

Практикум по Теоретической механике
..pdff 31 ln QP .
При заданных значениях f и Q получаем
P Qe3 f 10 * e3*3.14*0.25 105(H ).
Это означает, что система грузов будет в равновесии, если один из них весит 10 Н, а вес второго не превышает 105 Н.
Пример 1.19
Найти силу Р, с которой нужно толкать каток веса Q под углом α к горизонтали, если радиус катка R, коэффициент трения качения k. Определить значение α, при котором сила P минимальна.
P
|
R |
|
C |
B |
C |
|
Q |
Р е ш е н и е
Горизонтальная составляющая приложенной силы равна P·cos α. Эта сила должна преодолеть силу трения качения, причем нормальное давление катка на дорогу равно Q + P·sin α. Уравнение, связывающее эти силы, следует из закона для трения качения:
P cos Rk (Q P sin ).
Отсюда получим связь силы Р с величиной угла α:
P |
kQ |
|
|
. |
|
R cos k sin |
||

Сила определена, а для нахождения ее минимального значения надо исследовать полученную зависимость на экстремум. Это приводит к
соотношению для искомой величины угла α:
tg Rk .
Знак минус справа означает, что минимальное значение силы будет в случае, когда каток не толкают, а тянут под определяемым этим соотношением углом α к горизонту, в данном случае влево вверх.
1.3. Расчет плоских ферм (дополнительный к основной программе раздел)
Фермой называется геометрически неизменяемая конструкция,
состоящая из прямых стержней, закрепленных по концам шарнирно.
Из этого определения следует, что стержни в ферме могут быть только сжаты или растянуты и на изгиб не работают. Шарнирные скрепления стержней в ферме называются узлами.
При расчете ферм предполагают, что
1)все внешние силы приложены в узлах фермы;
2)весом стержней можно пренебречь;
3)трение в шарнирах отсутствует.
Обычно используется правило: при графическом изображении усилий в стержнях соответствующие стрелки всегда направлены от узла. Если в расчете получилось положительное значение усилия в стержне, то этот стержень растянут, иначе сжат.
Последовательность расчета ферм
1.Рисуется схема фермы, на которой показываются все внешние силы (в том числе неизвестные реакции связей – в виде сил, направленных, например, вдоль осей координат; иногда направления этих реакций определяются сразу) и усилия в стержнях с соблюдением сформулированного выше правила.
2.Проверяется условие геометрической жесткости и статической определенности фермы, связывающее число стержней m и число узлов n:
m = 2n – 3.
3.Определяются реакции связей, при этом ферма считается абсолютно жесткой.
4.Определяются усилия в стержнях фермы по одному из приведенных далее способов.

Способ вырезания узлов
Этот способ состоит в том, что последовательно «вырезают» узлы фермы и прикладывают к ним заданные силы, реакции связей и усилия в стержнях. Составляют два уравнения равновесия для каждого узла (суммируя все силы в проекциях на оси системы координат). При определении последовательности вырезания узлов нужно соблюдать правило: число неизвестных сил (обычно это усилия в стержнях) не должно превышать двух. Обычно для такого узла пишутся условия его равновесия – равенства нулю суммы проекций сил на оси системы координат.
Пример 1.20
В мостовой ферме, схема которой показана на рисунке, в узлах C и D приложена одинаковая вертикальная нагрузка по 100 Н. Наклонные стержни составляют угол 450 с горизонтом. Найти усилия в стержнях 1 - 6 от данной нагрузки.
Р е ш е н и е.
Находим реакции опор. В данном примере из соображений симметрии сразу ясно, что эти реакции одинаковы и направлены вверх, поскольку горизонтальные нагрузки отсутствуют. Эти реакции уравновешивают внешние нагрузки и равны соответственно
RA = RF = 100 H.
В узле А сходятся стержни 1, 2, и к нему же приложена сила реакции
RA. Поскольку неизвестных величин только две – это усилия S1 и S2 в стержнях 1 и 2 – можно начинать расчет с этого стержня. С учетом того, что усилия в стержнях направлены от узла А, проектируем все величины на ось х (горизонтальную) и ось у – вертикальную. Получим два уравнения:
S2 S1 cos 450 0,
RA S1 cos 450 0.
Из этой системы двух уравнений определяются две неизвестных величины:
S1 = - 141(H), S2 = 100 (H).
Теперь можно рассматривать равновесие узла В – в нем сходятся три стержня – 1, 2, 3, но в одном из них, в стержне 1, усилие S1 уже определено. Поэтому можно составить тоже два уравнения (опять имея в виду, что направления всех усилий – от узла В):
S4 S3 cos 450 S1 cos 450 0,S1 sin 450 S3 sin 450 0.
Отсюда определяются еще два усилия:
S3 = 141 (H), S4 = - 200 (H).
Теперь можно рассматривать равновесие узла С. В нем сходятся четыре стержня – 2, 3, 5, 6 – и приложена внешняя нагрузка, но в двух стержнях усилия уже определены. Поэтому из двух уравнений равновесия узла С
S6 S5 cos 450 S3 cos 450 S2 0,
S5 sin 450 S3 sin 450 100 0
определяются еще два усилия
S5 = 0, S6 = 200 (H).
Нет смысла считать усилия в остальных узлах фермы – они определяются из соображений симметрии.
Вообще при проведении расчетов рекомендуется сразу составить таблицу, куда по мере определения усилий следует заносить их значения. Такая таблица в этом примере имеет вид:
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
|
|
|
|
|
|
- 141 H |
100 H |
141 H |
- 200H |
0 |
200 H |
|
|
|
|
|
|
По знакам усилий сразу можно определить, какой из стержней сжат, какой растянут. Пятый стержень фермы не напряжен, т.е. в нем усилия отсутствуют. Но это вовсе не значит, что он не играет никакой роли. Если посмотреть на таблицу, то стержень 4 – и симметричный ему – сжаты, при малейшем отклонении узла Е от его положения такая система придет в движение – ферма «сложится». Поэтому такого рода стержни (№ 5), несмотря на нулевые напряжения в них, играют очень важную роль.
Качественно можно проверить, насколько верно наше решение, из следующих соображений. Представим, что вместо фермы нагружена балка такого же сечения, как контур фермы. Тогда она должна прогибаться вниз под действием приложенных сил, но это значит, что нижние горизонтальные слои балки должны удлиниться, и в них возникают растягивающие (положительные) усилия. Соответственно при укорочении верхних слоев балки в них должны появиться сжимающие (отрицательные) усилия. В нашем случае в стержне 4 эти усилия отрицательны, в стержнях 2 и 6 – положительны.
Метод сечений
Этот метод используется, когда по некоторым соображениям нам нужны усилия не во всех стержнях, а в каких-либо конкретных. Суть метода заключается в том, что проводится сечение через те стержни, усилия в которых нам нужно определить. Одна часть фермы после этого отбрасывается, а действие ее на оставшуюся часть фермы заменяется усилиями в стержнях, попавших в сечение. По сравнению с методом вырезания узлов объем расчетов может быть существенно сокращен – там мы по сути метода проходим последовательно по всем узлам, чтобы найти усилия в стержнях, и это иногда требует много «лишней» работы.
Рассмотрим пример использования такого метода.
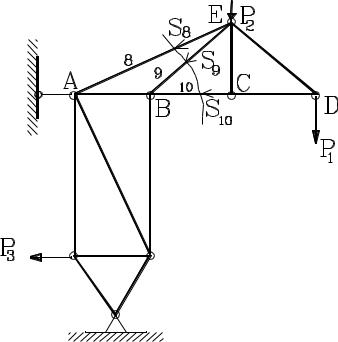
Пример 1.21
На ферму, изображенную на схеме, действуют нагрузки Р1 = 20 kH, Р2 = 10 kH, Р3 = 30 kH, причем сама ферма закреплена в узлах – нижнем и в узле А. Найти усилия в стержнях, обозначенных на схеме как 8, 9 и 10. AB = BC = CD = CE = a.
Р е ш е н и е.
В соответствии с методом проводим линию сечения – она показана на схеме волнистой линией. Отбрасываем левую часть фермы, а равновесие оставшейся правой части обеспечим за счет введения усилий S8, S9 и S10, причем направляем их, как и ранее, от узлов оставшейся части фермы.
Для определения усилия S8 рассмотрим условие равновесия моментов относительно точки В – через нее проходят стержни 9 и 10, поэтому в уравнение моментов усилия в этих стержнях не войдут. Учтем, что плечо усилия S8 относительно точки В равно
h = а·cos BAE = a · AC/AE = a · 2/ 5.
Тогда уравнение имеет вид
S8 · h – P2 · a – P1 · 2a = 0,
Откуда
S8 112 kH.
Для определения S9 составим уравнение моментов относительно точки А – через нее проходят стержни 8 и 10, и соответствующие усилия в это уравнение не войдут. Плечо усилия S9 относительно точки а будет равно а · cos450. Тогда уравнение моментов:
S9 · a · cos450 – P2 · 2a – P1 · 3a = 0,
-
Откуда
S9 -113 kH.
Наконец, для определения усилия S10 составим уравнение моментов относительно узла Е, поскольку линии действия усилий в стержнях 8 и 9 проходят через этот узел, и в уравнение моментов не войдут. Уравнение принимает очень простой вид:
S10 · a + P1 · a = 0,
Откуда
S10 = -20 kH.
Из полученных результатов следует, что стержень 8 растянут, а стержни 9 и 10 – сжаты.
Если бы мы шли по схеме метода вырезания узлов, например, в порядке нумерации узлов, начиная с нижних, то эти же результаты мы все равно получили, но много большими затратами сил.
1.4. Центр тяжести
Отыскание центра тяжести – частный случай решения задачи о равнодействующей системы параллельных сил.
Координаты центра параллельных сил (точки приложения равнодействующей) определяются формулами
|
|
|
n |
|
|
|
n |
|
|
|
n |
|
|
|
|
|
( Fk xk ) |
|
|
|
( Fk yk ) |
|
|
|
( Fk zk ) |
|
|
x |
|
|
k 1 |
, y |
|
|
k 1 |
, z |
|
|
k 1 |
. |
|
C |
n |
C |
n |
C |
n |
||||||||
|
|
|
|
|
|
(*) |
|||||||
|
|
|
( Fk ) |
|
|
|
( Fk ) |
|
|
|
( Fk ) |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
k 1 |
|
|
|
k 1n |
|
|
|
k 1 |
|
Здесь xk, yk, zk – координаты приложения сил Fk, k = 1, 2,…, n, знаки плюс или минус выбираются в соответствии с тем, как проектируются силы на оси системы координат. Положение центра параллельных сил не меняется всей системы сил на один и тот же угол.
Силы тяжести можно с достаточной для практических целей точностью считать параллельными, хотя на самом деле они сходятся в центре Земли. Так, для двух точек на поверхности Земли, отстоящих друг от друга на 31 м, угол между силами тяжести составляет одну угловую секунду. Такой угол можно не принимать во внимание.
Формулы для координат центра тяжести системы материальных точек имеют точно такой же вид, что и (*), только можно считать знаки одинаковыми. Тогда для центра тяжести системы материальных точек
x |
|
|
Pk xk |
, y |
|
|
Pk |
yk |
, z |
|
|
Pk zk |
. |
C |
P |
C |
P |
|
C |
P |
|||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Здесь Рk – масса к-той точки, Р – сумма масс всех точек.
В случае, когда рассматривается твердое тело, можно разделить его на достаточно малые части, центры тяжести которых можно считать совпадающими с их геометрическими центрами. Для однородного тела масса пропорциональна объему, и тогда
x |
|
|
vk xk |
, y |
|
|
vk |
yk |
, z |
|
|
vk zk |
. |
C |
V |
C |
V |
|
C |
V |
|||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Здесь vk – объем к-той частицы,V – объем всего тела.
Аналогичные формулы можно записать для плоской фигуры и пространственной линии. В случае непрерывных распределений масс по объему, по поверхности или вдоль линии следует использовать формулы вида: