

Московский Государственный Технический Университет имени Н.Э. Баумана
Идентификация параметров математической модели датчика угловой скорости Учебно – методическое пособие
Издательство МГТУ им. Н.Э. Баумана
Москва 2013 г.
Содержание
Перечень сокращений
Введение
Выбор схемы датчика угловой скорости платформы малогабаритной поворотной установки МПУ – 1
Программное обеспечение стенда
Воспроизведение сигнала
Генерирование тестового сигнала
Спектральный анализ
Цифровая фильтрация сигнала
Функциональная схема стенда
Декомпозиция блока А0
Диаграмма А4 обработки сигнала
Декомпозиция блока А43. Обработка и анализ сигнала
Декомпозиция блока А432. Выбор фильтра
Декомпозиция блока А4323. Расчёт фильтра
Декомпозиция блока А433. Спектральный анализ
Идентификация параметров математической модели датчика угловой скорости (ДУС)
Математическая модель ДУСа
Алгоритм определения параметров (Алгоритм Качмажа)
Идентификация параметров
Список использованной литературы
Перечень сокращений
ДУС – датчик угловой скорости
ЛА – летательный аппарат
МПУ – малогабаритная поворотная установка
АЦП – аналого-цифровой преобразователь
ДУСУ – датчик угловой скорости унифицированный
ПЭВМ – персональная электронная вычислительная машина (компьютер)
ПО – программное обеспечение
Введение
Для осуществления процесса идентификации параметров датчика угловой скорости ЛА необходимо получить экспериментальные данные: напряжение ДУС, пропорциональное измеряемой угловой скорости, значение истиной угловой скорости и другие параметры.
Для этого был создан лабораторный стенд [1], функциональными задачами которого были:
создать угловую скорость вращения вдоль чувствительной оси исследуемого датчика угловой скорости;
зарегистрировать информацию с ДУСа о величине угловой скорости вращения;
зафиксировать информацию о истиной величине угловой скорости поворота платформы при помощи внешней (по отношению к ДУСу) системы или прибора;
обеспечить хранение и визуализацию этих экспериментальных данных;
обработать собранные данные по выбранным алгоритмам с целью определения параметров математической модели ДУСа типа ДУСУ.
Выбор схемы датчика угловой скорости платформы малогабаритной поворотной установки мпу – 1
При разработке стенда для испытаний датчиков угловых скоростей ЛА были рассмотрены два варианта выбора датчика для определения угловой скорости вращения платформы МПУ: электромагнитная и оптическая системы.
В стенде применена оптическая система на базе щелевого фотопрерывателя Sharp GR1A71R, так как она более проста в реализации и исключает влияние электромагнитных полей.
Оптическая система предполагает наличие оптопары – светодиода и фотодиода. Для реализации данной системы потребуется сверление отверстий в отсчётном лимбе 14. Резистор R2 используется для ограничения тока через светодиод.
Электрическая принципиальная схема системы представлена на Рис.1.
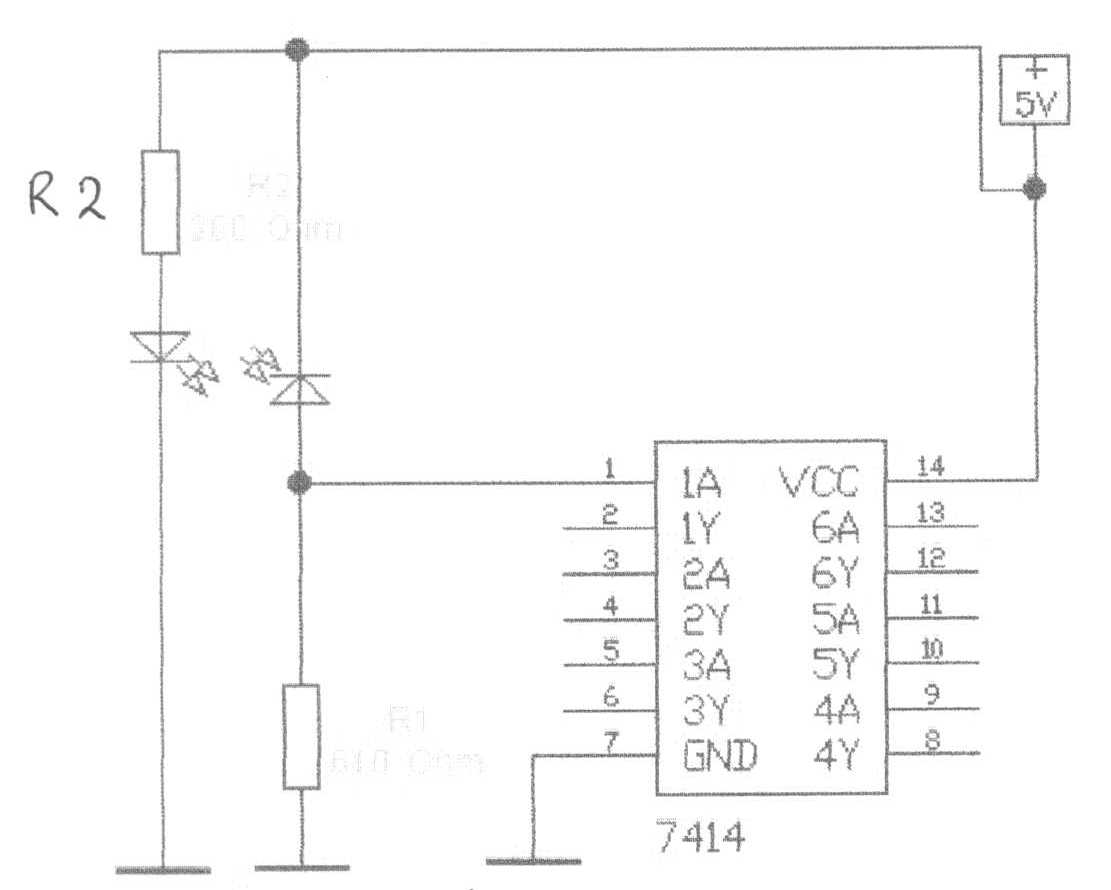
Рис.1. Схема электрическая принципиальная.
В качестве светодиода используется светодиод АЛ107Б, а в качестве фотодиода – ФД256, работающие в инфракрасном диапазоне излучения.