

Радиоавтоматика.-7
.pdf131
Прежде чем рассматривать методы вычисления суммарной средней квад-
ратической ошибки, установим, через какие передаточные функции в выражение для суммарной ошибки входят сигнал и помеха, полагая, что на вход системы
подаётся воздействие вида
f (t) x(t) n(t),
где x(t) – случайный сигнал; n(t) – случайная помеха.
Суммарная ошибка системы (рис. 7.7):
e (t) x(t) y(t),
где y(t) – выходной сигнал системы. |
|
|
|
|
|
n(t) |
|
|
|
x(t) |
f(t) |
|
y(t) |
|
|
|
|||
|
Wз(p) |
|
|
|
|
|
|
|
|
|
|
|
e(t) |
|
|
|
|
|
|
Рис. 7.7 – К определению суммарной ошибки системы РА |
|
|||
Преобразование Лапласа для суммарной ошибки имеет вид: |
|
|||
E p X p WЗ p F p We p X p WЗ p n p , |
(7.14) |
|||
где WЗ p – передаточная функция замкнутой системы; We p – передаточная функция ошибки анализируемой системы; X p , n p – преобразования Лапласа для сигнала и помехи.
Из выражения (7.14) следует, что суммарная ошибка состоит из двух со-
ставляющих, одна из которых, определяющая точность воспроизведения сиг-
нала, зависит от передаточной функции ошибки, вторая, обусловленная дей-
ствием помехи, – от передаточной функции замкнутой системы.
При анализе средней квадратической ошибки ограничимся случаем, когда сигнал и помеха являются стационарными случайными функциями. При этом
132
математическое ожидание помехи будем полагать равным нулю, а случайный сигнал представим в виде:
ο
x(t) mx x(t),
ο
где mx – математическое ожидание сигнала; x(t) – случайная составляющая сиг-
нала.
Математическое ожидание суммарной ошибки рассчитывают по теореме о конечном значении функции:
me lim pWe p mx p . |
(7.15) |
p 0 |
|
Точность системы относительно случайных составляющих сигнала и по-
мехи оценивается дисперсией ошибки:
|
σ2 |
M e2 |
(t) |
R (τ) |
|
|
, |
(7.16) |
|
|
|
|
|||||||
где σ2 |
e |
|
|
e |
|
τ 0 |
|
|
|
|
|
|
|||||||
– дисперсия ошибка; σ |
e |
– средняя квадратическая ошибка системы; e(t) – |
|||||||
e |
|
|
|
|
|
|
|
|
|
ошибка системы; M – математическое ожидание от квадрата ошибки; Re (τ) – ав-
токорреляционная функция ошибки.
На основании эргодической теоремы автокорреляционную функцию ошибки находят как среднее по времени от произведения случайных составляю-
щих ошибки, разделённых промежутком времени :
|
|
|
|
|
ο |
ο |
|
1 |
T |
ο ο |
|
|
|
|
R (τ) e(t) e(t τ) lim |
|
e(t) e(t τ)dt, |
(7.17) |
|||||
|
|
|
|
||||||||
|
|
|
e |
|
|
|
T 2T |
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
T |
|
|
ο |
ο |
|
ο |
|
|
|
|
|
|
|
|
где e(t) x(t) y(t) – случайная составляющая суммарной ошибки. |
|
||||||||||
|
По теореме свёртки, согласно (7.14): |
|
|
|
|||||||
|
|
|
ο |
|
ο |
ο |
|
|
|
||
|
|
|
|
|
|
|
|||||
|
|
|
e t |
e λ x t λ З λ |
n t λ dλ; |
|
|||||
|
|
|
|
|
|
|
|
|
|
(7.18) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ο |
|
|
ο |
ο |
|
|
|
||
|
|
|
|
|
|
||||||
|
|
e t τ |
e |
η x t τ η З η n t τ η dη, |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где e (t) – импульсная переходная функция ошибки системы; З (t) – импульс-
ная переходная функция замкнутой системы.

133
Так как рассматривают стационарный режим работы системы, то интегри-
рование в выражениях (7.18) берут от минус бесконечности.
Подставив выражение (7.18) в (7.17), найдём автокорреляционную функ-
цию ошибки:
e |
|
|
|
|
|
|
e |
|
|
|
|
e |
|
x |
|
|
|
|
|
|
|
|
З |
|
|
|
З |
|
П |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
R |
τ |
|
|
|
|
|
|
|
|
λ |
|
|
|
η |
R |
|
τ λ η |
|
|
|
|
|
|
λ |
|
|
|
η |
R |
τ λ η |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.19) |
|||
|
|
|
|
|
|
|
Пx |
|
|
|
|
|
|
|
З |
|
|
|
|
e |
|
|
|
|
Пx |
|
|
|
|
|
||||||||||
|
|
|
e |
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
λ |
|
|
|
|
η |
|
R |
|
|
τ |
λ η |
|
|
|
λ |
|
|
|
|
η |
|
R |
|
|
τ λ η |
dλ dη, |
|
|
||||||||||
где Rx (τ) – автокорреляционная функция сигнала; |
RП (τ) |
– автокорреляционная |
||||||||||||||||||||||||||||||||||||||
функция помехи; RxП (τ) и RПx (τ) – взаимные корреляционные функции.
Подставив в (7.19) нуль, получим дисперсию ошибки системы.
e |
|
|
|
|
|
|
|
e |
|
|
|
e |
|
|
|
|
x |
|
|
|
|
|
|
|
З |
|
|
|
З |
|
|
|
П |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
σ2 |
|
|
|
|
|
|
|
|
|
λ |
|
|
|
|
η |
|
R |
|
λ η |
|
|
|
|
|
|
λ |
|
|
|
|
η |
|
R |
|
λ η |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
xП |
|
|
|
|
|
|
|
З |
|
|
|
|
e |
|
|
|
Пx |
|
|
|
|
|
|
|
|
|
||||||||
|
|
e |
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
λ |
|
|
|
|
η |
|
R |
|
|
|
λ |
|
η |
|
|
|
λ |
|
|
|
|
|
η |
|
R |
|
λ |
η |
dλ dη |
(7.20) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σex2 |
σe2п σex2 |
п σепх2 . |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Дисперсия ошибки может быть вычислена и через ее спектральную плот-
ность, которая равна преобразованию Фурье от автокорреляционной функции ошибки системы (7.20):
Se ω Re τ e jωτdτ.
Подставив в это выражение формулу (7.19), определим плотность ошибки системы:
Se ω We jω 2 Sx ω WЗ jω 2 SП ωWe jω WЗ jω SxП ω We jω WЗ jω SПx ω ,
спектральную
(7.21)
где Sx ω – спектральная плотность сигнала; SП ω – спектральная плотность
помехи; SxП ω |
и SПx ω – взаимные спектральные плотности. |
||
Так как |
|
|
|
|
|
1 |
|
|
Re τ |
Se ω e jωτdω, |
|
|
2π |
||
|
|
|
|

134
то в соответствии с выражением (7.16) дисперсия ошибки [2–4]:
|
|
1 |
|
|
|
|
|
|
2 Sx ω |
|
|
|
|
2 SП |
|
|
|
|||||||||
|
σe2 |
|
|
We jω |
|
|
WЗ jω |
|
ω |
|
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
2π |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
З |
|
|
|
|
Пx |
|
|
||||
З |
|
|
|
|
xП |
|
|
|
|
|
|
|
|
|
(7.22) |
|||||||||||
W |
jω W |
jω |
S |
|
|
ω |
|
W |
jω W |
jω |
S |
|
ω dω |
|||||||||||||
|
|
|
|
|
|
|
σex2 |
σe2п σex2 |
п σепх2 . |
|
|
|
|
|||||||||||||
Если сигнал и |
помеха |
|
не |
коррелированы, |
|
то |
RxП (τ) RПx (τ) 0 ; |
|||||||||||||||||||
SxП (ω) SПx (ω) 0 и выражения (7.18)–(7.22) упрощаются. Первое слагаемое в
(7.22) зависит как от АЧХ ошибки системы, так и от статистических характери-
стик сигнала, оно определяет среднюю квадратическую ошибку воспроизведе-
ния сигнала x(t). Второе слагаемое в (7.22) зависит от АЧХ замкнутой системы и характеристик помехи. Оно характеризует ошибку системы вследствие действия помехи n(t). Последние два слагаемых в (7.22) – составляющие ошибки из-за кор-
реляции сигнала с помехой и помехи с сигналом. |
|
|||||
Величину |
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
|
|
m2 |
σ2 |
(7.23) |
|
|
|
e |
e |
|
||
называют суммарной средней квадратической ошибкой системы РА.
Вычисление средней квадратической ошибки через ее автокорреляцион-
ную функцию (7.19) связано с некоторыми трудностями, одна из которых свя-
зана с нахождением импульсной переходной функции анализируемой системы РА, другая – с вычислением (7.20). Поэтому на практике среднюю квадратиче-
скую ошибку рассчитывают через спектральную плотность ошибки по формуле
(7.22).
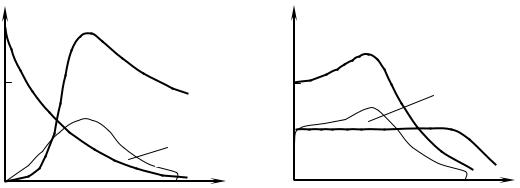
В инженерной практике среднеквадратическая ошибка также находится с помощью графоаналитического метода. Для этого строят графики, соответству-
ющие отдельным слагаемым выражения (7.21). Дисперсия ошибки для некорре-
|
|
2 |
|
|
Q |
, где Qx |
и QП – площади по гра- |
|
лированных сигнала и помехи |
σ |
|
Qx |
|
П |
|
||
|
|
|||||||
|
|
|
|
|
π |
|
|
|
фиками спектральных плотностей (рис. 7.8).
|
|
135 |
|
S |
We 2 |
S |
|
|
|
||
|
|
|
|
|
Sx |
|
2 |
|
|
|
Wз |
1 |
|
|
Qп |
|
|
|
|
|
|
|
Seп |
|
Sex |
|
|
|
Qx |
|
|
0 |
|
0 |
|
|
|
Рис. 7.8 – К определению средней квадратической ошибки системы РА
На практике часто встречаются случаи, когда помеху можно считать белым шумом, спектральная плотность которого в пределах полосы пропускания си-
стемы РА постоянна.
При этом дисперсия ошибки системы из-за действия помехи определяется по формуле:
2 |
|
SП 0 |
|
WЗ jω |
|
2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
σeП |
|
|
|
|
|
|
|
|
dω. |
|
|||||||
2π |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Величину |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||
fэф2 |
|
|
WЗ jω |
|
2dω, |
|
ωэф2 |
|
|
WЗ jω |
|
2dω |
(7.24) |
||||||
|
|
|
|
|
|||||||||||||||
2π |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
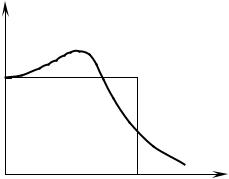
называют эффективной полосой пропускания системы РА, и она является осно-
ванием прямоугольника, площадь которого равна площади, ограниченной гра-
фиком квадрата АЧХ (рис. 7.9). Дисперсия ошибки системы РА из-за действия помехи вычисляется по выражению:
2 |
|
Sп ω ωэф |
|
|
|
σеп |
|
. |
(7.25) |
||
π |
|||||
|
|
|
|
Выражения для расчёта эффективной полосы пропускания систем РА,
наиболее часто встречающихся в радиотехнических устройствах, приведены в таблице 7.2 [2].
136
Wз Wз 2
1
0 |
эф=2 fэф |
|
Рис. 7.9 – К определению эффективной полосы пропускания системы РА
Таблица 7.2 – Формулы расчёта эффективной полосы пропускания систем РА
|
|
|
Wp(p) |
|
|
|
|
|
|
|
fэф |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
K |
||||||
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
K |
|
|
|
|
|
|
|
|
K 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 pT |
|
|
|
|
|
|
2T 1 K |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
K |
|
|
|
|
|
|
|
|
K |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
p 1 pT1 1 pT3 |
|
2 T1 T3 KT1T3 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
K 1 pT2 |
|
|
|
K T1 KT22 |
||||||||||||||
|
|
p 1 pT1 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
2T1 1 KT2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
K 1 pT |
|
|
|
|
1 KT 2 |
|||||||||||||
2 |
|
|
|
2 |
|
|
|
|
||||||||||||
|
|
|
p 2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
2T |
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При анализе точности работы систем РА в реальных условиях возникает трудность моделирования помех. Однако если использовать формирующий фильтр, то анализ систем РА относительно сигналов сводится к случаю действия на систему белых шумов.
Формирующий фильтр – устройство, позволяющее генерировать случай-
ный сигнал с заданной спектральной плотностью из сигнала белого шума. Ха-
рактеристики формирующего фильтра для стационарных случайных сигналов определяются в следующем порядке. Так как спектральная плотность сигнала
137
является чётной дробно-рациональной функцией частоты, то она может быть представлена в виде двух комплексно-сопряжённых сомножителей вида
Sx ω Nxψ jω ψ jω .
Передаточная функция формирующего фильтра имеет вид:
Wф ω ψ jω jω p .
Для расчёта коэффициентов передаточной функции формирующего филь-
тра выражение для спектральной плотности сигнала нужно записать в виде:
N |
|
|
c2m jω 2m ... c2 jω 2 |
c0 |
|
|
bm jω m ... b1 jω b0 |
|
N |
. |
(7.26) |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||
|
x |
|
d2n jω 2n ... d2 |
jω 2 |
d0 |
|
|
dn jω n ... d1 jω d0 |
|
x |
|
|
Вычислив квадрат модуля в левой части (7.26) и приравняв коэффициенты при одинаковых степенях частоты слева и справа, получим уравнения для опре-
деления коэффициентов передаточной функции формирующего фильтра ai и bi.
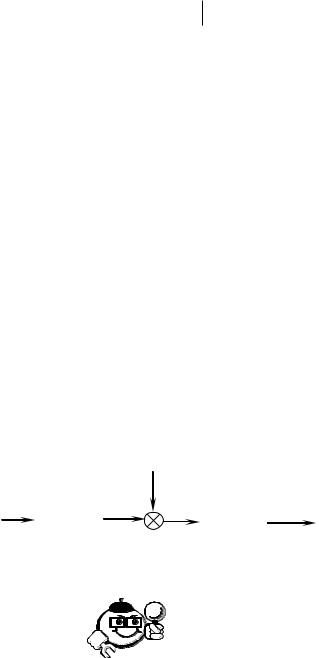
Формирующий фильтр и анализируемая система РА образует некоторую расширенную систему (рис. 7.10), на вход которой действует помеха, являюща-
яся белым шумом. Если помеха не является белым шумом, то в схему необхо-
димо включить формирующий фильтр, который из белого шума будет генериро-
вать случайную помеху с заданной спектральной плотностью.
|
|
|
n(t) |
|
|
|
U(t) |
|
x(t) |
f(t) |
|
y(t) |
|
Wф(p) |
Wз(p) |
|||||
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.10 – Схема включения формирующего фильтра
· · · · · · · · · · · · · · · · · · · · · · · · · |
Пример · · · · · · · · · · · · · · · · · · · · · · · · · |
Найти передаточную функцию формирующего фильтра для сигнала, воз-
никающего из-за колебаний летательного аппарата, спектральная плотность ко-
торого
Sк ω Nк |
1 T 2 ω2 |
|
|
. |
||
|
к0 |
|
|
|
||
|
ω2 T 4ω4 |
4ξ |
2T |
2ω2 |
1 |
|
|
к |
|
к |
|
|
|
138
Решение
В соответствии с выражением (7.26) спектральная плотность будет равна
|
1 T 2 |
ω2 |
|
|
|
|
|
b b jω |
|
|
2 |
||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Nк |
|
к0 |
|
|
Nк |
|
|
|
0 |
|
1 |
|
|
|
. |
ω2 T 4ω4 |
4ξ2T 2ω2 |
1 |
|
ω |
|
a2 jω |
2 |
a1 jω a0 |
|
|
|
||||
|
к |
|
к |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из последнего выражения найдём, что
|
b0 1; |
b1 Tк0 ; |
|
a1 1; |
a12 2Tк2 1 2ξ2 ; |
a2 Tк2. |
|
Таким образом, передаточная функция формирующего фильтра имеет вид:
Wфк p Nк |
|
1 Tк0 p |
|
, |
(7.27) |
||
p T 2 p2 |
2ξ T p 1 |
||||||
|
|
|
|||||
|
|
к |
к к |
|
|
|
|
где 2ξк 
 2 2ξ2 1 .
2 2ξ2 1 .
На вход формирующего фильтра с передаточной функцией (7.27) нужно подать белый шум с уровнем спектральной плотности Nк.
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
· · · · · · · · · · · · · · · · · · · · · · · · · |
Пример · · · · · · · · · · · · · · · · · · · · · · · · · |
Определить среднюю квадратическую ошибку системы автоматического сопровождения цели РЛС, передаточная функция которой в замкнутом состоя-
нии имеет вид:
WЗ p |
|
1 pT2 |
|
, |
|
1 |
pT1 1 pT3 |
|
|||
|
|
где T1 0.37 с ; T2 0.5 с ; T3 0.14 с .
На систему поступают:
1. Сигнал, обусловленный перемещением сопровождаемой цели относи-
тельно РЛС, установленной на летательном аппарате. Математическое ожидание и спектральная плотность случайной составляющей этого сигнала определяется выражениями:

|
|
|
139 |
|
|
|
|
|
|
|
mx αt, |
Sx ω |
|
|
Nк |
|
, |
|
|
ω2 |
1 T 2ω2 |
|
||||
|
|
|
|
|
||||
|
|
|
|
|
|
x |
|
|
где α 0.175 рад с–1 ; N |
x |
3.05 10–4 рад2 с ; |
T 20 с . |
|
||||
|
|
|
|
|
x |
|
|
|
2. Случайное воздействие, возникающее из-за колебаний летательного ап-
парата относительно центра масс. Спектральная плотность этого воздействия:
|
|
Sк ω Nк |
|
|
1 T 2 ω2 |
|
|
, |
||
|
|
|
|
|
к0 |
|
|
|||
|
|
|
|
|
ω2 T 4ω4 |
4ξ2T |
2ω2 1 |
|
||
|
|
|
|
|
|
к |
к |
|
|
|
где N |
к |
0.15 10–4 рад2 ; |
T 0.4 с |
; T |
2.5 с ; 4ξ2 |
|
1. |
|
||
|
|
к |
|
к0 |
|
|
|
|
|
|
3. Угловой шум, возникающий из-за того, что центр отражения радиолока-
ционного сигнала «блуждает» по сопровождаемой цели. Этот шум можно счи-
тать белым с уровнем спектральной плотности Syω 0.25L/R 2 , где L – геомет-
рический размер цели; R – дальность до сопровождаемой цели.
4. Помехи, обусловленные тепловым шумом приёмника РЛС и флуктуаци-
ями отражённого от цели сигнала. Эти воздействия при анализе можно считать белыми шумами и объединить в одно воздействие с уровнем спектральной плотности Sф ω Nф , где Nф 0.31 10–6 рад с .
Решение
Математическое ожидание (динамическая ошибка системы) в соответ-
ствии с выражением (7.15):
me lim pWe p |
α |
T1 T3 T2 α 0.17 10 2 |
рад, |
2 |
|||
p 0 |
p |
|
|
|
|
|
|
где We p 1 WЗ p – передаточная функция ошибки системы автоматического
сопровождения цели РЛС.
Дисперсия ошибки системы относительно случайной составляющей сиг-
нала вычисляется по формуле (7.22), в которой спектральная плотность под зна-
ком интеграла:
Sex ω Nx We jω Wфx jω 2 ,

|
|
|
|
140 |
|
где Wфx |
jω |
|
1 |
– частотная характеристика формирующего фильтра |
|
|
|
||||
jω 1 |
jωTx |
||||
|
|
|
|||
сигнала. |
|
|
|
|
Таким образом, дисперсия ошибки относительно сигнала будет опреде-
ляться как
|
|
1 |
|
|
|
|
|
2 Sx ω |
|
|
|
|
2 SП |
|
|
|
|
|||||||
|
σe2 |
|
|
We jω |
|
|
WЗ jω |
|
ω |
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
2π |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
e |
|
|
|
|
xП |
|
|
|
|
e |
|
|
З |
|
|
|
|
Пx |
|
|
||||
З |
|
|
|
|
|
|
|
|
|
|
|
|
(7.28) |
|||||||||||
W |
jω W |
jω |
S |
|
ω |
|
W |
jω W |
jω |
S |
|
ω |
dω |
|||||||||||
σex2 σe2п σex2 п σепх2 .
·· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
Таким образом, средняя квадратичная ошибка исследуемой системы рав-
няется сумме квадратов ошибок, обусловленных действиями на систему мешаю-
щих воздействий и помех.
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
Контрольные вопросы по главе 7
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·
1.Перечислите показатели качества систем РА.
2.Какова реакция системы РА на скачкообразный сигнал?
3.Какие методы используются для оценки показателей качества системы РА?
4.Перечислите основные показатели качества переходного процесса в си-
стемах РА.
5.Перечислите частотные показатели качества работы системы РА.
6.Для каких систем РА значение ошибки регулирования равно нулю, а
для каких – не равно нулю?
7.Дайте определение эффективной полосе пропускания системы РА.