

0118 / Kisilev_i_dr_MU_Kursovoy_proekt_GPM
.pdfдля подшипников качения 0,01 0,02; для подшипников скольжения
0,1; /8/
К- коэффициент трения качения колеса: K=0,3...0,6 мм;
|
DK |
и d -диаметр колеса и его цапфы, мм, (см. п. 3.7). |
|
|
||||||||||
Можно |
принимать в |
ходовых тележках |
кранов |
- |
DK 500 1000мм , |
|||||||||
|
d |
|
1 |
... |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
DK |
6 |
8 |
|
|
|
|
|
|
|
|
|
||
в грузовых тележках - |
DK 200 400мм , |
|
d |
|
1 |
... |
1 |
|
||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
DK |
4 |
|
6 |
|
|
С – коэффициент, учитывающий дополнительные сопротивления в ребордах и ступицах колес при перекосах; если колеса на подшипниках качения - С= 2,3...2,5; на подшипниках скольжения – С = 1,3...1,5/8/.
3.2.2 Ветровая нагрузка на кран FвI , кН
FвI pI AН ,
где pI - распределенная ветровая нагрузка на единицу расчетной наветренной площади, pI = 150 Па;
AН - расчетная наветренная площадь (нетто) крана,
перпендикулярная действию ветра, м2 :
AH AH1 AH 2 AH 3 AH 4 AH 5 AH 6 ,
где AH1, AH 2 , AH 3 , AH 4 , AH 5 , AH 6 - соответственно наветренные
площади (нетто) груза, хобота, стрелы, машинного отделения, противовеса, портала (рисунок 3.3.).
Наветренная площадь груза AH 1 принимается по фактическим данным, а при их отсутствии может быть принята согласно действующего ГОСТ 145-77, равной:
Q, т |
1 |
|
2 |
3.2 |
5 |
|
10 |
20 |
|
32 |
63 |
|
100 |
AH1 , м 2 |
1,8 |
|
4 |
5,6 |
6,1 |
|
10 |
16 |
|
20 |
28 |
|
36 |
Наветренная площадь (нетто) конструкции AH , м2 |
|
|
|
||||||||||
|
|
|
|
|
AH |
Kc Aбр , |
|
|
|
|
|
||
где |
K c |
- коэффициент |
сплошности; |
для |
решетчатых ферм |
K c = |
|||||||
0,2...0,6; для сплошных конструкций (машинное отделение, стрела
41
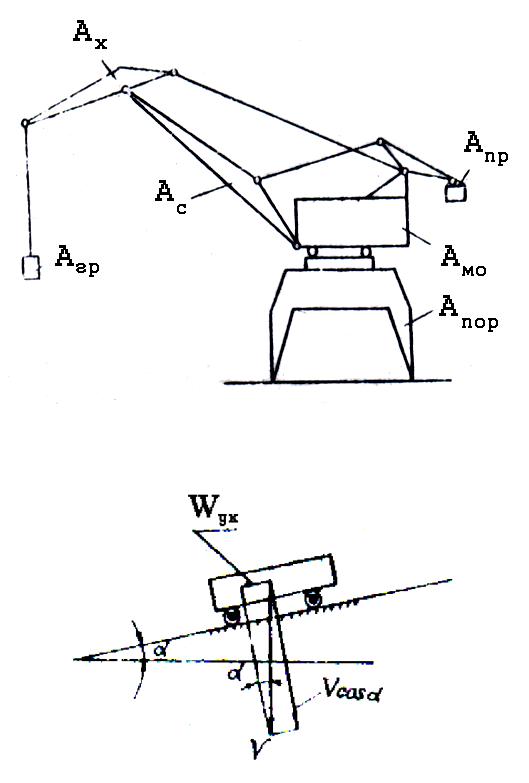
Рисунок 3.3 – Схема к расчету наветренных площадей крана
Рисунок 3.4 – Схема к определению сопротивления, вызванного уклоном пути
42
коробчатой конструкции, противовес и др.) K c =1,0 ; для механизмов
K c =0,8...1,0, /8/.
Aбр -площадь брутто или контурная площадь, очерченная
внешнем габаритом, м2.
Хобот и стрела портального крана выполняются в виде решетчатой или коробчатой конструкции, поэтому
AH 2 Kc Aх ; AH 3 Kc Ac ,
где Aх, Aс - контурные площади хобота и стрелы, определяемые в
масштабе по крану-аналогу /31, 32/, м2 .
Для остальных частей крана коэффициент сплошности Kc 1 , поэтому площади нетто численно равны площадям контурным:
AН 4 Aмо ;
AH 5 Aпр;
AH 6 Aпор,
где Aмо , Aпр , Aпор - контурные площади машинного отделения, противовеса, портала, м2.
3.2.3 Сопротивление Wук ,кН, вызванное уклоном пути
(плюс - движение на подъем, минус - движение под уклон) (рисунок 3.4.)
Wук V sin ,
где V - сила тяжести крана и груза с захватным устройством, кН,
V=9,81.( mкр + Q);
- уклон пути, град; для портальных кранов и козловых кранов sin 0,002...0,003 /7/; для мостовых кранов sin - 0,001; для тележек мостовых кранов sin – 0,002;
43

3.3 Суммарная статическая мощность электродвигателей.
Суммарная статическая мощность электродвигателей Nст , кВт, определяется по формуле /7, 8/
Nст Wп пр ,
где Wп - сопротивление передвижению крана, кН;
пр - скорость передвижения, м/с;
- кпд механизма
|
р оп , |
где р - кпд редуктора, |
для коническо-цилиндрического редуктора |
типа КЦ-1 р 0,94; |
для червячного - 0,7-0,9; цилиндрического |
типа Ц2 - 0,96; вертикального типа ВК- 0,91 |
|
оп - кпд открытых зубчатых передач, оп 0,85 0,95. |
|
3.4 Статическая мощность одного электродвигателя.
Статическая мощность одного электродвигателя Nст , кВт, вычисляется по формуле
Nст Nст ,
Zэ
где Zэ - число электродвигателей: для механизмов передвижения портальных кранов грузоподъемностью нетто Q до 5 т Zэ =2, при Q свыше 5 т Zэ =4; для механизмов передвижения мостовых и козловых кранов - Zэ=2, для механизма передвижения грузовых тележек мостовых кранов с центральным приводом - Zэ=1, козловых кранов с центральным приводом - Zэ=1, с индивидуальным приводом - Zэ=2.
3.5Выбор электродвигателя и соединительной муфты
3.5.1Выбор электродвигателя
Для механизмов передвижения портальных и козловых кранов из каталога выбирается электродвигатель (с фазным ротором ) типа MTF или MTH при ПВ =15...25% из условия:
Nном Ncт ,
44

где N ном - номинальная мощность электродвигателя ( каталожное
значение ),кВт.
Выписываются основные технические данные :
-тип электродвигателя;
-номинальная мощность Nном ,кВт;
-частота вращения ротора nд ,об/мин;
-относительная продолжительность включения ПВ,%;
-максимальный крутящий момент на валу двигателя Mдmax , Н м ;
-маховой момент ротора GDp2 , H м2 ;
-масса электродвигателя mэ , кг.
Приводится схема электродвигателя с указанием основных размеров. Для механизмов передвижения мостовых кранов значение
относительной продолжительности включения ПВ=25...40%.
Для механизма передвижения грузовых тележек мостовых кранов ПВ=15...25%, грузовых тележек козловых кранов ПВ=25...40%.
3.5.2 Выбор соединительной муфты
Для соединения вала электродвигателя с быстроходным валом редуктора рекомендуется муфта упругая втулочно-пальцевая с тормозным шкивом типа МУВП /32/ (для механизма передвижения портальных кранов).
Для обеспечения торможения при возможном срезе пальцев и увеличении долговечности упругих элементов (резиновых амортизаторов) тормозной шкив необходимо закреплять на валу редуктора. Муфта выбирается по величине крутящего момента, Н.м
Mст 9554 Ncт nд
Момент, передаваемый муфтой, M муф Mст (с запасом не менее
1,3...1,5)
Указываются основные технические данные муфты - параметры тормозного шкива (диаметр Dm и ширина Bm ), число пальцев, допустимый крутящий момент M муф , маховой момент муфты GDм2 , масса mм .
Для механизмов передвижения мостовых кранов и их грузовых тележек рекомендуется зубчатая муфта с тормознам шкивом /17, 32/
45

3.6 Проверка электродвигателя на кратковременную допустимую перегрузку
Условие отсутствия недопустимой перегрузки при пуске /8/ имеет вид:
K |
M пуск |
K |
|
|
|
, |
|||
|
M |
|
|
|
|
ном |
|
||
где K и [K] - фактическая и допустимая кратковременная перегрузочная способность электродвигателя (кратность максимального момента);
M пуск - момент на валу электродвигателя при пуске, Н.м;
M ном - номинальный момент на валу электродвигателя, Н.м.
Mпуск Mст Mдин,
где M ст |
- статический момент на валу электродвигателя, Н.м; |
||||||||||||
M дин - динамический момент на валу электродвигателя, Н.м; |
|||||||||||||
Статический момент, Н.м |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
M |
|
9554 |
Nст |
, |
|
|
||
|
|
|
|
cт |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
nдв |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
где nдв |
- частота вращения вала электродвигателя, oб/мин. |
||||||||||||
Динамический момент (при пуске) /8/ |
|
|
|||||||||||
M |
|
|
1 |
[9565 |
(mкр |
Q) пр2 |
|
1,2nд |
(GD2 |
GD2 )], |
|||
дин |
|
|
|
|
|||||||||
|
|
t р |
|
|
Z |
эnд |
375 |
p |
м |
||||
|
|
|
|
|
|
|
|||||||
где mкр - масса крана, т;
Q – грузоподъемность, т;
nд - частота вращения вала электродвигателя, об/мин.;
пр - скорость передвижения, м/с; Zэ – количество электродвигателей; t р - время разгона, t р 3...5с.
Номинальный момент, Н·м
M ном 9554 Nном
nд
Допустимая перегрузочная способность электродвигателя
46
[K ] |
M |
мах |
|
д |
|
M ном |
||
3.7 Определение числа и размера ходовых колес в одной балансирной тележке
Нагрузка на одну опору крана равномерно распределяется между колесами в балансирной тележке. В процессе работы крана нагрузки на опоры крана изменяются от минимального значения (иногда равного нулю) до максимального значения. Это связано с изменением вертикальных сил (масса поднимаемого груза, смещением нагрузки при повороте крана или при передвижении грузовой тележки (у мостовых и козловых кранов)) и горизонтальных нагрузок (силы ветра, центробежной силы, возникающей при вращении поворотной части крана, и отклонении грузовых канатов) .
При расчете необходимого числа ходовых колес в балансирной тележке Zk исходят из максимального значения нагрузки на опору крана и допускаемой нагрузки на одно колесо, из условия контактной прочности пары «колесо-рельс»:
|
|
Zk |
|
Pmax |
|
||
|
|
|
|
||||
|
|
|
|
[ pk ] |
|||
Максимальная |
нагрузка на |
опору |
Pmax , кН, может определяться |
||||
приближенно по формуле |
|
|
|
|
|
|
|
|
Pmax |
9,81(mкр |
Q)Kнр |
||||
|
|
|
|
|
|
||
|
|
|
|
, |
|||
|
|
|
|
Zоп |
|||
где Zоп - число опор, единиц . (обычно Zоп =4 ,иногда Zоп = 3) |
|||||||
Kнр 1,4...1,6 |
- коэффициент |
учитывающий неравномерность |
|||||
распределения нагрузки на опоры крана и влияние ветровой нагрузки.
Допускаемая нагрузка на одно колесо портовых кранов принимается обычно в пределах [Рк]=200...250 k.H. Для тяжелых перегружателей иногда принимают [Рк] = 320 к.Н
Исходя из принимаемых допускаемых значений нагрузки на колесо и условия ограничения контактных напряжений между колесом и рельсом, определяют размеры колеса (диаметр обода DK и ширину bK ) и
подкранового рельса (рисунок 3.5).
Диаметр колеса DK и его ширина bK стандартизованы и поэтому при выборе этих размеров обычно проводят проверочный расчет по условию контактной прочности.
47
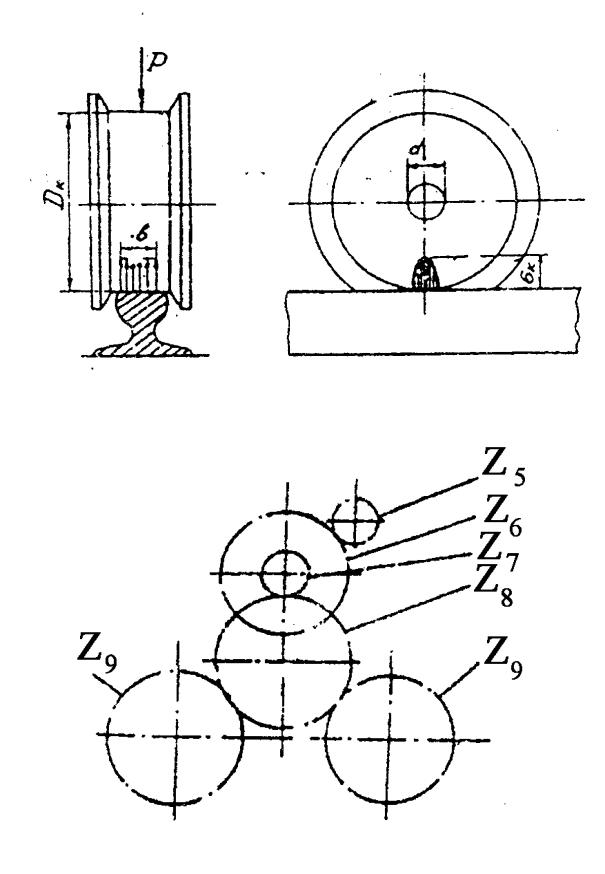
Рисунок 3.5 – Расчетная схема к выбору кранового рельса
Рисунок 3.6 – Двухступенчатая открытая зубчатая передача механизма передвижения
48

Контактное напряжение k , Мпа, между ободом колеса и плоской частью головки рельса, определяют по формуле
|
|
|
k 340K f |
|
Kд KH pk |
[ кон ], |
|
|
|
|
|
||
|
|
|
|
|
bk Dk |
|
где K f |
- коэффициент, учитывающий влияние касательной нагрузки |
|||||
( K f =1,1- для кранов на открытых площадках); |
||||||
K |
д |
- коэффициент динамичности пары колесо-рельс |
||||
|
|
|
|
|
|
|
|
|
|
Kд 1 a пр , |
|||
где пр - номинальная скорость передвижения, м/с; |
||||||
|
|
|
a – коэффициент жесткости кранового пути (а = 0,1...0,25, |
|||
|
|
|
0,1 - рельс на шпалах на балласте, |
|||
|
|
|
0,15 – на металлических балках, |
|||
|
|
|
0,2 - рельс на железобетонных балках, |
|||
|
|
|
0,25 - рельс на массивном фундаменте); |
|||
K H - коэффициент неравномерности распределения нагрузки по |
||||||
|
|
|
ширине рельса |
K H =1,5 (при опирании крана на |
||
|
|
|
балансирные тележки); |
|||
pk |
|
– расчетная нагрузка колеса на рельс, кН. |
||||
Допускаемые контактные напряжения [ кон ] при линейном контакте, принимаются по таблице 3.1 /31/
49

Таблица 3.1 – Допускаемые контактные напряжения [ кон ] при линейном контакте
Колесо, каток или круговой рельс |
кон , Мпа, при режиме работы |
|||||
каткового опорно-поворотного |
||||||
механизма передвижения |
||||||
устройства |
|
|||||
|
|
|
|
|
||
Марка материала |
НВ |
1М-3М |
4М |
5М |
6М |
|
(Л) |
(С) |
(Т) |
(ВТ) |
|||
|
|
|||||
Сталь 45 и 55 по ГОСТ 1050- |
200 |
500 |
450 |
----- |
----- |
|
74 |
||||||
|
|
|
|
|
||
Сталь 75 по ГОСТ 1050-74 |
|
|
|
|
|
|
65Г по ГОСТ 1050-74 |
300 |
850 |
800 |
750 |
700 |
|
40ХН по ГОСТ 4543-71 |
|
|||||
|
|
|
|
|
||
55ЛН по ГОСТ 977-75 |
200 |
450 |
400 |
350 |
300 |
|
55ЛН по ГОСТ 977-75 |
300 |
650 |
600 |
550 |
500 |
|
СЧ 35 по ГОСТ 1412-85 |
200 |
350 |
300 |
------ |
------ |
|
Примечания:
1.При точечном контакте допускаемые напряжения можно принимать в
2...2,5 раза больше.
2.Для конических ходовых колес необходима твердость 300НВ.
3.Для круговых рельсов шариковых роликовых поворотных опор применяют сталь марки 40ХН по ГОСТ 4543-71 и сталь 55 по ГОСТ1050-74.
4.Чугунные колеса и катки по правилам Госгортехнадзора разрешается использовать только для кранов с ручным приводом.
5.Проверке на контактные напряжения подлежат: в механизмах передвижения – только колеса; в опорно-поворотных устройствах - катки и круговые рельсы (вследствие большого числа нагружений). Стандартные шарики для шарикоподшипников на контактные напряжения можно не проверять.
6.Приведение режимов Л,С,Т и ВТ по правилам Госгортехнадзора к группам режима работы механизмов по ГОСТ 25835-83 см. /30 т.1,
табл. 1.2.5/.
3.8 Общее передаточное число механизма
U об nд
nк ,
где nд , nк -частота вращения вала электродвигателя и колеса, об/мин:
50