

Основы автоматизированного проектирования радиоэлектронных устройств (часть 2)
..pdf41
присоединенную систему уравнений и вычислив дважды произведение векторов, согласно уравнения (8.88).
Анализ шумов. Как уже отмечалось, наиболее важными шумовыми составляющими электронных схем являются - дробовой, тепловой и фликкер шумы. Два первых типа имеют вполне однозначную природу и выражения для их интенсивности. Третий вид шумов не поддается четкому описанию, и используются эмпирические соотношения.
Шумы обычно представляются в виде некоррелированных источников. Любую пару коррелированных источников шума, всегда можно представить набором некоррелированных источников, причем дополнительные источники включаются между исходными и имеют интенсивность, равную взаимной спектральной плотности источников.
Предметом анализа шумов является обычно определение вклада в выходной сигнал, как шумов источника сигнала, так и внутренних шумов устройства, т.е. речь, может идти о вычислении соотношения сигнал/шум на выходе устройства.
Интенсивность источников шума описывается спектральной плотностью, т.е. мощностью шумов, приходящейся на единицу полосы частот, таким образом, информация о фазе теряет смысл, что препятствует использованию принципа суперпозиции в обычном смысле. Поскольку спектральными плотностями в нашем подходе пользоваться неудобно, поэтому, учитывая, что спектральные плотности пропорциональны квадратам токов либо напряжений источников, опишем их интенсивность, как корень квадратный из спектральной плотности. Для учета независимости источников, т.е. исключения информации о фазе, вклад каждого источника будем рассматривать независимо.
Таким образом, необходимо последовательно рассчитать цепь с каждым из источников. Суммарная амплитуда источников на выходе равна корню квадратному из суммы квадратов каждого из вкладов. В сложных цепях число шумовых источников велико и могло бы потребоваться многократное решение системы уравнений. Однако, как было показано ранее, можно воспользоваться решением присоединенной системы уравнений, что позволит существенно сократить объем вычислений.
Формально наша задача сводится к решению систем
T Xi ti Wi , |
(8.90) |
где i 0, ,m; ti - интенсивность i - го источника.
Выходная величина, как известно, есть линейная комбинация
компонент вектора решений |
|
|
|
|
|
|
d t |
X |
i |
. |
(8.91) |
||
1 |
|
|
|
|
|
|
Подставляя решение уравнения (8.90) в (8.91) получаем |
|
|||||
d t T 1 t |
i |
W t |
i |
Y t W , |
(8.92) |
|
1 |
i |
|
i |
|
||
где Y t - решение присоединенной системы |
|
|
|
|||
T t |
Y d . |
|
|
(8.93) |
||
42
Индекс i 0 соответствует источнику входного сигнала, индексы i 1, ,m соответствуют источникам шума.
Таким образом, при расчете шумов вначале находим решение присоединенной системы, а затем определяем вклад каждого источника в выходную величину. Так как каждый вектор Wi содержит информацию об
одном источнике и включает не более двух ненулевых компонент 1 , то вычисление вклада сводится к одному вычитанию компонент yi .
Амплитуду сигнала на выходе обозначим через 0 , а амплитуду шумов представим выражением
m |
|
2 |
1 / 2 |
|
|
AN ( |
i |
. |
|||
|
) |
||||
i 1 |
|
|
|
|
Интенсивности ti зависят от типа элемента, так для тепловых шумов ti 
 4 k T f Gi ,
4 k T f Gi ,
где k - постоянная Больцмана; T - температура в градусах Кельвина; f - ширина полосы; Gi - проводимость.
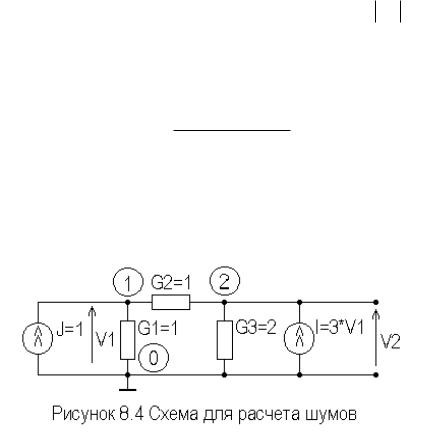
В качестве примера, вычислим соотношение сигнал/шум схемы, изображенной на рисунке 8.4.
Шумами зависимого источника пренебрежем, источник сигнала полагаем не шумящим. Узловая система уравнений для схемы имеет вид
G1 G2 |
G2 |
|
v1 |
|
J |
|||
G g G G |
|
v |
|
|
0 |
. |
||
|
2 |
2 3 |
|
2 |
|
|
|
|
Подставляя конкретные значения, запишем присоединенную систему уравнений T t Y d в виде
2 |
4 y1 |
|
0 |
|
|
||
|
3 |
|
|
|
|
|
, |
1 |
|
y2 |
|
1 |
|
|
|
решив которую, получим
y1 |
|
2 |
|
Y |
|
|
. |
y2 |
|
1 |
|
Найдем сигнал на выходе цепи, используя соотношение (8.92)
0 t0 Y t W0 2 2 |
1 |
|
|
1 |
|
4 . |
|
|
0 |
|
|

43
Амплитуды шумов, обусловленные G1 , G2 , G3 , соответственно равны
|
|
|
|
|
1 t1 Y t W1 t1 2 |
1 |
1 |
|
|
|
|
|
||
|
|
|
|
|
|
2 t1 , |
|
|
||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
2 t2 Y t W2 t2 2 |
1 |
1 |
|
t2 , |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
|
|
|
|
|
3 t3 Y t W3 t3 2 |
|
0 |
|
|
|
|
|||
|
|
|
|
|
1 |
t3 . |
|
|
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Найдем амплитуду шума на выходе |
|
|
|
|
|
|
|
|||||||
|
|
( 4 t2 |
t2 |
t2 |
)1/ 2 |
|
( 4 G G G )1/ 2 |
|
|
|||||
A |
N |
4 k T f |
|
28 k T f |
||||||||||
|
1 |
2 |
3 |
|
|
|
1 |
|
|
2 |
3 |
|
|
|
и соотношение сигнал/шум на выходе цепи
4 / 
 28 k T f Gi .
28 k T f Gi .
На этом завершим раздел по расчету чувствительностей РЭУ и их приложений для вычисления других характеристик.
44
9 РАСЧЕТ ЦЕПЕЙ ПО ПОСТОЯННОМУ ТОКУ
9.1 Алгоритм Ньютона – Рафсона
Определение рабочей точки или расчет электрических цепей по постоянному току является обычно первым шагом при анализе нелинейных схем. Дело в том, что от режима работы, т.е. рабочей точки, существенно зависят параметры нелинейных элементов – диодов, транзисторов и так далее и, соответственно, характеристики нелинейных устройств. Математической моделью цепи по постоянному току является, в общем случае, система нелинейных алгебраических уравнений. При расчетах цепей по постоянному току используются нелинейные статические модели элементов. Реактивные элементы схемы в этом случае исключаются – конденсаторы, заменяются ветвями ХХ, а катушки индуктивности - ветвями КЗ. Аналитические решения нелинейных алгебраических систем, как правило, отсутствуют и используются итерационные методы, позволяющие определить приближенное решение с любой наперед заданной точностью.
Расчет по постоянному току включает в себя определение установившихся напряжений и токов цепи при включении источников питания и требует в общем случае решения систем нелинейных алгебраических уравнений. Наиболее распространенным алгоритмом решения систем нелинейных алгебраических уравнений является алгоритм Ньютона–Рафсона. В этом разделе предстоит рассмотреть данный алгоритм применительно к наиболее известным методам формирования математических моделей электронных схем – обобщенному узловому, табличному, модифицированному узловому и модифицированному узловому с проверкой.
Алгоритм Ньютона–Рафсона. Алгоритм Ньютона–Рафсона часто используется как один из методов отыскания корней полиномов и имеет квадратичную сходимость при хорошем начальном приближении.
В скалярном представлении, при решении в общем случае нелинейного уравнения вида f(x)=0, итерации вычисления очередного решения определяется выражением
k 1 k k k f ( k ) / f ( k ) , |
(9.1) |
где k - номер итерации.
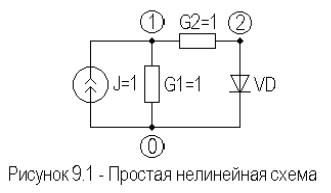
Для некоторых простейших цепей возможно исключение промежуточных переменных и сведение задачи к поиску решения одного нелинейного уравнения. Для иллюстрации итерационной природы алгоритма рассмотрим подобный пример для схемы, изображенной на рисунке 9.1.
45
Пусть вольтамперная характеристика полупроводникового диода определяется упрощенным выражением
iD exp( 40 VD ) 1 ,
здесь использовано VD / T VD / 25.6 [ мВ ] 40 VD .
Значения номиналов других ветвей приведены на рисунке 9.1.
Узловая система уравнений для данной схемы запишется в виде
3 v1 2 v2 1 ,
2 v1 2 v2 (exp( 40 v2 ) 1 ) 0.
Поскольку v1 входит в оба уравнения линейно, исключим это напряжение, выразив из первого уравнения v1 , через v2
v1 1 / 3 2 / 3 v2 ,
и, подставив его во второе уравнение, получим
f ( v2 ) 2 / 3 v2 exp( 40 v2 ) 5 / 3 0.
Производная от этой функции-выражения запишется
f ( v2 ) 2 / 3 40 exp( 40 v2 ) 0.
Приняв в качестве начального значения v20 0.1 В и, подставив
полученные выражения в (9.1), в результате итераций с заданной точностью, получим установившееся значение v2 1.264388 E 2 В , откуда однозначно
следует v1 3.417626 E 1 В .
Небольшое изменение цепи, например замена проводимости G1
диодом, приведет уже к двум нелинейным уравнениям, поэтому целесообразно рассмотреть развитие метода Ньютона–Рафсона применительно к системе нелинейных алгебраических уравнений.
Рассмотрим систему n n нелинейных уравнений с n n переменными xi f1 ( x1 ,x2 ,...,xn ) 0;
f2 ( x1 ,x2 ,...,xn ) 0;
fn ( x1 ,x2 ,...,xn ) 0.
Обозначим вектор переменных через X , а вектор функций через F , тогда, в
общем виде, эту систему можно записать как |
|
F( X ) 0 . |
(9.2) |
46
Опишем решение системы нелинейных уравнений (9.2) основанное на ее линеаризации. Линеаризация представляет собой достаточно распространенный прием преобразования нелинейной системы в линейную систему, путем разложения ее в окрестности предполагаемого решения в ряд Тейлора и удержания первых линейных членов ряда, включая первые производные.
Итак, предполагая, что система имеет решение X , разложим каждую функцию системы в ряд Тейлора в окрестности предполагаемого решения
f ( x*) f ( x ) |
f1 |
( x * x ) |
f1 |
( x * x ) |
f1 |
( x * x |
) ; |
||||||||||
|
|
|
|
|
|
|
|||||||||||
1 |
1 |
|
1 |
2 |
|
|
|
|
|
n |
|
||||||
|
|
|
x1 |
x2 |
xn |
|
|||||||||||
f |
( x*) f |
( x ) |
f2 ( x * x ) |
|
|
f2 |
|
( x * x ) |
|
|
f2 |
|
( x * x |
) ; |
|||
|
|
|
|
|
|||||||||||||
2 |
2 |
|
1 |
2 |
|
|
|
|
|
n |
|
||||||
|
|
|
x1 |
|
x2 |
|
xn |
|
|||||||||
|
|||||||||||||||||
f |
( x*) f |
( x ) |
fn ( x * x ) |
|
|
fn |
( x * x ) |
|
|
fn |
( x * x |
) . |
|||||
|
|
|
|
|
|||||||||||||
n |
n |
|
1 |
2 |
|
|
|
|
|
n |
|
||||||
|
|
|
x1 |
|
|
x2 |
|
|
xn |
|
|||||||
Предположив, |
что X близко к X X X , |
|
|
пренебрежем членами |
|||||||||||||
выше первого порядка и запишем систему в линеаризованной форме
F( X*) F( X ) M ( X ) ( X * X ),
где
f1
x1f2
M ( X ) x1
...
f3x1
f1 ...
x2
f2 ...
x2
... ...
f3 ...
x2
f1xf2nxn
...
f3xn
матрица Якоби.
Если приравнять к нулю полученную систему уравнений, то решение
не будет точно равно X из-за пренебрежения членами более высокого порядка и будет равно некоторому новому значению X . Отклонение от точного решения зависит от того, насколько хорошо многомерная поверхность, соответствующая нелинейной системе, аппроксимируется многомерной плоскостью в окрестности решения соответствующей линеаризованной системы. Кроме того, известно, что при соблюдении ряда условий и, в частности, при наличии хорошего начального приближения, повторное решение линеаризованной системы, при использовании предыдущего решения, в качестве нового начального приближения, обеспечивает снижение погрешности решения.
Таким образом, мы пришли к понятию итерации, основанной на повторном решении системы и понятию сходимости решения, т.е.

47
уменьшении ошибки при использовании предыдущего решения для вычисления нового.
Используя верхние индексы для обозначения последовательности итераций, можем записать линеаризованную систему в виде
F( X k ) M ( X k ) ( X k 1 X k ) 0 .
Формально решение этого уравнения на текущей итерации запишется
X k 1 X k M 1 ( X k ) F( X k ). |
(9.3) |
На практике стараются обойтись без явного обращения матрицы Якоби.
Так некоторые авторы, предлагают использовать итерационные соотношения для вычисления обратной матрицы Якоби текущей итерации через известную обратную матрицу на предыдущей итерации. Если новую матрицу Якоби представить как
M k 1 M k M k M k ( E ( M k ) 1 M k ), |
(9.4) |
Тогда с определенным приближением можно записать |
|
( M k 1 ) 1 ( E ( M k ) 1 M k ) ( M k ) 1 , |
(9.5) |
где E - единичная матрица; M k - матрица приращения компонент матрицы Якоби на k - той итерации. Для малых приращений выражение (9.5) можем переписать в виде
( M k 1 ) 1 ( M k ) 1 ( M k ) 1 M k ( M k ) 1 . |
(9.6) |
Таким образом, получив однажды обратную матрицу и при условии малости приращений на очередной итерации, можно воспользоваться соотношением (9.6) для нахождения приближенного значения обратной матрицы следующей итерации. Использование этого соотношения, однако, ограничивается требованием обеспечения малости приращений. Обозначив
X k X k 1 X k , перепишем уравнение (9.3) в виде
M ( X k ) X k F( X k ). |
(9.7) |
Решение уравнения, т.е. вектор приращений |
X , найдем, например, с |
помощью LUфакторизации, а новое значение вектора переменных |
|
определим из уравнения |
|
X k 1 X k X k . |
(9.8) |
Совокупность уравнений (9.7) и (9.8) есть запись алгоритма Ньютона– Рафсона.
Отметим также, что если в соотношении (9.7) убрать знак минус в первой части, тогда знак минус появиться в соотношении (9.8) перед вторым слагаемым. Алгоритм имеет довольно быструю сходимость – квадратичную вблизи точки решения. Недостаток алгоритма заключается в необходимости вычисления матрицы Якоби на каждой итерации.
Можно показать, что цель алгоритма заключается в уменьшении нормы
ошибки от итерации к итерации |
|
F( X k 1 ) F( X k ) . |
(9.9) |
48
Для обеспечения сходимости зачастую используют модифицированную форму уравнения (9.8)
X k 1 X k t k X k , |
(9.10) |
где t k - параметр, выбираемый обычно в интервале ( 0 t k 1 ) |
для |
обеспечения сходимости, таким образом, чтобы выполнялось соотношение
(9.9).
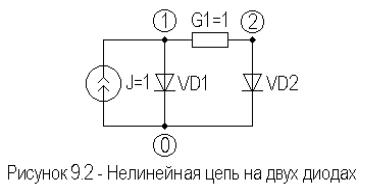
Проиллюстрируем применение алгоритма Ньютона-Рафсона, на примере решения системы нелинейных уравнений для двух диодной цепи, изображенной на рис.9.2.
Пусть каждый диод представлен упрощенной вольтамперной характеристикой
iD exp( 40 VD ) 1 ,
а начальные значения для напряжений на диодах, совпадающие с узловыми потенциалами, примем равными v10 v20 0.1 В.
Метод узловых потенциалов дает следующую систему уравнений iD1 G ( v1 v2 ) J ,
G ( v1 v2 ) iD2 0.
Раскрывая выражение для токов диодов, и подставляя численные значения, получаем
f1 ( v1 ,v2 ) exp( 40 v2 ) v1 v2 |
2 0 , |
f2 ( v1 ,v2 ) v1 v2 exp( 40 v2 |
) 1 0. |
Вектор нелинейных функций и Якобиан системы определяется выражениями
f1 ( v1 ,v2 ) J (exp( 40 VD1 ) 1 ), f2 ( v1 ,v2 ) (exp( 40 VD2 ) 1 ),
M ( v1 ,v2 |
) |
40 exp( 40 |
v1 ) 1 |
1 |
|
. |
|
|
1 |
|
40 exp( 40 v |
) 1 |
|||
|
|
|
|
||||
|
|
|
|
|
2 |
|
|
При заданных начальных значениях, нелинейные функции и Якобиан, равны
f1 52.59815 ; |
f2 53.59815 ; |
||
|
|
1 |
|
2184.926 |
|
||
M |
1 |
|
. |
|
2184.926 |
||
Решение исходной нелинейной системы дает
v1 0.0240844 ; v2 0.0245419 .
49
Прибавляя полученные значения к начальным приближениям, получим
v11 v10 v10 0.0759156 ; v12 v20 v20 0.0754581 .
Расчеты значений на ЭВМ, с точностью до пятого знака после запятой, дают следующие результаты для напряжений: v1 0.01712 В ; v2 0.00041 B .
Хотя начальное приближение далеко отстояло от полученного решения, алгоритм сошелся за 7 итераций.
Модификация Бройдена. Как уже отмечалось, алгоритм Ньютона– Рафсона имеет хорошую сходимость, однако требует вычисления матрицы Якоби, либо решения линеаризованной системы уравнений на каждом шаге итераций, что естественно ведет к большим затратам машинного времени. Бройденом была предложена модификация алгоритма Ньютона–Рафсона, лишенная этого недостатка. Модификация Бройдена имеет два следующих отличия:
1)на каждой итерации не формируют матрицу Якоби и не вычисляют обратную, не вычисляют дополнительные функции для получения численных оценок отклонения, а используют лишь функции, определяемые из постоянной матрицы схемы;
2)на каждой итерации рассчитывают коэффициент затухания, указывающей на сходимость и коэффициент позволяющий оценить ошибку вычисления до окончания решения.
Суть метода Бройдена заключается в использовании ранее
упоминаемого весового коэффициента t k , который, в модификации Бройдена, может быть больше единицы для обеспечения большей скорости сходимости
X k M 1 ( X k ) F( X k ) , |
(9.11) |
X k 1 X k t k X k . |
(9.12) |
Вместо M 1 ( X k ) , используется приближение к ней, вычисляемое на каждой итерации, в соответствии с выражением
H k 1 |
H k |
t k X k H k |
F( X k 1 ) F( X k ) X k t H k |
, |
(9.13) |
|
X k t |
H k F( X k 1 ) F( X k ) |
|||||
|
|
|
|
где H 0 ( M 0 ) 1 _ обратная матрица Якоби при начальном значении.
Таким образом, модификацию Бройдена, алгоритма Ньютона–Рафсона, можно представить следующей последовательностью действий.
1. Задание начального значения вектора переменных X 0 .
2 Вычисление начального значения H 0 путем обращения матрицы Якоби ( M 0 ) 1 .
3.Вычисление F( X k ).
4.Вычисление X k H k F( X k ).
50
5. Выбор t k , при котором F( X k 1 ) F( X k ) . 6. Расчет X k 1 X k t k X k .
7.Проверка нормы вектора F( X k 1 ) на сходимость.
8.Расчет F( X k 1 ) F( X k ).
9.Вычисление H k 1 по соотношению (9.13).
10.Повторение вычислений, начиная с этапа 4.
9.2 Формирование нелинейных математических моделей
Обобщим, ранее изложенные методы формирования математических моделей линейных схем, на нелинейные схемы. Как и прежде, рассмотрим наиболее распространенные прямые методы формирования математических моделей – обобщенный метод узловых потенциалов, табличный, модифицированный табличный, модифицированный узловой и модифицированный узловой с проверкой.
При отыскании решения по постоянному току в цепи все катушки индуктивности закорачиваются (ветвь КЗ), а все конденсаторы исключаются, т.е. заменяются ветвью холостого хода (ХХ).
Обобщенный метод узловых потенциалов. Прежде всего, заметим,
что уравнения для узловых потенциалов требуют, чтобы резисторы с нелинейным сопротивлением описывались в форме
ib g(Vb ) . |
(9.14) |
Индекс b будет обозначать напряжения и токи ветвей, а индекс n используется для обозначения узловых переменных. Предполагается также, что все независимые источники представлены источниками тока.
Запишем закон Кирхгофа для токов ветвей и выразим напряжения
ветвей через напряжения узлов |
|
|
A ib 0 , |
|
(9.15) |
V At V . |
(9.16) |
|
b |
n |
|
Разделив все ветви на две группы – ветви независимых источников тока и |
||
другие, можем переписать соотношение (9.15) в виде |
|
|
A ib AJ |
iJ , |
(9.17) |
или, обозначив узловые токи J n |
|
|
J n AJ iJ , |
(9.18) |
|
окончательно получим |
|
|
A ib J n . |
(9.19) |
|
Подставив линейное уравнение ветви (9.14) в (9.19), получим |
|
|
A g(Vb ) J n , |
(9.20) |
|
а, используя (9.16), можем записать обобщенную форму узловых уравнений нелинейной цепи