

4 Расчёт опорных реакций, статической и динамической грузоподъёмности подшипников и изгибающих моментов вала
4.1. Подготовка исходных данных.
Программа составлена для расчёта двухопорного вала на подшипниках при схемах нагружения, представленных в таблице 3.1 [1]. Расположение внешних сил P и Q относительно опор вала выявляется в процессе выполнения чертежа развёртки привода. Направление сил P и Q определяется из чертежа поперечного разреза привода или схемы свёртки валов, выполненной в масштабе для кинематической цепи привода, по которой передаётся полная мощность.
Результирующие силы на зубьях передач эвольвентного двадцатиградусного зацепления, действующие на вал, рассчитываются по формулам:
 ;
;
 .
.
Окружные составляющие P0 и Q0 (Н) определяются по крутящему моменту МКР (Н∙м) на валу и начальным диаметрам колёс dW (мм).
4.2. Методика расчёта по программе OPORA 1.
4.2.1. По силам P и Q определяются опорные реакции. Опорные реакции от силы Р в плоскости действия этой силы:
 ;
;
 .
.
Опорные реакции от силы Q:
 ;
;
 .
.
Результирующие реакции в левой и правой опорах:
 ;
;
 ,
,
где
 - угол между плоскостями действия сил
P и Q, град, находится в пределах от 0° до
360° и определяется из схемы свёртки
привода.
- угол между плоскостями действия сил
P и Q, град, находится в пределах от 0° до
360° и определяется из схемы свёртки
привода.
4.2.2. Подшипники выбираются по допускаемой динамической и статической грузоподъёмности с учётом посадочных размеров.
Статическая грузоподъёмность подшипников С0 принимается по величинам опорных реакций; для левой опоры С01 = R; а для правой С02 = S.
Динамическая грузоподъёмность подшипников левой и правой опор рассчитывается по формулам:
 ;
;
 ,
,
где,
 - коэффициент безопасности, равный 1,2
для учёта перегрузки;
- коэффициент безопасности, равный 1,2
для учёта перегрузки;
 -
отношение динамической грузоподъёмности
к эквивалентной динамической нагрузке.
-
отношение динамической грузоподъёмности
к эквивалентной динамической нагрузке.
Это отношение берётся из таблицы 3.2 [1], данные которой выражены в регрессивной зависимости:
 ,
,
где n – частота вращения вала, мин-1.
4.2.3. Изгибающие моменты вала М (Н∙м) в сечениях действия внешних сил или реакций по общей формуле:
 ,
,
где,
 - сила или реакция опоры, Н;
- сила или реакция опоры, Н;
 -
плечо действия силы или реакции, мм.
-
плечо действия силы или реакции, мм.
Положение сечения, в котором действует искомый изгибающий момент, определяется координатой Х, измеряемой от силы или реакции, действующих на левом конце вала (условно можно назвать от левого конца вала). Координаты Х и соответствующие выражения изгибающих моментов для схем нагружения вала, предусмотренных программой, приведены в таблице 3.1 [1].
4.3. Для получения исходных данных необходимо определить результирующие силы на зубьях передач.
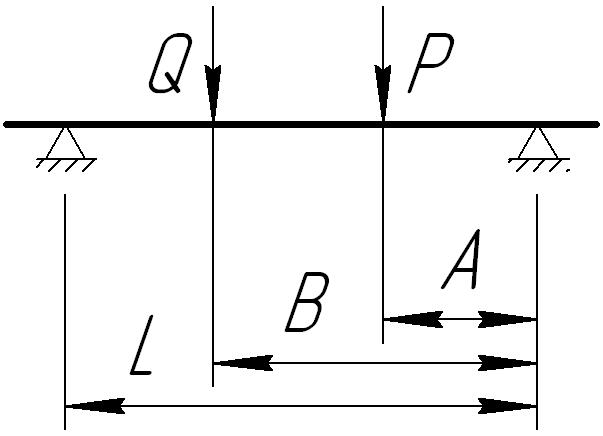
В п. 3.3.1. и в п. 3.3.3. действует схема нагружения, представленная на рисунке 10.1, в п. 3.3.2. действует схема, представленная на рисунке 10.2.
Рисунок 10.1
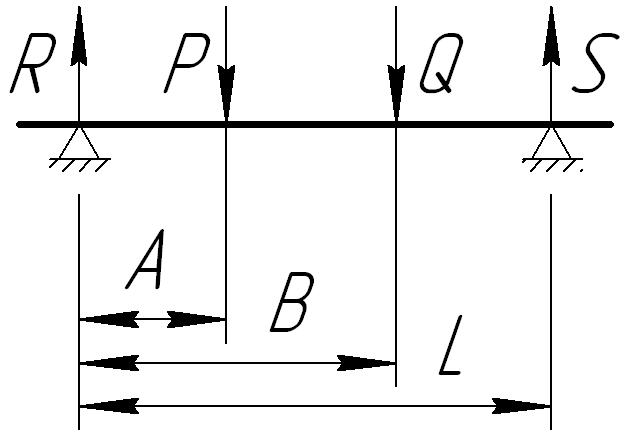
Рисунок 10.2
4.3.1. Для вала I.
 ;
;
 .
.
Расстояние от левой опоры вала А=27 мм, расстояние от левой опоры вала В=77,5 мм. Расстояние между опорами равно L=421,5 мм. Частота вращения вала N=1000 мин-1.
Получаем максимальную динамическую грузоподъёмность подшипников 17358,84.
По результатам расчёта выбираем радиально – упорные шарикоподшипники 46305 ГОСТ 831-75 с Сr = 22 кН и внутренним диаметром d = 35 мм.
4.3.2. Для вала II.
 ;
;
 .
.
Расстояние от левой опоры вала А=344 мм, расстояние от левой опоры вала В=397,25 мм. Расстояние между опорами равно L=421,5 мм. Частота вращения вала N=355 мин-1.
Получаем максимальную динамическую грузоподъёмность подшипников 18714,75 Н.
По результатам расчёта выбираем радиально – упорные шарикоподшипники 46305 ГОСТ 831-75 с Сr = 22 кН и внутренним диаметром d = 35 мм.
4.3.3. Для вала III.
 ;
;
 .
.
Расстояние от левой опоры вала А=24,25 мм, расстояние от левой опоры вала В=269,5 мм. Расстояние между опорами равно L=421,5 мм. Частота вращения вала N=250 мин-1.
Получаем максимальную динамическую грузоподъёмность подшипников 20141,09 Н.
По результатам расчёта выбираем радиально – упорные шарикоподшипники 46305 ГОСТ 831-75 с Сr = 22 кН и внутренним диаметром d = 35 мм.