

5.4. Построение профиля кулачка.
Для построения профиля кулачка применяем метод обращения движения: всем звеньям механизма условно сообщаем угловую скорость, равную -1. При этом кулачок остается неподвижным, а остальные звенья вращаются с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости кулачка.
Принимаем масштаб
построения ![]() .
Строим окружность радиусом r0
= 149,5мм, который равен расстоянию от
точки O, точки пересечения лучей, до
точки 0. Угол рабочего профиля кулачка
(
.
Строим окружность радиусом r0
= 149,5мм, который равен расстоянию от
точки O, точки пересечения лучей, до
точки 0. Угол рабочего профиля кулачка
(![]() )
разбиваем на 16 частей по 5.31°. Фиксируем
точки пересечения лучей проведенных
через 5.31° из точки O и окружности радиусом
r0.
Вдоль лучей от точек пересечения
откладываем отрезки, соответствующие
перемещениям толкателя в соответствующем
масштабе. Соединяя полученные точки
плавной кривой, получаем теоретический
профиль кулачка.
)
разбиваем на 16 частей по 5.31°. Фиксируем
точки пересечения лучей проведенных
через 5.31° из точки O и окружности радиусом
r0.
Вдоль лучей от точек пересечения
откладываем отрезки, соответствующие
перемещениям толкателя в соответствующем
масштабе. Соединяя полученные точки
плавной кривой, получаем теоретический
профиль кулачка.
Для получения
рабочего профиля кулачка строим
эквидистантный профиль, отстоящий от
теоретического на величину радиуса
ролика. Для этого из концов отложенных
отрезков перемещений проводим дуги
окружностей радиусом ролика. Радиус
ролика выбирают из ряда стандартных
размеров и по соотношению rp
= 0,2![]() r0.
Назначаем радиус ролика rp
= 29,9мм. Рабочий профиль получается как
огибающая к проведенным дугам окружностей.
r0.
Назначаем радиус ролика rp
= 29,9мм. Рабочий профиль получается как
огибающая к проведенным дугам окружностей.
5.5. Кинематическая проверка аналогов скорости и ускорения.
Проведём проверку скорости и ускорения в 4-ом положении. Заменим Высшую кинематическую пару, двумя низшими и дополнительным звеном. Получим механизм из 3-ёх звеньев ОA, AB4, B4C. Построим план скоростей для данного механизма, откуда найдём скорость точки В4.
![]()
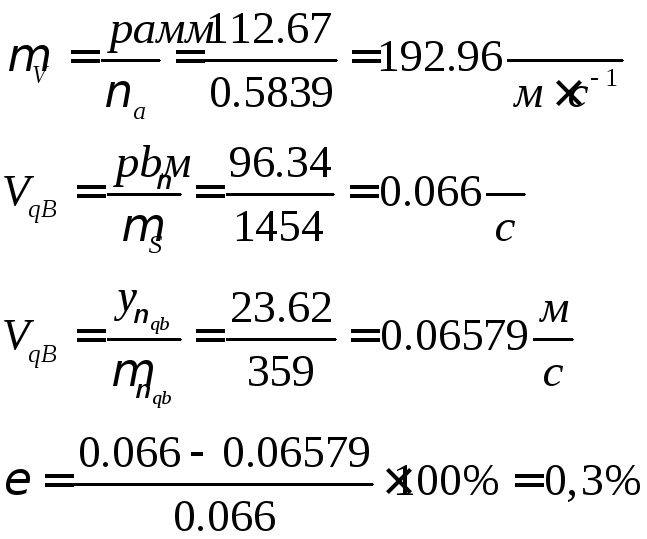

Выводы: Построили
кинематические диаграммы движения
толкателя с учётом заданного характера
изменения ускорений толкателя. Определили
основные размеры кулачкового механизма
наименьших габаритов с учётом максимально
допустимого угла давления
![]() .Построили
профиль кулачка. Сделали проверку
скорости и ускорения в 4-ом положении.
.Построили
профиль кулачка. Сделали проверку
скорости и ускорения в 4-ом положении.
Литература
«Теория механизмов и машин» под редакцией Фролова Н.В.
Попов С.А. «Курсовое проектирование по теории механизмов и машин»
Методическое пособие «Проектирование кулачковых механизмов» под редакцией Попова С.А.
Методическое пособие «Динамическое исследование механизмов при установившемся режиме работы» под редакцией Г.И. Насоновой.
Методическое пособие «Проектирование планетарных редукторов» под редакцией Попова С.А.