

1.2) строим вектор ускорения aS2 из мгновенного центра ускорений Pa в точку d;
1.3) находим ускорение аS2 =Kа ·Pа d и полученные данные записываем в таблицу 4;
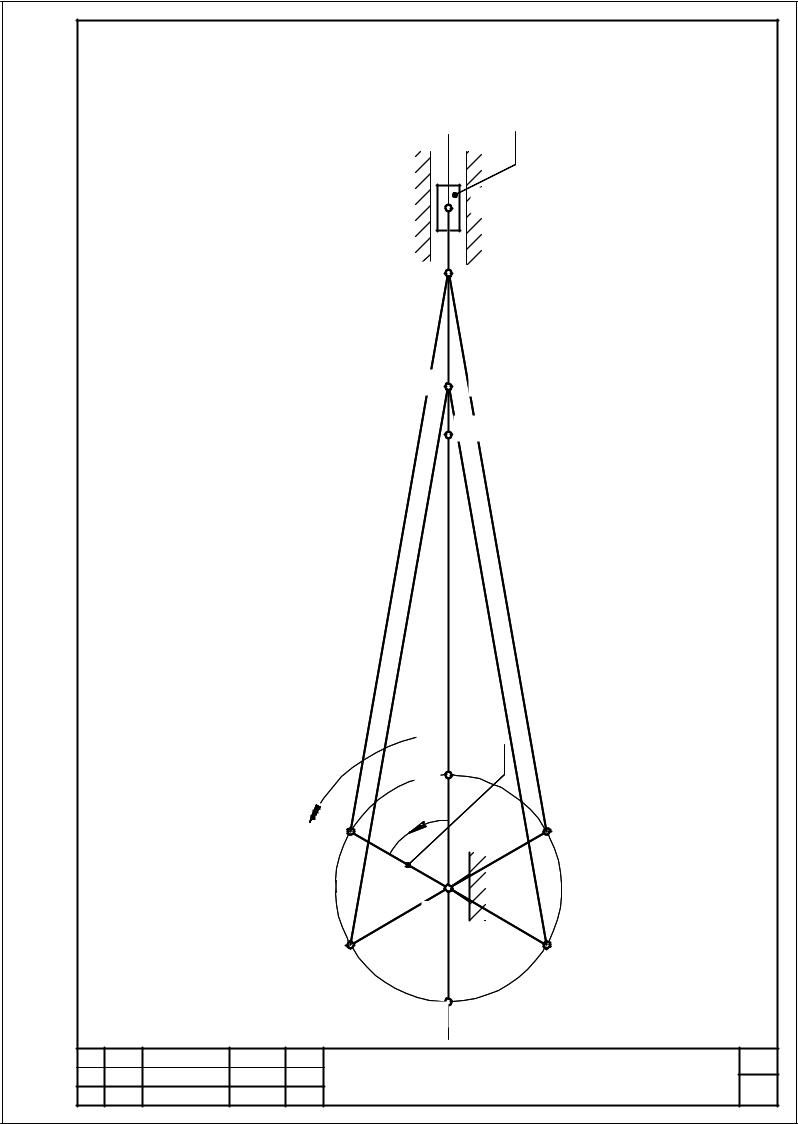
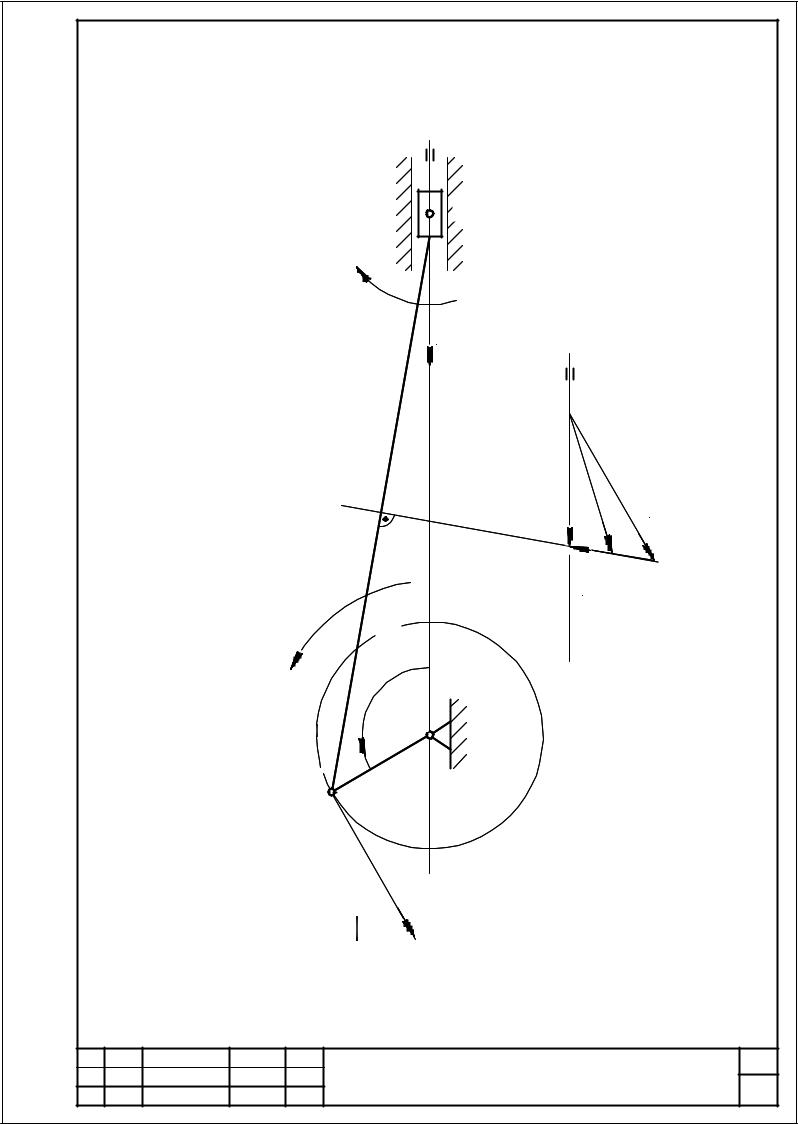
2)Для каждого положения ползуна строим схемы группы стойка-кривошип и шатун-ползун в масшабе
3)Определяем инерционные нагрузки:
3.1) для кривошипа сила инерции и момент инерции равны нулю, так как движение кривошипа равномерное;
3.2) для шатуна сила инерции F2 =m2 ·аS2 ; момент силы инерции
M2 =JS2 ·ε2 ; момент инерции JS2 =121·m2 ·(AB) 2=121·2,5 кг·(0,1 м) 2=
=0,0422 кг·м 2.
3.3) для ползуна сила инерции F3 =m3 ·aB .
3.4) Полученные значения записываем в таблицу 4.
4) Определяем силу тяжести каждого элемента и прикладываем ее к центру тяжести:
для ползуна G3 =m3 ·g=2 кг·9,8 м/с 2=19,62 Н; для шатуна G2 =m2 ·g=2,5 кг·9,8 м/с 2=24,5 Н;
для кривошипа G1 =m1 ·g=0,14 кг·9,8 м/с 2=1,37 Н.
Силы тяжести элементов механизма не учитываем в расчете вследствии малости значений в сравнении с силами инерции.
5) Определяем кинетостатическим способом неизвестные реакции в кинематических парах механизма. Уравнения кинетостатического равновесия: SFi +SFui =0; SMi +SMui =0, где Fi и Mi - соответственно
внешние силы и моменты внешних сил, приложенные к звеньям механизма; где Fui и Mui - соответственно инерционные силы и
моменты сил инерции, приложенные к звеньям механизма.
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
11 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|

5.1) Найдем реакцию R12t , для чего составим уравнение моментов относительно точки В: SМВ =0.
R12t ·AB+F2 ·плечо-M2 =0.
5.2) Найдем реакции R12n и R03 , для чего строим векторное уравнение:
R12n +R12t +F2 +Q+F3 +R03 =0.
5.3) Найдем реакцию R12 =R12n +R12t .
5.4) Найдем внутреннюю реакцию R23 , для чего необходимо построить векторное уравнение (сумма сил, действующих на шатун):
R12 +F2 +R23 =0.
5.5) Для нахождения реакции R01 записываем уравнение сил в векторном виде для кривошипа:
R21 +R01 =0, где R21 =-R12 . Или R01 =R12 .
5.6) Полученные значения вносим в таблицу 5.
6) Найдем значение уравновешивающего момента Тур =hур ·R21 . Полученные значения вносим в таблицу 5.
Построим планы сил для шести вышеобозначенных положений ползуна (Приложение 4, листы 31-36).
Н
Коэффициент масштаба плана сил Кf =130мм .
Таблица 4.
№ |
aS2 |
, м/с |
2 |
F2 , Н |
М2 , Н·м |
F3 , Н |
положения |
|
|||||
2 |
7323 |
|
3800 |
760 |
3750 |
|
4 |
6281 |
|
3741 |
720 |
3613 |
|
5 |
6556 |
|
3726 |
711 |
3632 |
|
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
12 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|

Таблица 5.
№ |
R01 , Н |
R12 , Н |
R23 , Н |
R03 , Н |
Тур , Н·м |
положения |
|||||
2 |
17275 |
17625 |
12726 |
2786 |
760 |
4 |
17823 |
17822 |
12965 |
3788 |
737 |
5 |
9621 |
8726 |
8992 |
3685 |
739 |
Наибольший по модулю уравновешивающий момент
IТур Imax = 760 Н·м.
4. Кинематическийрасчетпередаточногомеханизма ПМ(Редуктора)
По заданию имеем одноступенчатый цилиндриченский редуктор, кинематическая схема которого представлена на рисунке 2.
Рисунок 2.
Кинематическая схема одноступенчатого цилиндрического редуктора.
1 3
4
 2
2
1 - входной вал;
2 - выходной вал;
3 - шестерня;
4 - зубчатое колесо.
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
13 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
Передаточное число редуктора u=3. Кроме того, u=n . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Следовательно число оборотов выходного вала |
|
|
|
|||||||||
|
n1 |
1300 об/мин |
|
|
|
|
|
|
|
|
||
n2 =u |
= |
3 |
=433,33 об/мин. |
|
|
|
|
|||||
|
Крутящий момент на выходном валу редуктора |
|
|
|
||||||||
Твых =Твх ·u=IТур Imax ·u=760 Н·м·2=1520 Н·м. |
|
|
|
|||||||||
|
Произведем расчет прямозубой зубчатой передачи редуктора. |
|
||||||||||
Примем, что материалом, из которого изготовлены шестерня и |
|
|
||||||||||
зубчатое колесо, является Сталь 45. |
|
|
|
|
||||||||
|
Предварительныйрасчет. |
|
|
|
|
|
|
|||||
|
Определим предварительное межосевое расстояние из расчета по |
|||||||||||
контактным напряжениям: |
|
|
|
|
|
|
||||||
a |
>K ·(u+1)· 3 |
T |
·10 3 |
·К , где: |
|
|
|
|
||||
вых |
|
|
|
|
|
|||||||
w |
a |
|
ψa ·u 2·[σ]H2 |
|
Нb |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Ка - вспомогательный коэффициент, для прямозубых колес Ка =49,5; |
|
|||||||||||
ψa =0,36 - коэффициент ширины венца колеса; |
|
|
|
|||||||||
[σ] =414,4 Н/мм 2- допустимое контактное напряжение; |
|
|
|
|||||||||
|
H |
|
|
|
|
|
|
|
|
|
|
|
КНb =1 - коэффициент неравномерности нагрузки по длине зуба. |
|
|
||||||||||
a |
>49,5·(2+1)· 3 |
|
1520 Н·м·10 3 |
·1=384 мм. |
|
|
|
|||||
w |
|
|
|
0,36·(2) 2·(414,4 Н/мм 2) 2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
Предварительный делительный диаметр зубчатого колеса |
|
|
|||||||||
|
2·aw ·u 2·384.4 мм·3 |
|
|
|
|
|
|
|
||||
d2 = u+1 |
= |
3+1 |
=379,2 мм. |
|
|
·10 3 |
||||||
|
|
|
|
|
|
|
|
|
2·К ·T |
|||
|
|
|
|
|
|
|
|
|
m |
вых |
|
, |
|
Определяем предварительный модуль зацепления m> d ·b ·[σ] |
|||||||||||
где: |
|
|
|
|
|
|
|
2 |
2 |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Кm =6,8 - вспомогательный коэффициент; |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
ТММ-05.00.00 |
|
|
Лист |
|
Изм. Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|
14 |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||

b2 =ψa ·aw =0,36·384 мм=144 мм - предварительная ширина венца зубчатого колеса;
[σ]F =198,8 Н/мм 2- допустимое контактное напряжение.
m> |
|
|
2·6,8·1520 Н·м·10 3 |
|
=2,97 мм. Округляем до ближайшего |
||
|
|
|
|
|
2 |
||
379,2 мм·144 мм·198,8 Н/мм |
|
|
|||||
большего по ГОСТ 9563-60 и принимаем m=4 мм (1 ряд). |
|||||||
|
Предварительное суммарное число зубьев шестерни и зубчатого |
||||||
колеса: |
|
|
|
|
|
||
|
|
2·aw |
2·384 мм |
|
|
||
z = |
|
= |
|
=289,6 |
|
|
|
m |
3 мм |
|
|
||||
S |
|
|
|
|
|||
|
|
|
|
|
|
||
Окончательныйрасчет.
Окончательно принимаем суммарное число зубьев zS =290, следовательно окончательно имеем aw =384 мм.
Окончательная ширина венца b2 =ψa ·aw =0,36·384 мм=144 мм, принимаем b2 =145 мм.
Окончательный делительный диаметр зубчатого колеса
|
2·aw ·u |
2·384 мм·3 |
|
|
|
|||
d2 = |
|
= |
3+1 |
=378 мм. |
|
|
|
|
u+1 |
2·6,8·1520 Н·м·10 3 |
|
|
|||||
Окончательный Модуль m> |
|
|
=3 мм. |
|||||
|
|
2 |
||||||
|
|
|
|
378 мм·144 мм·198,8 Н/мм |
|
|
||
Округляем до ближайшего большего по ГОСТ 9563-60 и принимаем m=3 мм (1 ряд).
Число зубьев шестерни z1 =u+1zS =2+1290=93.
Делительный диаметр шестерни d1 =m·z1 =3 мм·93=259 мм. Число зубьев зубчатого колеса z2 =zS -z1 =290-93=197.
Диаметр вершин шестерни da1 =d1 +2m=259 мм+2·3 мм=265 мм. Диаметр вершин зубчатого колеса da2 =d2 +2m=378 мм+2·3 мм=
=384 мм.
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
15 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|
Диаметр впадин шестерни df1 =d1 -2·(c+m), где с=0,25·m -
радиальный зазор пары исходных контуров. df1 =259 мм-2·(0,25·3 мм+3 мм)=251,5 мм.
Диаметр впадин зубчатого колеса df2 =d2 -2·(c+m)=
=384 мм-2·(0,25·3 мм+3 мм)=376,5 мм.
Ширина венца шестерни b1 =b2 +3 мм=103 мм+3 мм=106 мм.
Шаг зацепления P=p·m=3,14·3 мм=12,56 мм.
Толщина зуба по дуге делительной окружности
P |
12,56 мм |
||
St =2 |
= |
2 |
=6,28 мм. |
Построим схему зубчатого зацепления (Приложение 5, лист 37). Алгоритм построения.
1) Проводим из центров O1 и 02 начальные окружности, окружности
выступов и окружности впадин, обращая при этом внимание на то, чтобы начальные окружности обоих колёс имели одну общую точку касания К, лежащую на линии центров O1 -O2 .
2) Через точку К проводим под углом 20° к общей касательной начальных окружностей прямую MQ и, опустив из центров О1 и 02
на эту прямую перпендикуляры, получим точки А и В. Из центра О1 радиусом О1 А описываем основную окружность. Делим прямую KA на
равное число частей, например на три, и отметим точки деления буквами d, с и ниже точки А - b, e, f. Затем откладываем от точки А эти отрезки по дуге основной окружности; точки деления обозначаем буквами d', с', b', е', f ' и соединяем их радиусами с центром О1 .
3)Проводим через точки d', c', b', e', f' перпендикулярно к радиусам лучи. Далее на этих лучах откладываем отрезки: на луче d'-отрезок Aс, получим точку 1; на луче с'-отрезок Ad, получим точку 2 и т. д.
4)Соединим найденные таким образом точки 1, 2, 3, 4, 5, получим эвольвенту.
5)Аналогичным построением получим профиль зубца и для второго колеса.
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
16 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|

6) Чтобы вычертить полный профиль зубца, откладываем по дугам начальных окружностей от точки К вправо и влево размер толщины зуба St = KK'. Делим St пополам и через середины зубцов, отмеченные
точками N и H, проводим прямые O1 N и 02 H. Строим эвольвенты
симметричные ранее построенным эвольвентам относительно прямых
O1 N и 02 H.
7) Место примыкания ножки зубца к окружности впадин скругляется радиусом R = 0,4 m.
Списоклитературы
1.Артоболевский И.И. Теория механизмов и машин. -М.:Наука, 2009.
2.Кожевников С.Н. Теория механизмов и машин. -М.,
«Машиностроение», 2006.
3.Коренянко А.С. Курсовое проектирование по теории механизмов и машин. Издательство «Вища школа», 2007.
4.Решетов Д.Н. Детали машин. -М., «Машиностроение», 2008.
5.Анурьев В.И. Справочник конструктора-машиностроителя, том 2.
-М., «Машиностроение», 2001.
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
|
|
|
|
||
|
|
|
|
|
17 |
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
1 |
5 |
|
|
|
|
|
|
В |
В |
|
|
|
механизма |
|
|
2 |
4 |
|
|
|
|
|
В |
|
||
|
1. |
|
|
В |
3 |
|
|
|
|
|
В |
|
|||
|
Приложение |
Кинематическая схема |
(М 1:3) |
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
|
w |
ÅА |
1 |
|
|
|
|
|
|
=60 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
j |
5 |
|
|
|
|
|
А |
|
А |
|
|
|
|
|
|
О |
|
|
|
|
|
|
2 |
|
4 |
|
|
|
|
|
А |
|
А |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
ТММ-05.00.00 |
Лист |
Изм. Лист |
№ докум. |
Подп. Дата |
|
18 |
|||
|
|
||||||
|
|
|
|||||
|
|
|
|
3 |
|
|
|
|
|
|
|
В |
|
|
|
|
Приложение 2. План скоростей. Второе положение ползуна (j =120 град) (М 1:3) |
|
2 |
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
V |
V |
|
|
|
|
|
|
P |
|
|
||
|
|
|
B |
|
A |
||
|
|
|
|
V |
|||
|
|
|
b V |
2 |
|
||
|
|
|
AB |
|
|||
|
1 |
V s |
a |
||||
|
w |
=120Å |
|||||
|
3 |
||||||
|
j |
||||||
|
|
|
|
О |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
ТММ-05.00.00 |
Лист |
||
Изм. Лист |
№ докум. |
Подп. Дата |
|
19 |
|||
|
|
|
|
||||
|
|
|
|
|
|||

|
|
|
B |
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
В |
|
|
|
град) |
|
|
w |
|
|
|
|
|
2 |
|
|
|
Приложение 2. План скоростей. Четвертоеположение ползуна (j =240 (М 1:3) |
|
|
|
AB |
|
|
|
|
|
V |
a |
||
|
|
|
2 |
|||
|
|
b |
|
|
||
|
|
|
|
A |
||
|
|
B |
|
V |
||
|
|
V |
V |
|||
|
|
P s |
||||
|
|
Å |
|
|
|
|
|
|
=240 |
О |
A |
|
|
|
|
V |
|
|
||
|
|
5 |
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
А |
|
|
|
|
|
|
ТММ-05.00.00 |
Лист |
|
Изм. Лист |
№ докум. |
Подп. Дата |
|
20 |
||
|
|
|
||||
|
|
|
|
|||