

Предварительный расчёт системы [1]
1.1. Составление структурной схемы и математической модели
Структурная схема
системы регулирования представлена на
рисунке 1.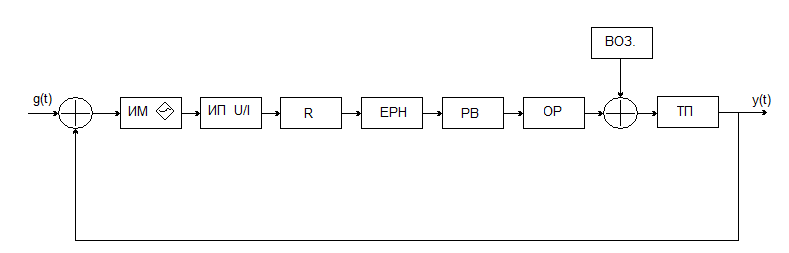
Рис. 1 – Структурная схема системы
На структурной схеме:
Теплообменник
(ОР):
 ,
,
 ,
,
 [3]
[3]
Термопара (ТП):
 ,
,
 ,
,
 [4]
[4]
Измерительный
мост (ИМ):
 ,
,

Измерительный
преобразователь (ИП):
 ,
,
 [5]
[5]
Регулятор:
ПИ-регулятор:
 .
.
ПИД-регулятор:
 .
[6]
.
[6]
Электропневматический
серводвигатель (EPH):
 ,
,
 .
[7]
.
[7]
Регулирующий
вентиль (РВ):
 ,
,
 [8]
[8]
А. Передаточная
функция возмущения -
 ,
, ,
, .
.
Тогда математическая модель будет выглядеть так (см. рис.2):
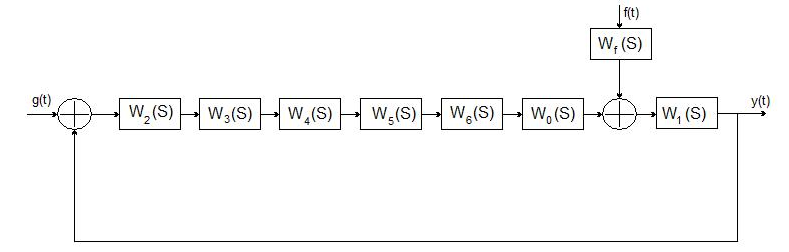
Рис. 2 – Математическая модель системы
1.2. Анализ системы
Определим передаточную функцию (в дальнейшем ПФ) разомкнутой системы:



ПФ замкнутой системы:

По критерию Гурвица проведём анализ устойчивости:
Для системы 3-го порядка должны выполняться следующие условия:
1. Все коэффициенты характеристического полинома должны быть положительными.
2. Должно быть
справедливо неравенство
 ,
где
,
где
 коэффициенты при
степенях характеристического полинома.
коэффициенты при
степенях характеристического полинома.
 ;
;
 .
.
Неравенство выполняется, следовательно, замкнутая система устойчива.
Построим логарифмические частотные характеристики (в дальнейшем ЛЧХ) разомкнутой системы (см. рис. 3):
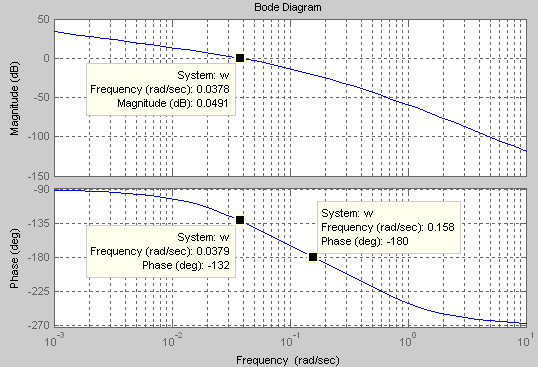
Рис. 3 – ЛЧХ разомкнутой системы
По рисунку 3 видно,
что запас устойчивости по фазе
 ,
по амплитуде
,
по амплитуде

Построим переходный процесс замкнутой системы (см. рис 4):
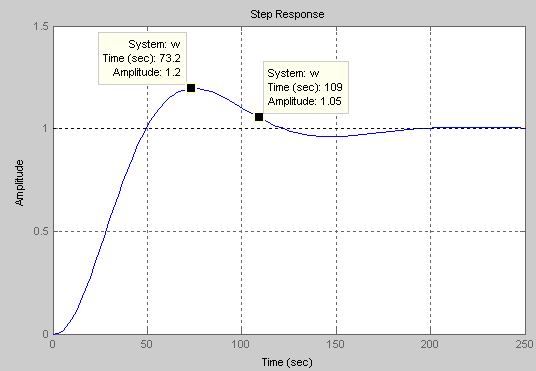
Рис. 4 – реакция замкнутой системы на ступенчатое воздействие
Полученная система имеет следующие показатели качества:
перерегулирование σ = 20%;
время регулирования tр =109 с.
Найдём установившуюся ошибку по задающему и возмущающему воздействию.
По задающему воздействию:
 ;
;
 .
.
По возмущающему воздействию:
 ;
;
 .
.
1.3. Расчёт параметров типовых регуляторов
Для того, чтобы уменьшить время регулирования и перерегулирование введём регуляторы.
Расчёт производится методом подбора параметров. Изучая ЛЧХ разомкнутой системы и переходную характеристику замкнутой системы, будем стремиться к максимуму запасов устойчивости по фазе и амплитуде (для разомкнутой системы) и к минимальным времени регулирования и перерегулирования (для замкнутой системы).
1.3.1. ПИ-регулятор
Подобранный ПИ-регулятор имеет следующие параметры:
 ;
;
 .
.
ЛЧХ разомкнутой системы с ПИ-регулятором представлены на рисунке 5.
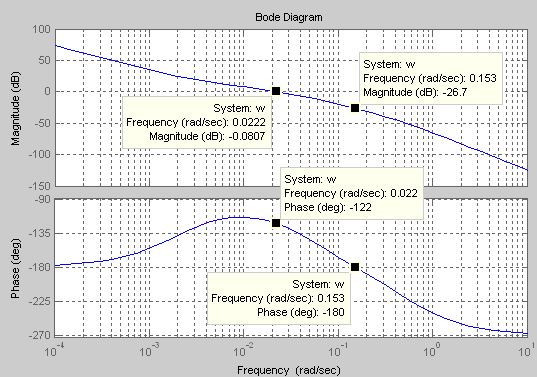
Рис. 5 – ЛЧХ разомкнутой системы с ПИ-регулятором
Полученная система имеет следующие показатели качества:
запас устойчивости по амплитуде ΔL= 27.3 дБ;
запас устойчивости по фазе Δφ= 58º;
На рисунке 6 показана реакция замкнутой системы на ступенчатое воздействие:

Рис. 6 – Переходная характеристика замкнутой системы с ПИ-регулятором
Полученная система имеет следующие показатели качества:
перерегулирование σ = 14%;
время регулирования tр =274 с.
По сравнению с исходной системой время регулирования уменьшилось, однако время регулирования увеличилось более чем в 2 раза.
1.3.2. ПИД-регулятор
Аналогично способу, описанному выше, производим подбор параметров ПИД-регулятора.
 ;
;


ЛЧХ разомкнутой системы с ПИД-регулятором представлены на рисунке 7.
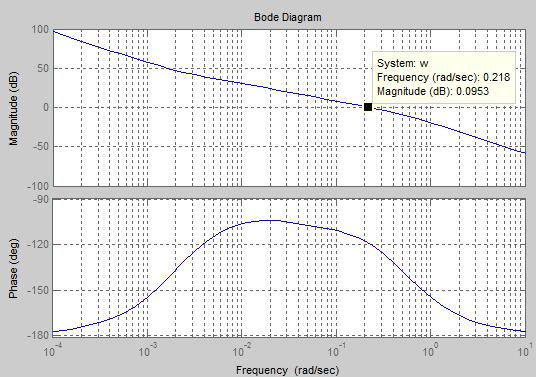
Рис. 7 - ЛЧХ разомкнутой системы с ПИД-регулятором
Полученная система не имеет запасов устойчивости по фазе и амплитуде.
Реакция замкнутой системы на ступенчатое воздействие представлена на рисунке 8.
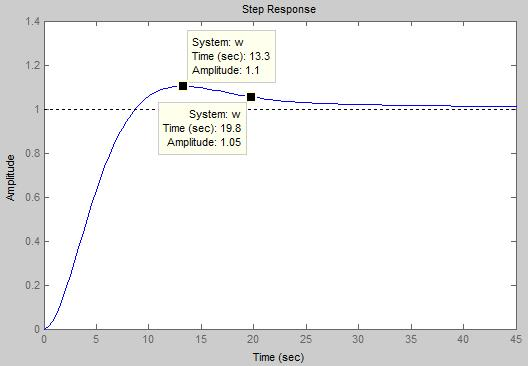
Рис. 8 - Переходная характеристика замкнутой системы с ПИД-регулятором
Полученная система имеет следующие показатели качества:
перерегулирование σ = 10 %;
время регулирования tр =19.8 с.
При использовании ПИД-регулятора время регулирования уменьшилось в 5.5 раз, а перерегулирование уменьшилось в 2 раза. Следовательно, при компьютерном моделировании будем рассматривать систему с ПИД-регулятором.
МОДЕЛИРОВАНИЕ СИСТЕМЫ
Моделирование проводим в среде МАТLАВ/SIMULINK. Т.к. ПИД-регулятор физически нереализуем, то для моделирования его ПФ используем апериодическое звено первого порядка с малой постоянной времени. Это не скажется на процессах в системе, но позволит выполнить моделирование. На рисунке 9 изображена линейная модель системы:
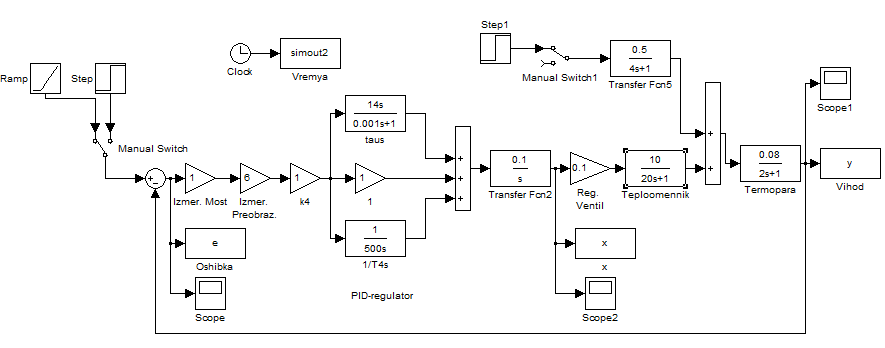
Рис. 9 – Линейная модель системы
Моделирование системы по задающему воздействию
2.1.1. Ступенчатое воздействие
На рисунке 10 показаны переходные процессы выходной величины y(t), ошибки e(t) и сигнала xi(t) на входе нелинейного элемента (в дальнейшем НЭ) при ступенчатом воздействии.
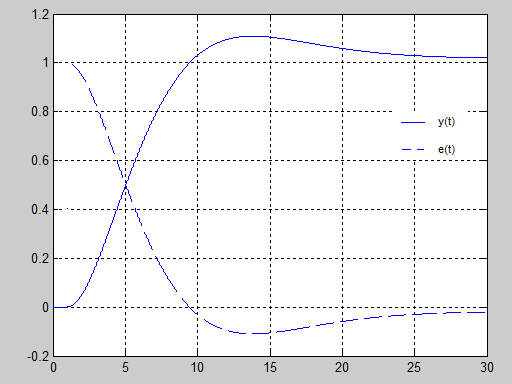
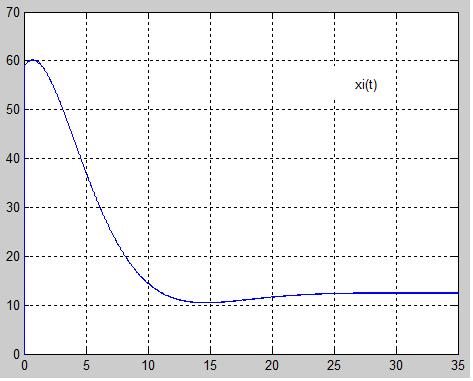
Рис. 10 – Переходные процессы в системе
εmax= 1; ymax= 1.1; хimax= 60
εуст= 0; yуст= 1, xiуст=12.5, σ = 10.3 %, tр =20.5 с.
Рассчитаем εуст.:



2.1.2. Линейно-нарастающее воздействие
На рисунке 11 показаны переходные процессы системы при линейно нарастающем воздействии:
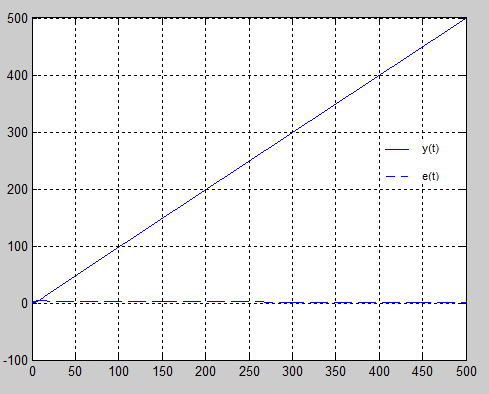
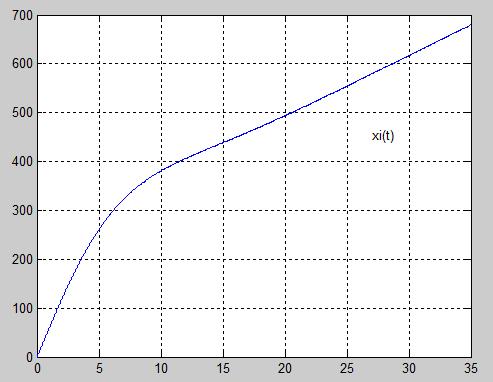
Рис. 11 – Переходные процессы в системе
εmax= 0.71; ymax= ∞; хimax= ∞.
εуст= 0; yуст= ∞; хiуст= ∞.
Рассчитаем εуст.:

2.2. Оптимизация параметров ПИД-регулятора
Проводим оптимизацию
средствами Мatlab/Simulink.
Получаем следующие параметры:
 ;
;

 Графики переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 12.
Графики переходных процессов ε(t),
у(t),
хi(t)
на входе НЭ при ступенчатом воздействии
представлены на рисунке 12.
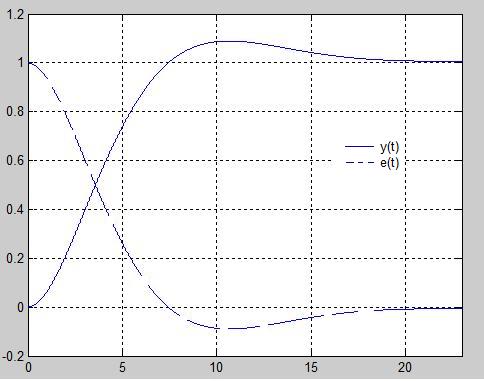
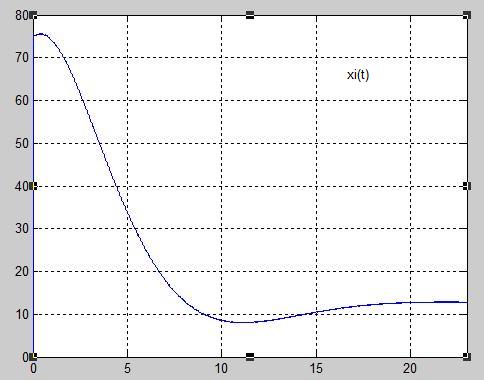
Рис.12 – Графики переходных процессов в системе
Полученная система имеет следующие показатели качества:
перерегулирование σ = 8.9 %;
время регулирования tр =14.5 с.
εmax= 1; ymax= 1.089; хimax= 75.
εуст= 0; yуст= 1; хiуст= 12.8.