1.17 Кинематическая схема механизма
Расположение механизмов на грузовой тележке должно обеспечивать её минимальные габариты и массу, равномерную нагрузку на ходовые колёса при номинальном грузе на крюке.
На данном рисунке представлено компонование тележки мостового крана:

 ;
;

Координаты
центра тяжести равны:
 ;
;

Координаты
положения крюковой подвески равны:
 ;
;
 .
.
2. Расчет механизма передвижения крана
2.1 Выбор схемы механизма
Принимается механизм с приводными колесами, число которых и общее число колес зависят от условия, чтобы нагрузка колеса на рельс не превышала 200-250 кН.
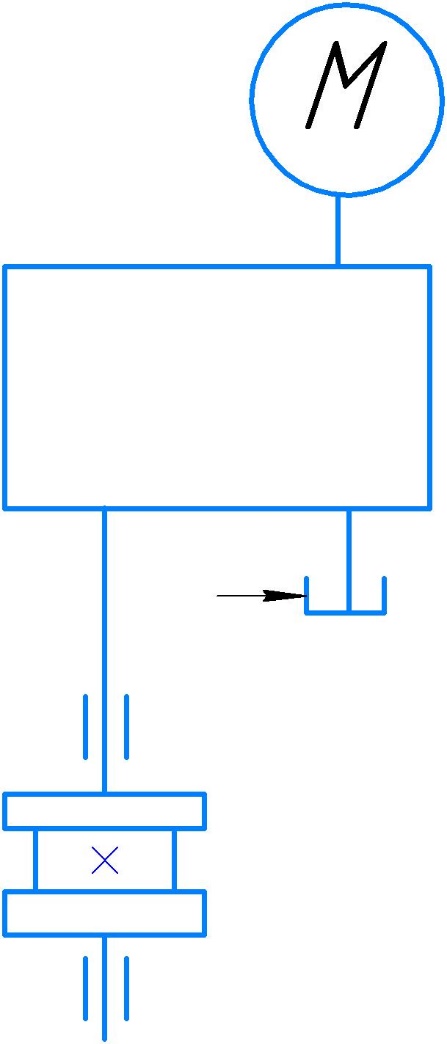
Рисунок 2.1 Схема привода передвижения моста крана.
2.2 Сопротивление передвижению крана на прямолинейном рельсовом пути

 сопротивление
трения скольжения в цапфах колес и
трения качения колес о рельс, кН:
сопротивление
трения скольжения в цапфах колес и
трения качения колес о рельс, кН:

где
 масса крана, из ГОСТ 25711-83
масса крана, из ГОСТ 25711-83

 коэф. сопротивления
движению:
коэф. сопротивления
движению:
где
 коэф. трения скольжения в цапфах колес,
коэф. трения скольжения в цапфах колес,
 ;
;
 коэф. трения качения
колеса,
коэф. трения качения
колеса,

 коэф., учитывающий
дополнительные сопротивления в ребордах
и ступицах колес при перекосах,
коэф., учитывающий
дополнительные сопротивления в ребордах
и ступицах колес при перекосах,

 диаметр колеса
(см. п. 3.7)
и его
цапфы, можно принять, что
диаметр колеса
(см. п. 3.7)
и его
цапфы, можно принять, что
 при
при

Следовательно:

Тогда:

 сопротивление,
вызванное уклоном пути, кН:
сопротивление,
вызванное уклоном пути, кН:

где
 сила тяжести крана и груза с захватным
устройством:
сила тяжести крана и груза с захватным
устройством:

 уклон пути, град.:
для мостовых кранов
уклон пути, град.:
для мостовых кранов

Тогда:

Тогда сопротивление передвижению:

2.3 Суммарная статическая мощность электродвигателей
Определяется по формуле, кВт:
где
 кпд
редуктора и открытой передачи
соответственно:
кпд
редуктора и открытой передачи
соответственно:
 ,
,

Тогда:

Для
передвижения мостовых кранов обычно
используют
 соответственно,
на каждый механизм приходится по 10 кВт.
соответственно,
на каждый механизм приходится по 10 кВт.
2.4 Выбор электродвигателя и соединительной муфты
Выбираем
электродвигатель MTF
132L6
с характеристиками:
Муфту выбираем по величине крутящего момента:

Момент,
передаваемой муфтой должен удовлетворять
условию
 ,
(с запасом не менее 1,3…1,5).
,
(с запасом не менее 1,3…1,5).
2.5 Проверка электродвигателя на кратковременную допустимую перегрузку
Условие отсутствия недопустимой перегрузки при пуске имеет вид:
где К
и
 фактическая и допустимая кратковременная
перегрузочная способность электродвигателя:
фактическая и допустимая кратковременная
перегрузочная способность электродвигателя:
 ;
;
 момент
на валу электродвигателя при пуске, Нм:
момент
на валу электродвигателя при пуске, Нм:

где
 статический момент на валу электродвигателя:
статический момент на валу электродвигателя:

 динамический
момент на валу электродвигателя:
динамический
момент на валу электродвигателя:
 время разгона,
время разгона,

 скорость
передвижения крана,
скорость
передвижения крана,

 номинальный момент:
номинальный момент:

Тогда:

Условие выполняется, следовательно двигатель подобран верно.
2.6. Определение числа и размера ходовых колес в одной балансирной тележке
При расчете необходимого числа ходовых колес исходят из условия:

Где
 максимальная нагрузка на опору, принимая
из ГОСТ 25711-83
максимальная нагрузка на опору, принимая
из ГОСТ 25711-83

 допускаемая
нагрузка на одно колесо,
допускаемая
нагрузка на одно колесо,

Тогда:
Исходя из принимаемых допускаемых значений нагрузки на колесо и условия ограничения контактных напряжений между колесом и рельсом, определяют размеры колеса и подкранового рельса.
При
 для
балансирной тележки крана принимаем
для
балансирной тележки крана принимаем
 а из ГОСТ 28648-90
а из ГОСТ 28648-90

Диаметр и ширина колеса стандартизованы и при выборе этих размеров проводят расчет по условию контактной прочности:
где допускаемые
контактные напряжения,
допускаемые
контактные напряжения,
 из
табл.3.1 [1, стр.50];
из
табл.3.1 [1, стр.50];
максимальная нагрузка на опору
 коэф., учитывающий
касательную нагрузку,
коэф., учитывающий
касательную нагрузку,

 коэф. неравномерности
распределения нагрузки по ширине рельса,
коэф. неравномерности
распределения нагрузки по ширине рельса,

 коэф. динамичности
пары колесо-рельс:
коэф. динамичности
пары колесо-рельс:

где
коэф. жесткости кранового пути,
 номинальная
скорость передвижения крана, м/с:
номинальная
скорость передвижения крана, м/с:

Тогда:

Из
табл.3.1 выбираем 40ХН с