

2.13. Компоновка грузовой тележки
Расположение механизмов на грузовой тележке должно обеспечивать её минимальные габариты и массу, равномерную нагрузку на ходовые колёса при номинальном грузе на крюке.
На данном рисунке представлено компонование тележки мостового крана:

 ;
;

Координаты
центра тяжести равны:
 ;
;

Координаты
положения крюковой подвески равны:
 ;
;
 .
.
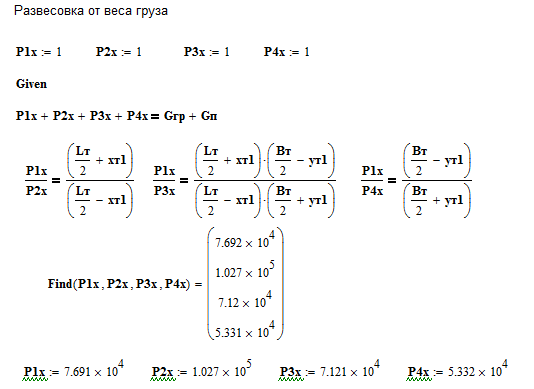
Произведём расчёты с помощью программы Mathcad:



3. Механизм передвижения крана
3.1. Выбор кинематической схемы механизма
В мостовых кранах возможны два механизма передвижения: с раздельным или центральным приводом. В механизмах передвижения двухбалочных мостовых кранов общего назначения с пролетом более 16 м применяют только раздельный привод (рис. 18). Он легок и удобен в изготовлении и монтаже. Однако при раздельном приводе несинхронность движения сторон крана больше, чем при центральном. На этой схеме каждая концевая балка моста имеет самостоятельный привод, причём приводы связаны только металлоконструкцией крана.

Рис. 18. Кинематическая схема механизма передвижения крана.
1 – колесо ходовое, 2- редуктор, 3 - тормоз, 4 – муфта, 5 – электродвигатель.
Ходовые колеса, соединенные с приводом, являются приводными, а остальные колеса – холостыми.
3.2. Статическая нагрузка на ходовые колёса
Используя расчётную схему(рис. 19) определим нагрузки на ходовые колёса крана.

Ри.19. Расчётная схема для определения нагрузок на колёса крана
Составим уравнение моментов относительно левой точки опоры крана и найдём максимальную нагрузку на правые колёса крана:
 ,
,
где
 -
вес тележки;
-
вес тележки;
 -
вес груза;
-
вес груза;
 -
вес кабины;
-
вес кабины;
 -
вес крана;
-
вес крана;
 -
вес моста;
-
вес моста;
 -
пролёт крана;
-
пролёт крана;
 ;
;
 ;
;
 .
.
Выразим
 :
:

Нагрузка на одно колесо составляет:

 Зная
максимальную статическую нагрузку на
одно приводное колесо, определяем
диаметр колеса и тип рельса [2, т.2,
табл.V.2.47]
.
Зная
максимальную статическую нагрузку на
одно приводное колесо, определяем
диаметр колеса и тип рельса [2, т.2,
табл.V.2.47]
.
При
 от 50 до 100 кН:
от 50 до 100 кН:
 -
диаметр дорожки катания колеса;
-
диаметр дорожки катания колеса;
 (ГОСТ
4121-76) - тип рельса.
(ГОСТ
4121-76) - тип рельса.
3.3. Сопротивление передвижению крана
Сопротивление передвижению крана с номинальным грузом WСT,Н, при установившемся режиме работы равно:
 ,
Н,
,
Н,
- коэффициент трения в опоре вала колеса, таблица 2.14 [1,стр.40];
 - коэффициент
трения качения колеса по рельсу, таблица
2.13[1,стр.40];
- коэффициент
трения качения колеса по рельсу, таблица
2.13[1,стр.40];
Кр = 1,5 – коэффициент реборд, определяемый в основном трением реборд о головку рельса, и трением элементов токосъемного устройства, таблица 2.15[1,стр.41];
- диаметр цапфы колеса [2, т.2, табл.V.2.43];
Wукл – сопротивление, создаваемое уклоном подкранового пути:

α – уклон рельсового пути для крана [1, стр.41];
Сопротивление передвижению крана равно:

3.4. Выбор электродвигателя
Двигатель механизма передвижения обычно выбирается серии МТКF, МТН таким образом, чтобы отсутствовала пробуксовка ведущих колес разгруженного крана, а коэффициент запаса сцепления должен быть не менее 1,2.
Мощность двигателя NCT, кВт, равна

где - сопротивление передвижению;
VT = 1,34 м/с – заданная скорость передвижения крана;
=0,85 – общий к.п.д. механизма передвижения[2, т.2, стр.423].
Для рассчитанной мощности NСТ по каталогу выбираем двигатель типа MTН 311-6 (рис.20), с учетом заданной группы режима работы М6 (а значит, и соответствующей относительной продолжительности включения ПВ = 40%). Данные приведены в табл. 16 и 17.
Рис. 20 Электродвигатель MTН с фазным ротором на лапках
 Основные
технические данные электродвигателя
MTН
311-6
Основные
технические данные электродвигателя
MTН
311-6
Таблица 16.
Тип двигателя |
Мощность на валу , кВт (ПВ=40%) |
n, об/мин |
КПД, % |
Mmax, H∙м |
Момент инерции, кг∙м2 |
Масса, кг |
MTН 311-6 |
11 |
940 |
78 |
314 |
0,225 |
170 |
Основные параметры и размеры электродвигателя MTН 311, мм.
Таблица 17.
Тип двигателя |
b1 |
b10 |
b11 |
b12 |
b31 |
d1 |
d10 |
d20 |
d22 |
d24 |
d25 |
h |
h3 |
h31 |
||
MTН |
14 |
280 |
350 |
75 |
176 |
50 |
24 |
300 |
18 |
350 |
250 |
180 |
53,5 |
444 |
||
l1 |
l3 |
l10 |
l11 |
l12 |
l20 |
l28 |
l30 |
l31 |
l33 |
n |
l*36 |
l36 |
Концы валов |
|
|||
110 |
- |
260 |
320 |
80 |
5 |
224 |
748 |
155 |
860 |
8 |
742 |
771,5 |
Цилиндрические |
||||