

0118 / Kisilev_i_dr_MU_Kursovoy_proekt_GPM
.pdf5 РАСЧЕТ МЕХАНИЗМА ИЗМЕНЕНИЯ ВЫЛЕТА
5.1 Общие сведения
Наиболее распространенными механизмами изменения вылета являются: реечные, винтовые, секторно-кривошипные, кривошипношатунные, гидравлические и полиспастные механизмы.
Механизмы изменения вылета уравновешенных стреловых устройств выполняются с жесткой связью между стрелой и приводом механизма.
Вкранах с неуравновешенными стрелами нашли применение механизмы с гибким канатным соединительным звеном (полиспастом).
Впортальных кранах наибольшее распространение получили реечные (с одной или двумя рейками) и винтовые механизмы изменения вылета.
Реечные и винтовые механизмы просты в изготовлении и имеют наилучшие массовые характеристики. Удельная масса этих механизмов составляет соответственно:
mуд = (270…350) кг/кВт, mуд = (100…170) кг/кВт
Типы кранов, на которых установлены реечные и винтовые механизмы, приведены в таблице 5.1.
Таблица 5.1 – Типы кранов с реечным и винтовым механизмами изменения вылета
Тип стрелового |
Уравновешенные шарнирно-сочлененные стреловые |
||
устройства |
|
устройства |
|
Тип механизма |
Реечный |
|
Винтовой |
|
|
|
|
|
КПП 10-30-10,5 |
|
«Ансальдо 5-25-10,5» |
Наименование |
КПП 16-30-10,5 |
|
«Аплеваж 10-32-10,5» |
крана, на который |
«Ганц 5-30-10,5» |
|
плавучий кран |
установлен |
|
||
«Ганц 16-30-10,5» |
|
«Блейхерт 5-25» |
|
механизм |
|
||
|
|
|
|
|
«Ганц 16/27,5-33/16-10,5» |
|
|
|
«Альбрехт 10/20/32/16-10,5» |
|
|
71
Секторно-кривошипные и кривошипно-шатунные механизмы представляются наиболее громоздкими и металлоемкими. Их удельная масса оценивается величинами:
mсуд к = (300…350) кг/кВт, |
mудк ш = (400…500) кг/кВт |
Секторно-кривошипный механизм сложен в изготовлении, требует тщательного ухода и наблюдения во время эксплуатации, однако, для удобства укладки стрелы в «походное» положение используется на плавучих кранах КПл 5-30.
Кривошипно-шатунный механизм безопасен в работе, т.к. не требует концевых выключателей, но не отличается высокой надежностью.
Типы кранов, на которых установлены эти механизмы, представлены в таблице 5.2.
Таблица 5.2 – Типы кранов с секторно-кривошипным и кривошипношатунным механизмами
Тип стрелового |
Уравновешенные шарнирно-сочлененные |
|
устройства |
стреловые устройства |
|
Тип механизма |
Секторно-кривошипные |
Кривошипно- |
|
механизм |
шатунные механизмы |
Наименование |
КПК 2-17-10.5 |
КПП 5-30-10,5 |
крана, на котором |
«Ганц 5-25-10,5» |
КПП 10-30-10,5 |
установлен |
«Ганц 5-22,4-10,5» |
«Каяр 5-30-10,5» |
механизм |
плавкраны |
плавкраны завода |
|
КПл 3-17 |
"Коммунар" |
|
КПл 5-30 |
КПл 5-25 |
Гидравлические механизмы изменения вылета устанавливаются на плавучих кранах, например, на кранах КПл 15-30, КПл 16-30
Эти механизмы имеют небольшую массу, обеспечивают плавный разгон и торможение стрелового устройства.
Полиспастный механизм изменения вылета стрелы устанавливается на автомобильных, пневмоколесных, гусеничных, железнодорожных, мачтовых кранах.
На этих типах кранов установлены прямые неуравновешенные стрелы с негоризонтальным перемещением груза при изменении вылета.
Весьма важным является обеспечение установившейся скорости перемещения груза при изменении вылета. Обеспечив равномерное движение груза, можно, существенно уменьшить амплитуду колебаний груза. Однако в силу конструктивных особенностей механизмов изменения вылета получить постоянную по величине скорость перемещения груза практически невозможно.
72
В зависимости от типа стрелового устройства и используемого механизма изменения вылета можно обеспечить различную степень неравномерности перемещения груза по горизонтальной или близкой к ней траектории.
Наилучшие показатели оценки равномерности перемещения груза имеют реечные, винтовые, гидравлические механизмы. Несколько хуже эти показатели у секторных и кривошипных механизмов. Изложенные выше соображения целесообразно иметь в виду при выборе типа механизма изменения вылета.
5.2 Расчет реечных и винтовых механизмов изменения вылета
Схема стрелового устройства с реечным механизмом вылета показана на рисунке 5.1, а схема реечного и винтового механизмов – на рисунках 5.2
и 5.4.
Компоновочные схемы реечных и винтовых механизмов изменения вылета стрелы представлены на рис 5.1 и 5.4. Кинематические схемы механизмов показаны на рис. 5.2 и 5.4. На схемах приняты следующие обозначения
l1, l2 - расстояния от ведущей шестерни привода до точки (Е) крепления рейки к стреле соответственно при минимальном (Lmin) и максимальном(Lmax) вылетах, м;
Dш - диаметр ведущей шестерни механизма, м (Dш = 0,16 0,24 м); Fр - усилие в рейке, кН;
rр - плечо силы, м;
р - скорость движения рейки при изменении вылета, м/с; Fв - усилие в винте, кН;
rв- плечо силы, действующей в винте, м;
в - скорость поступательного движения винта, м/с; Количество электродвигателей зависит от выбранной схемы привода
(один или два). В последнем случае один из них может использоваться в качестве тормозного электродвигателя, т.е. для регулирования скорости изменения вылета и для предварительного подтормаживания механизма при остановке.
Предварительное подтормаживание может осуществляется и при наличии одного двигателя путем перевода его в режим электрического торможения, что достигается корректировкой характеристики электродвигателя. Последующее торможение системы осуществляется с помощью тормозов.
В механизмах изменения вылета применяются двухколодочные тормозные устройства нормально-замкнутого типа с электрогидравлическим толкателем.
73

Рисунок 5.1 – Схема уравновешенного стрелового устройства с реечнм механизмом изменения вылета
1 – электродвигатель; 2 – упругая муфта с тормозным шкивом; 3 – редуктор; 4 – муфта зубчатая; 5 – демпфер; 6 – рейка зубчатая; 7 – сферический двухрядный роликовый подшипник; 8 – шестерня; 9 – вал; 10 – тормоз типа ТКГ
Рисунок 5.2 – Схема реечного механизма вылета
74
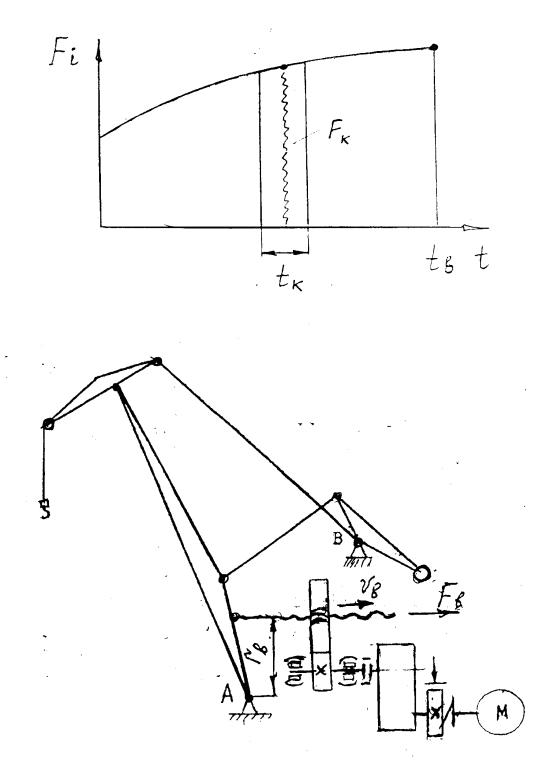
Рисунок 5.3 – Кривые нагрузки на рейку механизма изменения вылета
Рисунок 5.4 – Схема уравновешенного стрелового устройства с винтовым механизмом вылета
75
При использовании двух и более тормозных устройств часть из них также выполняет функции первой ступени торможения, а другие применяются для полного торможения. Удержание стрелы осуществляется всеми тормозными устройствами.
Редукторы реечных и винтовых механизмов, показанных на рисунках 5.2 и 5.4, имеют передаточное число (Uр = 40.. .70, открытые передачи Uоп = 4.. .9. Общее передаточное число механизмов Uобщ=300...650.
В качестве исходных данных (основного вида нагрузок) при расчетах всех перечисленных выше типов механизмов принимают. величину суммарного момента МА относительно опорного шарнира стрелы (точка А).
5.2.1 Определение суммарного момента относительно опорного шарнира стрелы (т. А)
Суммарный момент MAi , кН.м /7, 8, 13/
MAi = Мнс Мнг Мα Мв + Мц
где Мнc - неуравновешенный момент стреловой системы, кН.м; Мнг - неуравновешенный грузовой момент, кН.м;
Мα - момент, возникающий при отклонении груза от вертикали на угол α, кН.м;
Мв - момент от действия ветра на стреловое устройство, кН.м; .
Мц - момент от действия центробежных сил инерции масс стрелы и хобота, возникающий при вращении крана, кН.м.
Момент от сил инерции стрелы при изменении вылета не учитывается ввиду его малости. Для механизмов изменения вылета стрелы плавучих кранов учитывается дополнительный момент Мкр, вызванный креном и дифферентом понтона крана, т. е.
М А = МА + Мкр
Характер изменения суммарного момента МА и его отдельных слагаемых для шарнирно-сочлененного стрелового устройства с прямым хоботом в зависимости от вылета (L) показан на рисунке 5.5
Суммарный момент и его отдельные слагаемые рассчитываются для фиксированных значений положения стрелового устройства (i = 1, 2, 3, 4, 5), характеризующих определенное положение устройства. Для определенности будем полагать, что i = 1 и, i = 5 соответствует Lmin и Lmax , i = 3 - среднему вылету Lcр; i = 2, i = 4 - промежуточным положениям стрелы (рисунок 5.5).
76

Рисунок 5.5 – Характер (приближенный) изменения моментов, действующих на стреловое устройство (определяется для каждого конкретного типа крана)
77

5.2.2 Определение мощности и выбор двигателя для реечного и винтового механизмов
Мощность двигателя N, кВт /7/
NFcк p
,
Fcк - средняя квадратичная нагрузка на рейку (винт), кН;
p - скорость рейки, м/с;
- кпд привода. Нагрузка
|
|
|
Fск |
(Fк2tк ) |
|
, |
||
|
tв |
|
где Fк – средняя нагрузка на рейку за время tк , кН (рисунок 5.3) tв – время изменения вылета, с.
Средняя скорость рейки p ( винта
|
|
|
lmax |
lmin |
|
|
|
p |
|
|
t |
, |
|
|
|
|
|
в |
||
где lmax и lmin – расстояния от шестерни до точки присоединения рейки к стреле на наибольшем и наименьшем вылетах, м ( lmin=l1 ; lmax=l5)
Время изменения вылета tв , с, определяется по формуле
tв |
|
Lmax Lmin |
|
|
в |
, |
|||
|
|
|
|
|
где в - скорость |
изменения |
вылета, м/с, являющаяся |
||
характеристикой крана; |
|
|
|
|
Общий кпд механизма, |
η=η1η2η3 |
|
|
|
где η1 - кпд реечного зацепления; η2 - кпд редуктора;
η3 - кпд стреловой системы (η3 = 0,8...0,9)
78

При несовпадении значений относительной продолжительности включения ПВ%, заданных в техническом задании (ТЗ) на проектирование (или определяемым по циклограмме), со значением ПВ%, указанном в каталоге на двигатели, расчетное задание уточняют по формуле:
рас |
N |
(ПВ)ТЗ |
|
(ПВ)кат |
|||
|
|
По полученному Nрас по каталогу выбирают электродвигатель. Условие выбора электродвигателя:
Nкат ≥ Nрас
5.2.3 Проверка электродвигателя на кратковременную перегрузку
Условие проверки:
0,8Мmax ≥ MIImax ,
где Mmax – максимальный крутящий момент выбранного электродвигателя (определяется по каталогу), Н.м;
MIImax – максимальный крутящий момент от действующих нагрузок, приведенный к валу двигателя, определенный для второго
расчетного случая (ветровая нагрузка рII = 250 Па), угол |
отклонения |
||
грузовых канатов αII= 2 αI (для монтажного крана αII=6о , для грейферного |
|||
αII=10о) |
|
|
|
MIImax = max {MIIi}, |
|
|
|
MIIi = ( Мнс Мнг МαII Мв + Мц)i |
rш |
||
|
|
, |
|
rU |
|
||
|
i |
об |
|
где Uоб = nд/ nш - общее передаточное число реечного механизма;
Uоб = nд/ nв - общее передаточное число винтового механизма; nд - частота вращения вала электродвигателя, об/мин.;
79

nш, nв - частота вращения шестерни и винта, об/мин:
nш |
60 p |
|
nв |
|
60 |
в |
|
|
|
|
|||||
|
|
|
|
|
|
||
|
Dш |
; |
|
|
Sz , |
||
где S - шаг винтовой нарезки, м; Dш – диаметр шестерни, м;
z - число заходов нарезки;
p, в - скорость перемещения рейки и винта, м/с.
5.2.4 Выбор редуктора
Условия выбора редуктора реечного механизма изменения вылета:
-Upед = Uоб
- |
[Nред] ≥ Nрас , |
|
|
N |
(ПВ)ТЗ |
|
рас |
(ПВ) ред(кат) |
, |
||||
|
|
|
||||
|
|
|
|
|
|
|
где |
[Nред] - мощность, которую |
можно подвести к |
|
|||
быстроходному валу редуктора при nБ=nд , nБ – частота вращения быстроходного вала редуктора, кВт.
5.2.5 Выбор тормоза
Тормоза стреловых устройств должны удовлетворять следующим требованиям:
1. Тормоз должен удерживать стреловое устройство в рабочем состоянии; для выполнения этого требования необходимо:
Mт ≥ 1,5 MIImax ,
где Мт - тормозной момент, который приводится в каталогах на тормозные устройства.
80