

775
.pdf3. ДИНАМИКА
Задания Д1У и Д2У
Привести краткий (примерно на 1–2 стр.) конспект, включающий ответы на следующие вопросы:
− законы механики Галилея-Ньютона; –дифференциальные уравнения движения материальной точки в декартовых координатах (в
форме Лагранжа) и в проекциях на естественные оси координат (в форме Эйлера);
–механическая система, ее масса; центр масс, силы, действующие на систему;
–моменты инерции системы и твердого тела относительно центра, оси, плоскости; радиус инерции;
–элементарная работа, работа и мощность постоянной и переменной силы;
–кинетическая энергия при поступательном, вращательном и плоском движении твердого тела, теорема об изменении кинетической энергии материальной точки и системы;
–принцип возможных перемещений;
–общее уравнение динамики.
Указания. При выполнении задания Д1У применить теорему об изменении кинетической энергии.
Краткая теоретическая справка
Теорема об изменении кинетической энергии
Теорему об изменении кинетической энергии можно представить как в дифференциальной, так и интегральной форме. В первом случае она формулируется следующим образом: производная по времени от кинетической энергии T равна мощности всех внешних и внутренних сил, действующих на систему:
dT/dt = ∑Wke + ∑Wki, |
(3.1) |
где Wke, Wki — мощности внешних и внутренних сил; k — индекс силы. Выражение (3.1) можно представить в несколько ином виде:
dT = ∑dAke + ∑dAki , |
(3.2) |
где dAke и dAki — элементарные работы равнодействующих внешних и внутренних сил, приложенных к точке.
Проинтегрировав обе части равенства в пределах перемещения системы, получим уравнение, выражающее теорему об изменении кинетической энергии механической системы в интегральной форме:
T1 − T0 = ∑Ake + ∑Aki , |
(3.3) |
согласно которой изменение кинетической энергии механической системы при ее некотором перемещении равно алгебраической сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил.
Для неизменяемой системы, в которой расстояние между точками приложения внутренних сил не изменяется (тела считаются абсолютно твердыми, нити нерастяжимыми, а связи идеальными), сумма работ внутренних сил равна нулю. Тогда:
T −T0 = ∑ Ake . |
(3.4) |
При поступательном движении твердого тела кинетическая энергия определяется по формуле
T = |
mv2 |
, |
(3.5) |
|
|||
2 |
|
|
|
где m — масса тела; v — скорость любой его точки.
В случае вращательного движения тела относительно неподвижной оси его кинетическая энергия определяется по формуле
T = |
J |
z |
ω2 |
|
|
|
|
, |
(3.6) |
||
|
2 |
||||
|
|
|
|
||
где Jz — момент инерции тела относительно оси вращения; ω — угловая скорость вращения тела.
60
В общем случае движения механической системы или тела кинетическая энергия складывается из кинетической энергии поступательного движения со скоростью центра масс C и кинетической энергии вращательного движения относительно оси, проходящей через центр масс:
|
mv2 |
J |
C |
ω2 |
|
||
T = |
C |
+ |
|
|
. |
(3.7) |
|
|
|
|
|
||||
22
Работой называется скалярное произведение вектора силы на вектор перемещения. Элементарной называется работа силы на бесконечно малом перемещении:
dA = F cosαds ,
где α — угол между направлением вектора силы и касательной к траектории точки; ds — бесконечно малое перемещение.
При конечном перемещении точки из положения М0 в положение М1 работа силы вычисляется как интегральная сумма элементарных работ:
M1 |
|
A = ∫ F cosαds . |
(3.8) |
M0 |
|
Работа постоянной силы на конечном прямолинейном перемещении определяется произведением модуля силы на модуль перемещения и на косинус угла между их направлениями:
A = Fs cos α . |
(3.9) |
Работа силы тяжести не зависит от траектории тела, а зависит лишь от изменения высоты его положения:
A = mgh . |
(3.10) |
Если сила приложена к телу, вращающемуся вокруг неподвижной оси, то ее работа равна:
ϕ1 |
|
|
|
A = ∫ Mz (F |
)dϕ , |
(3.11) |
|
ϕ0 |
|
||
где Mz (F ) — момент силы F относительно оси вращения. При постоянном моменте
A = M φ, |
(3.12) |
где φ — конечный угол поворота тела.
Задача для самоконтроля
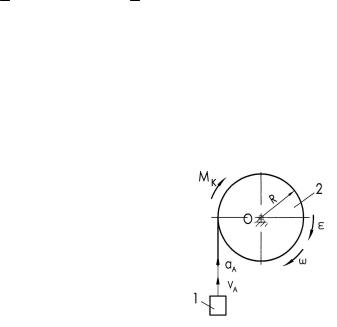
Задача 3.1. Груз 1 массой m (рис. 3.1) прикреплен к тросу, намотанному на барабан 2, к которому приложен постоянный вращающий момент МК. Известны момент инерции барабана относительно оси вращения J, радиус R.
Рис. 3.1
Определить:
−кинетическую энергию системы при скорости груза v;
−работу при подъеме груза на высоту h.
Записать общее уравнение динамики.
Общее уравнение динамики
Согласно принципу Даламбера, если в любой момент времени к телу или системе движущихся тел, к которым приложены активные силы и реакции связей, добавить силы инерции, то можно
61
считать, что система в данный момент времени находится в равновесии. Согласно принципу возможных перемещений для системы, находящейся в равновесии, сумма работ всех активных сил на виртуальных (возможных) перемещениях равна нулю. Если объединить оба принципа, то можно считать, что во всякой механической системе с идеальными связями сумма элементарных работ всех активных сил и сил инерции на виртуальных перемещениях равна нулю. Уравнение, отражающее этот принцип, называют общим уравнением динамики.
Общее уравнение динамики имеет вид:
∑δAai + ∑δAui = 0, |
(3.13) |
где ∑δAai, ∑δAui — суммы элементарных работ активных сил и сил инерции. Уравнение (3.18) можно записать также в виде:
∑(Fi − miai)δsi = 0, |
(3.14) |
где Fi — активные силы; miai — силы инерции равные произведению массы на ускорение с обратным знаком; δsi — возможные перемещения.
Задание Д1У
Применение теоремы об изменении кинетической энергии механической системы
Схема механизма, а также размеры шкивов выбираются из вариантов рисунков и табличных значений к заданию К1У.
Механическая система приходит в движение из состояния покоя под действием сил тяжести. Система содержит ступенчатые шкивы 1 и 2, смонтированные на осях О1, О2. Массы грузов A, А1, B, C: mA = 400 кг, mA1 = 150 кг, mВ = 100 кг и mС = 50 кг. Для вариантов 27, 40, 57, 58, 87 один из грузов выполнен в виде сплошного цилиндра, наружный диаметр которого равен 2r2. Размеры шкивов приведены в табл. К1.1. Массы систем шкивов в табл. Д1.1. Радиусы инерции относительно осей, проходящих через центры тяжести: ρ1 = r1 и ρ2 = r2 .
Коэффициент трения скольжения грузов по наклонным поверхностям f = 0,2. Моменты сопротивления вращению валов в опорах О1, О2 считаем постоянными и равными МС1 = МС2 = МС = 30 Н·м.
Определить скорости грузов в момент, когда груз А переместится на расстояние h. Необходимые для решения исходные данные выбрать из табл. Д1.1.
Нити, которые связывают элементы механической системы, следует считать невесомыми и нерастяжимыми, а их наклонные участки параллельными соответствующим наклонным плоскостям.
Указание. При выполнении задания Д1У применить теорему об изменении кинетической энергии.
62
|
|
|
|
|
|
|
|
|
Таблица Д 1.1 |
|
|
|
|
Исходные данные для задания Д1У |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
№ |
h, |
m1, |
|
m2, |
№ |
|
h, |
m1, |
|
m2, |
вар. |
м |
кг |
|
кг |
вар. |
|
м |
кг |
|
кг |
1 |
5 |
50 |
|
30 |
11 |
|
5 |
60 |
|
70 |
2 |
2 |
30 |
|
40 |
12 |
|
10 |
80 |
|
60 |
3 |
6 |
60 |
|
50 |
13 |
|
3 |
40 |
|
80 |
4 |
8 |
60 |
|
60 |
14 |
|
5 |
60 |
|
50 |
5 |
5 |
80 |
|
60 |
15 |
|
8 |
70 |
|
30 |
6 |
9 |
40 |
|
70 |
16 |
|
4 |
60 |
|
70 |
7 |
12 |
20 |
|
80 |
17 |
|
5 |
60 |
|
60 |
8 |
5 |
70 |
|
40 |
18 |
|
3 |
40 |
|
30 |
9 |
12 |
60 |
|
40 |
19 |
|
6 |
30 |
|
40 |
10 |
4 |
80 |
|
20 |
20 |
|
7 |
80 |
|
70 |
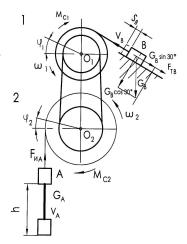
Пример
Механическая система (рис. 3.2) приходит в движение из состояния покоя под действием сил тяжести. Система содержит ступенчатые шкивы 1 и 2, смонтированные на осях О1, О2, массы шкивов m1 = 600 кг, m2 = 900 кг; радиусы инерции относительно горизонтальных осей, проходящих через центры тяжести: ρ1 = 0,3 м и
ρ2 = 0,4 м. Массы грузов А, В: mА =
= 400 кг, груза В mB = 100 кг. Коэффициент трения скольжения груза по наклонной поверхности f = 0,2. Моменты сопротивления при вращении валов в опорах О1, О2 считаем постоянными и равными: МС1 = МС2 = МС = 30 Н·м. Радиусы шкивов 1, смонтированных на оси
О1, R1 = 0,5 м, r1 = 0,2 м; радиусы шкивов 2: R2 = 0,6 м, r2 = 0,4 м.
Определить скорости грузов после того, как груз А опустится на высоту h =10 м.
При решении учитываются трение скольжения при перемещении груза по наклонной плоскости и моменты сопротивления вра- Рис. 3.2 щению валов.
Решение
Применим к решению задачи общее уравнение динамики. Поскольку система приходит в движение из состояния покоя, направления ускорений тел соответствуют направлениям их движения.
Силы трения направлены в сторону, противоположную направлению движения. Если направление движения системы выбрано ошибочно, то искомое ускорение получается со знаком минус. В этом случае необходимо изменить направления силы трения и сил инерции и внести соответствующие поправки в общее уравнение динамики.
1. Применим теорему об изменении кинетической энергии механической системы (3.4): T − T0 = ∑Akе .
Кинетическая энергия системы, содержащей грузы А, В, и шкивов 1 и 2:
T = TA + TB + T1 + T2 . |
(3.15) |
Кинетическая энергия в начальный момент времени, когда скорости всех тел равны нулю:
T0 = 0.
2. Определим кинетическую энергию системы.
Грузы А, В движутся поступательно. Кинетическая энергия грузов:
T = |
mAvA2 |
, T = |
mBvB2 |
, |
|
|
|||
A |
2 |
B |
2 |
|
|
|
|
где vA, vB — скорости, mА, mB — массы грузов. Шкивы совершают вращательное движение:
T = |
J ω2 |
; T = |
J |
ω2 |
|
1 1 |
2 |
2 |
; |
||
|
|
|
|||
1 |
2 |
2 |
2 |
|
|
|
|
|
|||
63
J1 = m1ρ12; J2 = m2 ρ22,
где J1 и J2 — моменты инерции; ρ1,ρ2 — радиусы инерции шкивов. Кинетическая энергия (3.13):
|
m v2 |
m v2 |
J ω2 |
J |
ω2 |
|
||||
T = |
A A |
+ |
B B |
+ |
1 1 |
+ |
2 |
2 |
. |
(3.16) |
|
|
2 |
2 |
|||||||
2 |
|
2 |
|
|
|
|
||||
3. Выразим скорости ω1 , ω2 ,vB через vA . Угловая скорость шкивов 2:
ω2 = vA / R2 .
Шкивы 2 кинематически связаны со шкивами 1 с помощью ременной передачи. Радиусы шкивов r2 иr1. Линейные скорости ремня и точек, находящихся на наружной поверхности шкивов, равны:
ω1 r1 = ω2 r2 .
Угловая скорость шкивов 1:
ω1 = ω2 r2 / r1 = vA r2 / r1 R2 = vA i/ R2 ,
где i = r2/r1.
Линейная скорость груза В:
vB = ω1 R1 = vA i R1 / R2 = vA i iR,
где iR = R1/R2.
Запишем выражение для кинетической энергии (3.14) через скорость vA :
|
m |
A |
v2 |
|
m |
B |
2 |
|
J |
1 |
v |
A |
i 2 |
||
Т = |
|
A |
+ |
|
(vA iiR ) |
+ |
|
|
|
|
|
||||
|
2 |
2 |
2 |
|
R2 |
|
|||||||||
|
|
|
|
|
|
|
|||||||||
|
J |
2 |
v |
A |
2 |
|
|
+ |
|
|
|
|
= |
||
2 |
|
R2 |
|
||||
|
|
|
|
||||
= |
vA2 |
( m |
|
+ m |
|
(ii |
|
)2 |
+ |
J1i2 |
+ |
J1i2 |
). |
(3.17) |
|
2 |
А |
B |
R |
R2 |
R2 |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|||
4. Работа внешних сил: |
|
|
|
|
|
|
|
|
|
|
|||||
|
∑Ake |
|
= АА − АВ − АТ − АМ1 − АМ2, |
(3.18) |
|||||||||||
где АА, АВ — работа при опускании груза А и подъеме груза В; АТ — работа силы трения груза В; АМ1, АМ2 — работа моментов сопротивления при вращении шкивов 1, 2.
Работа при опускании груза А на h:
АА = hmAg. Работа при подъеме груза В:
АВ = mВg sin30° sВ,
где sВ — перемещение груза В по наклонной поверхности; mВg sin30° — составляющая веса груза в направлении, обратном перемещению.
Сила трения по закону Кулона:
FТ = fNB = fmB g cos30° ,
где NB — сила нормального давления груза В на опорную поверхность; f — коэффициент трения.
Работа силы трения:
АТ = mВgf cos30° sВ.
Работа моментов сопротивления вращению шкивов:
АМ1 = МС1φ1; АМ2 = МС2φ2,
где МС1, МС2 — моменты сопротивления вращению шкивов 1 и 2; φ1, φ2 — углы поворота шкивов при перемещении груза А на h.
Работа внешних сил (3.18):
64
∑Ake = mAgh − (mBsin30o + FB )sB − MC1ϕ1 −MC2ϕ2 .
5.Выразим перемещение груза В − sB и углы поворота шкивов — ϕ1 , ϕ2через h. Перемещения связаны между собой так же, как соответствующие скорости vB = iiR vA, ω2 = vA / R2 :
sB = hiiR, ϕ2 = h/R2; ϕ1 = iϕ2 = ih/R2.
6. Запишем выражение для работы внешних сил через перемещение груза А с учетом того, что
МС1 = МС2 = МС:
∑Ake = mAgh − mBg(sin30° + f cos30° )hiiR – MC(1 + i)h/R2. (3.19)
Тогда уравнение (3.4) согласно (3.17), (3.19) примет вид:
|
|
|
|
|
vA2 |
|
|
|
|
|
|
|
|
2 |
|
|
J1 i2 |
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
( mА + mB (iiR) |
|
+ |
|
|
|
+ J2/R2 |
|
) = |
|
|
|
||||||||||
|
|
|
|
2 |
|
|
|
R 2 |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
= h( m |
А |
g − m |
В |
g(sin30° |
+ f cos30° )) iiR − M |
С |
(1 + i)h/ R . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||
7. Определим скорости vA , vB: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
M |
C |
(1+ i) |
|
|
|
|
|
|
|
|
o |
|
|
|
o |
|
|||||||
|
|
2h mAg − |
|
|
|
|
|
− mB giiR ( f cos30 |
|
+ sin30 ) |
||||||||||||||||||
|
|
|
|
R2 |
|
|
|
|||||||||||||||||||||
vA = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
+ |
J i2 |
+ J |
2 |
+ m i2i2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
m |
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
B |
R |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
vB = iiR vA = 5,645/0,6 = 9,4 м/c.
Ответ: vА = 5,645 м/с, vB = 9,4083 м/с
Задание Д2У
Общее уравнение динамики
Исходные данные: схема и размеры механизма выбираются из вариантов рисунков к заданию К1У, массы шкивов и грузов, а также остальные исходные данные соответствуют заданию Д1У. Механическая система под действием сил тяжести приходит в движение из состояния покоя.
Найти ускорение груза А, натяжения ветвей нитей и ремней ременной передачи.
Примечание. При выполнении задания Д2У применить общее уравнение динамики.
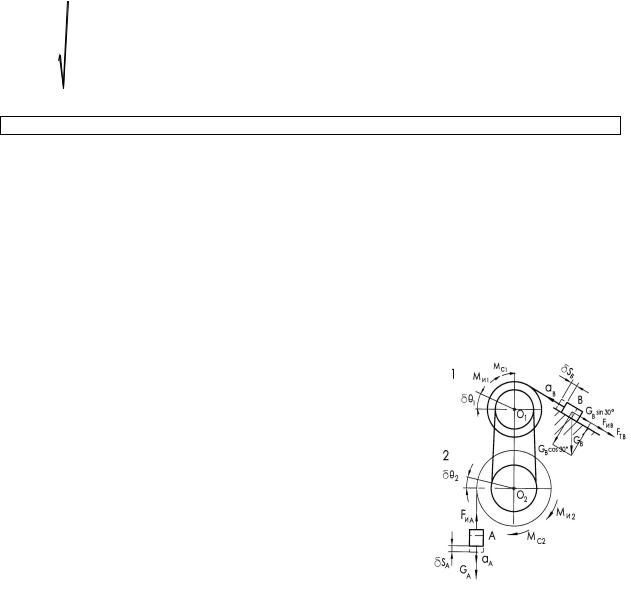
Пример
Механическая система показана на рис. 3.3. Под действием сил тяжести она приходит в движение из состояния покоя. Система содержит ступенчатые шкивы 1 и 2, смонтированные на осях О1, О2. Шкивы связаны ременной передачей.
Массы шкивов m1 = 600 кг, m2 = 900 кг; радиусы инерции относительно горизонтальных осей, проходящих через центры тяжести: ρ1 = 0,3 м и ρ2 =
=0,4 м. Массы грузов А, В: mА =
=400 кг, mB = 100 кг. Коэффициент трения скольжения груза по наклонной поверхности f =
=0,2. Моменты сопротивления при вращении валов в опорах О1, О2 считаем постоянными и равными: МС1 = МС2 = МС =
=30 Н·м. Радиусы ступенчатых шкивов 1: R1 = 0,5 м, r1 = 0,2 м; радиусы ступенчатых шкивов 2: R2 = 0,6 м, r2 = 0,4 м.
Найти ускорение груза А, натяжения ветвей нитей и ремней ременной передачи.
Решение
1. Активные силы и силы инерции показаны на рис. 3.3. Там же показано направление движения. Рис. 3.3
2. Кинематические уравнения.
65
Так как система имеет одну степень свободы, перемещения, скорости и ускорения ее элементов однозначно определяются перемещениями, скоростями и ускорениями одного из них, например, груза А.
Будем считать, что груз А под действием силы тяжести перемещается вниз с ускорением аА, а его возможное перемещение δsA.
Центры тяжести шкивов 1 и 2 неподвижны. Угловые скорости ω1, ω2 и ускорения ε1, ε2 шкивов определяются из соотношений:
ω2 = vA/R2; ω1 = i ω2; ε2 = аА/R2; ε1 = i ε2, где vA — скорость груза; i = r2/r1.
Груз В перемещается вверх по наклонной плоскости с ускорением аВ:
аВ = ε1R1 = iε2R1 = аАiiR; iR = R1 /R2.
Зависимости между возможными перемещениями такие же, как между соответствующими скоростями:
δθ2 = δsA/R2; δθ1 = iδθ2; δsВ = δsA iiR, |
(3.20) |
где δθ2, δθ1 — углы поворотов шкивов 1, 2; δsВ — перемещение груза В. 3. Определение силовых факторов.
Движение системы происходит под действием силы тяжести груза А:
GA = mAg.
Сила инерции груза А, который движется поступательно с ускорением аА,
FИА = mAаА
направлена противоположно направлению аА.
При опускании груза А шкивы вращаются против часовой стрелки, в эту же сторону направлены угловые ускорения, а моменты касательных сил инерции МИ1 и МИ2 так же, как и моменты сопротивления МС1, МС2, — в противоположную сторону:
МИ1 = J1ε2; МИ2 = J2ε2,
где моменты инерции J1 = m1ρ12; J2 = m2ρ22.
Груз В перемещается вверх по наклонной плоскости. Составляющая веса груза GВ = mВg направлена параллельно опорной плоскости в сторону, противоположную направлению движения:
FGВ = GВ sin30°.
Так же направлена сила трения, которая равна произведению силы нормального давления на коэффициент трения:
FТВ = GВ cos30° f.
Cила инерции направлена вниз параллельно наклонной плоскости, в направлении, противоположном направлению аВ, и равна:
FИВ = mВаВ.
4. Общее уравнение динамики.
Составим общее уравнение динамики (3.19) с учетом того, что работа центробежных сил инерции и реакций идеальных связей равна нулю:
(GA − FИА)δsA − (МИ2 + МС2)δθ2 − (МИ1 + МС1)δθ1 −
– (FИВ + FТВ + GВ sin30°)δsВ = 0.
После подстановки (3.20) и деления на δsA уравнение имеет вид: mA(g − аА) − [(J2аА + МСR2) + (J1аА + МСR2)(1 + i)]/R22−
− mВ[аАiiR + g(fcos30° + sin30°)] iiR = 0.
Тогда
|
|
= |
m |
A |
g − M |
C |
(1+ i)/ R |
− m gii |
R |
( f cos30o + sin30o ) |
|
||||||
a |
|
|
|
|
|
2 |
|
B |
|
|
|
. |
|||||
A |
|
|
|
m |
|
+ (J i2 |
+ J |
|
)/ R |
2 |
+ m |
i2i2 |
|||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
A |
2 |
|
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
2 |
B |
R |
|
|||
5. Численное решение.
Определим численные значения моментов инерции шкивов J1, J2 и передаточных отношений i,
iR:
66
J1 = m1ρ12 = 54 кг·м2; J2 = m2ρ22 = 144 кг·м2; i = 2; iR = 5/6.
После подстановки всех численных значений в уравнение получим: аА = 1,59 м/с2.
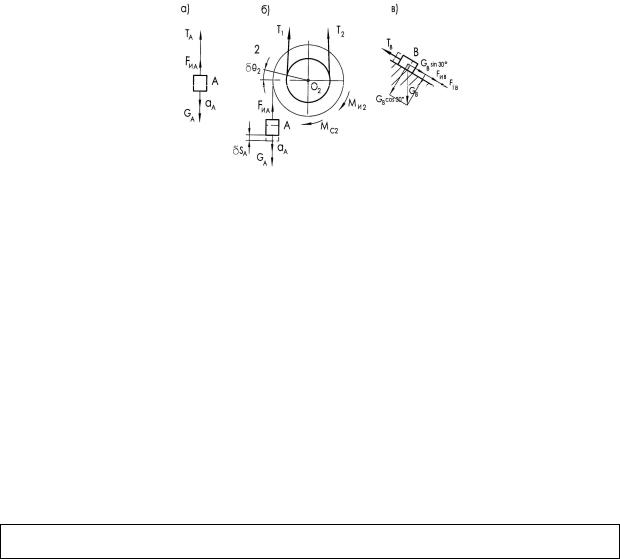
6. Натяжение нитей.
Для определения натяжения нити, на которой подвешен груз, мысленно разрежем нить и заменим ее действие на груз А реакцией ТА (рис. 3.4, а). Используя принцип Даламбера, приравняем нулю проекции всех сил, включая силы инерции, на ось, которая совпадает с осью нити, найдем силу ее натяжения ТА:
ТА = mA(g − аА) = 3,29 кН.
Рис. 3.4
Для определения разности натяжения ветвей ремня ременной передачи мысленно разрежем этот ремень (рис. 3.4, б). Разность натяжения ветвей ремня Т1 и Т2 создает момент относительно оси О2:
МР2 = (Т1 − Т2)r2.
Составим общее уравнение динамики для отсеченной части:
(GA− FИА)δsA − (МИ2 + МС2 + МР2)δθ2 = 0.
После подстановки зависимостей (3.20) и деления на δsA уравнение имеет вид: МР2 = ТАR2 − МИ2 − МС2 = 1,56 кН·м;
(Т1 − Т2) = МР2/r2 = 3,9 кН. Момент относительно оси О1:
МР1 = (Т1 − Т2)r1 = МР2/i = 0,78 кН·м.
Определим натяжение нити, связывающей груз В со шкивами 1 (рис. 3.4, в). Используя принцип Даламбера, получим:
ТВ = mВ[g(sin30° + f cos30°) + аВ] = 0,925 кН, где ТВ — натяжение нити; аВ — ускорение груза В.
аВ = аАiiR = 2,65 м/с2.
Ответ: аА = 1,59 м/с2; аВ = 2,65 м/с2; ТА = 3,29 кН; (Т1 − Т2) = 3,9 кН; ТВ = 0,925 кН.
ОТВЕТЫ К ЗАДАЧАМ ДЛЯ САМОКОНТРОЛЯ
Задача 1.1, а (рис. 1.1, а)
Проекции равнодействующей на оси X, Y: ∑FX = −2 Н; ∑FY = 6,196 Н.
Модуль равнодействующей:
R = 6,51 Н. Главный момент относительно точки О:
∑mO = −246 Н·см.
67

Задача 1.1, б (рис. 1.1, б)
∑FX = −2,44 Н; ∑FY = 0,293 Н; R = 2,46 Н; ∑mO = 17,6 Н·см.
Задача 1.2, а (рис. 1.2, а)
Проекции равнодействующей на оси X, Y:
∑FX = −0,5145 Н; ∑FY = 0; ∑FZ = 2,8575 Н. Модуль равнодействующей:
R = 2,903 Н.
Моменты относительно осей X, Y, Z:
∑mX = 11,43 Н·см; ∑mY = − 8,57 Н·см; ∑mZ = 2,06 Н·см. Главный момент относительно точки О:
∑mO = 14,4 Н·см.
Задача 1.2, б (рис. 1.2, б)
Проекции равнодействующей на оси X, Y:
∑FX = −1,27 Н; ∑FY = −2,7 Н; ∑FZ = 2,12 Н. Модуль равнодействующей:
R = 3,66 Н. Моменты относительно осей X, Y, Z:
∑mX = 13,5 Н·см; ∑mY = − 6,36 Н·см; ∑mZ = −3 Н·см. Главный момент относительно точки О:
∑mO = 15,2 Н·см.
Задача 2.1 (рис. 2.1)
По условию задачи требуется определить скорость и ускорение точки при вращении барабана и опускании груза согласно уравнению x = 2t2 + 4t , м, и разматывании троса. Радиус барабана R = 0,2 м. Скорость и ускорение точки М требуется определить при t1 = 2 с.
Решение
Скорость груза равна скорости точки М барабана:
v |
|
= |
dx |
= |
d |
(2t2 + 4t)= 4t + 4. |
||||||
M |
dt |
dt |
||||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
Угловая скорость барабана |
|
|
|
|||||||||
ω = |
vM |
= |
vM |
= |
4t + 4 |
= 20t + 20 . |
||||||
|
|
|
||||||||||
|
|
CM |
|
R |
0,2 |
|
||||||
Угловое ускорение ε = dω = 20 c−2 . При t1 = 2 c: ω = 60 с-1, dt
vM = 12 м/с; an = ω2R = 602·0,2 = 720 м/с2; aτ = εR = 20·0,2 = 4 м/с2.
Ускорение в точке М:
aM = 
 an2 + a22 =
an2 + a22 = 
 7202 + 42 ≈ 720 м/с2
7202 + 42 ≈ 720 м/с2
Задача 2.2
Угол поворота: φ3 = −31 рад.
Задачи 2.3 (рис. 2.4, а, б, в)
По условию задачи требуется для заданного положения механизма (рис. 2.4, а, б, в) определить: координаты мгновенного центра скоростей шатуна АВ, угловые скорости звеньев, а также линей-
68
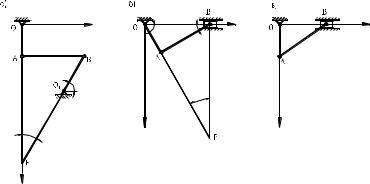
ные скорости и ускорения узловых точек. Угловая скорость кривошипа ОA ω = 4 рад/с, ОA = 0,25 м.
Положение мгновенных центров скоростей показано на рисунке.
|
|
|
° |
0 |
|
|
Y |
6 |
0 |
|
3 |
Y |
Y |
|
° |
|||||
6 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
° |
|
|
|
|
|
|
|
|
|
|
30° |
|
|
|
X |
|
|
|
|
X |
30° |
|
|
|
|
|
|
X
Задача 2.3 (рис. 2.4, а)
Координаты мгновенного центра скоростей шатуна АВ длиной 0,5м (см. рисунок, а):
XP = 1,116 м; YР = 0. Угловая скорость и ускорение шатуна АВ:
ω1 = 1,155 рад/с; ε1 = 19,55 рад/с2. Скорость и ускорение точек А, В:
vА = 1 м/с; аА = 4 м/с2;
vB = 1,155 м/с; аBАn = 0,67 м/с2; аBАτ = 9,78 м/с2; аBn = 5,33 м/с2; аBτ = 2,31 м/с2; аB = 5,81 м/с2.
Задача 2.3 (рис. 2.4, б)
Координаты мгновенного центра скоростей шатуна АВ длиной 0,433 м (см. рисунок, б):
XP = 0,866 м, YР = 0, 5 м. Угловая скорость и ускорение шатуна АВ:
ωAB = 1,33 рад/с; εAB = 8,2 рад/с2. Скорость и ускорение точек А, В:
VА = 1 м/с; аА = 4 м/с2; vВ= 1,155 м/с; аВАn = 0,77 м/с2; аВАτ = 3,55 м/с2; аВ = 0,9 м/с2.
Задача 2.3 (рис. 2.4, в)
Угловая скорость и ускорение шатуна АВ длиной 0,5 м (см. рисунок, в): ω1 = 0; ε1 = 9,2 рад/с2.
Скорость и ускорение точек А, В:
vА = 1,0 м/с; аА = 4 м/с2;
vB = 1,0 м/с; аBАn = 0; аBАτ = 4,6 м/с2; аB = 2,3 м/с2.
Задача 3.1 (рис. 3.1)
Кинетическая энергия системы при скорости груза v: Т = v2(m + J/R2)/ 2.
Работа при подъеме груза на высоту h:
A = МКh/R − mgh. Общее уравнение динамики:
(МК − εJ)δθ − m(g + а)δs = 0; или, так как δθ = δs/R,
(МК − аJ R)/R − m(g + а) = 0,
69