню «Компас» вбираем новый документ: «Сборка», показано на рис.35.

Рисунок 35- Выбор нового документа «Сборка»
В открывшемся документе при помощи команды «Добавить из файла»:

Выбираем модель, размещаем ее в окне сборки, выбрав нужную нам плоскость, в моем случае модель размещена в плоскости ZX , кликаю мышью в центре пересечения осей координат, рис. 36.

Рисунок 36-размещение первой детали сборки.
Разместив модель ,закрепляем при помощи команды «создать обьект»

Деталь размещена точно в центре пересечения осей
Используя команду «Добавить из файла», добавляем остальные модели входящие в состав сборки, рис. 37.

Рисунок 37-Добавление деталей из файла
Используя команды «переместить компонент» и «повернуть компонент» перемещаем модели на сборке согласно их мест расположения – рис. 37.
Для размещения деталей сборки согласно мест сопряжения активируем инструментальную панель «сопряжения»:

В ней выбираем команду
Применение данной команды позволит разместить сопрягаемые детали соосно друг относительно друга-рисунок 32,33. Для этого указываем на поверхность деталей расположенных в одной плоскости:

Рисунок 32 –Установление соосности, выбор первой оси

Рисунок 33- Установление соосности, выбор второй оси
В результате модели размещаются на одной оси относительно друг друга. В дальнейшем детали будут перемещаться и вращаться только вдоль оси .
Аналогично размещаем оставшиеся модели.
Для точного указания взаимного положения компонентов определяем сопряжения между гранями, ребрами и вершинами компонентов. В КОМПАС-3D предусмотрены следующие типы сопряжений:
совпадение;
параллельность;
перпендикулярность;
на расстоянии;
под углом;
концентричность;
касательность.
Используя команду:

Соединяем разъемные соединения на местах их посадок, для этого также курсором указываем на посадочные поверхности двух деталей, рис.34.


Рисунок 34-Выбор посадочных поверхностей
Производим эти действия для всех сопрягаемых моделей, в результате получаем сборочный узел – рис. 35.

Рисунок 35-Сборочный узел
В данной сборке отсутствуют стандартные крепежные элементы, используя «менеджер библиотек»-рисунок 36
Выбираем стандартные изделия –вставить элемент – крепежные изделия и ГОСТ (рисунок 36) согласно которому будет отображаться тот или иной элемент , поочередно размещаем стандартные изделия на сборке, указывая поверхности и оси относительно которых будет размещен элемент, для левой кнопкой мыши кликаем поочередно по поверхности, рис 36.

Рисунок 36-Менеджер библиотек
Далее устанавливаем крепежные элементы по концентрической сетке.

Рисунок 37-размещение стандартных изделий по концентрической сетке.
Выполнив все указания используя все команды, описанные выше мы получили сборочный узел «Ролик поддерживающий» (рис. 38) из моделей в формате 3D!

Рисунок 39- Сборочный узел в сборе