

775
.pdf2. КИНЕМАТИКА
Задания К1У и К2У
1.Привести краткий (примерно на 1–2 стр.) конспект, включающий ответы на следующие вопросы:
− способы задания движения точки; траектория, скорость, ускорение при движении точки; − поступательное и вращательное движения твердого тела; скорости и ускорения точек твердо-
го тела при его поступательном и вращательном движениях; − плоскопараллельное движение; скорости и ускорения точек твердого тела при его плоскопа-
раллельном движении.
2.Решить задачи, приведенные в заданиях.
Краткая теоретическая справка к заданию К1У
В задании К1У рассматривается вращательное движение твердого тела.
Угловая скорость тела в данный момент равна первой производной от угла поворота φ по времени:
ω = lim |
ϕ = |
dϕ |
. |
(2.1) |
|
||||
t→0 |
t dt |
|
||
Угловое ускорение тела характеризует изменение угловой скорости с течением времени:
ω |
|
dω |
|
d 2ϕ |
|
|
ε = lim |
= |
|
= |
|
. |
(2.2) |
|
dt2 |
|||||
t→0 t |
|
dt |
|
|
|
На рис 2.1 показан диск радиусом R, который вращается в плоскости, перпендикулярной оси вращения, проходящей через точку О.
Траектории точек твердого тела при его вращении являются окружностями, а скорости направлены перпендикулярно радиусам и численно равны произведению угловой скорости на расстояние от этой точки до оси вращения. Для точек, лежащих на наружной поверхности диска радиусом R, линейная
скорость равна |
|
v = ωR. |
(2.3) |
Полное ускорение складывается (является геометрической суммой) из нормального аn или центростремительного, направленного к центру вращения, и тангенциального (касательного) аτ, направленного по касательной к траектории. Нормальное и тангенциальное ускорения можно найти из соотношений:
|
|
|
|
|
v2 |
(ωR) |
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
a |
n |
= |
|
|
= |
|
|
|
= ω2R , an v ; |
(2.4) |
|||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
|
R |
R |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
dv |
|
d |
|
dω |
|
|
|
|
||||||||||||
aτ = |
= |
(ωR) = |
R = εR , aτ ОМ. |
(2.5) |
|||||||||||||||||
|
|
|
|||||||||||||||||||
|
dt |
|
|
|
dt |
|
|
dt |
|
||||||||||||
Полное ускорение:
a = an2 + aτ2 = R ω4 + ε2 . |
(2.6) |
Задачи для самоконтроля
Задача 2.1. Механическая система содержит барабан, который может вращаться на неподвижной оси О, и трос с грузом (см. рис. 2.1). Груз А перемещается вниз согласно уравнению
x = 2t2 + 4t (м), приводит посредством троса в движение барабан радиусом R = 0,2 м. Определить скорость и ускорение точки М барабана при t1 = 2 с.
Задача 2.2. Для механической системы, показанной на рис. 2.1, угловая скорость барабана изменяется согласно закону ω = −8t.
Определить угол поворота барабана φ при t = 3 с, если при t = 0 угол поворота φ0 = 5 рад.
Краткая теоретическая справка к заданию К2У
В задании К2У рассматривается плоскопараллельное движение.
Положение и кинематика тела при его плоскопараллельном движении определяется положением и кинематикой каких-либо двух точек, например
30
Рис. 2.1
точек А и В (рис. 2.2), в одном из его плоских сечений, находящихся в плоском движении. Плоскопараллельное движение твердого тела складывается из поступательного движения какой-
либо из его точек (так называемого полюса) и вращательного движения относительно этого полюса:
vB = vA + vBA ,
где vBA — скорость точки В при вращении вокруг полюса А.
Для определения скорости твердого тела необходимо знать скорость одной из его точек (например, точки А), называемой полюсом, и угловую скорость тела ω:
vBA АВ, vBA = ωAB .
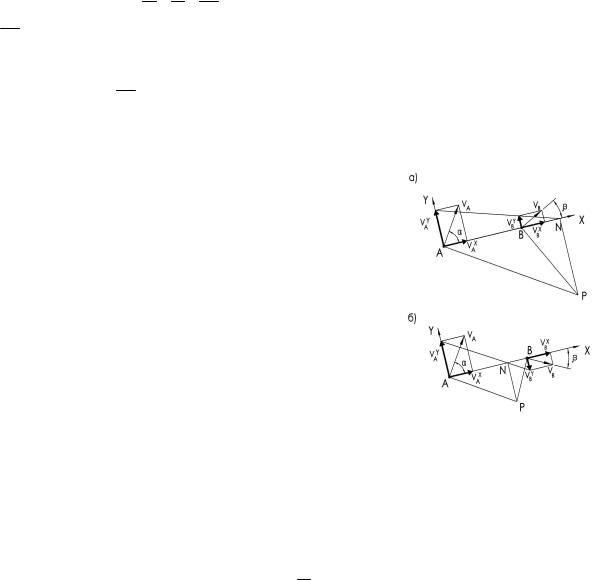
2.1. Определение скоростей точек тела с использованием теоремы о проекциях скоростей, согласно которой проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу.
Рассмотрим две точки А и В движущегося тела (см. рис. 2.2, а, б). Выберем систему координат, причем одна из них — ось X — проходит через точки А, В, а вторая — Y — составляет с ней угол 90°.
Проекции скоростей на ось X:
vAX = vAcosα; vBX = vBcosβ,
где α и β — углы между векторами скоростей vA, vB и осью X. По теореме о проекциях скоростей
vAX = vBX.
Тогда, если известны модуль и направление скорости vA, а
также направление скорости в точке В, то |
|
vB = vA cosα/cosβ. |
(2.7) |
Угловая скорость и угловое ускорение одинаковы для всех то- |
||||||
чек тела. Угловую скорость ω можно найти, если определены |
||||||
проекции скоростей на ось Y, перпендикулярную оси X: |
Рис. 2.2 |
|||||
vAY = vA sinα; vBY = vB sinβ; |
|
|||||
ω = |
|
vAY |
− vBY |
|
. |
(2.8) |
|
|
|||||
|
|
|
|
|||
AB
На прямой, проходящей через точки А, В, есть точка N, скорость которой направлена вдоль этой прямой. Назовем эту точку точкой скольжения. Расстояние от точки А до этой точки согласно (2.8):
АN = vA sinα /ω. |
(2.9) |
Направление определяется поворотом вектора vA по направлению угловой скорости. Модуль скорости в точке N имеет наименьшее значение из всех скоростей точек, лежащих на оси X. Точка N делит отрезок АВ на части, пропорциональные величинам проекций скоростей на ось, перпендикулярную этому отрезку, внешним образом при их одинаковом направлении (см. рис. 2.2, а) и внутренним (см. рис. 2.2, б) образом, если проекции скоростей направлены в разные стороны.
Проекции скорости любой точки (например, точки С), лежащей на оси X:
vСX = vAX = vN;
vСY = ωСN. |
(2.10) |
2.2. Скорости точек твердого тела можно находить с использованием мгновенного центра скоростей (точки сечения, скорость которой в данный момент времени равна нулю).
Положение мгновенного центра скоростей определяется как точка пересечения перпендикуляров к векторам скоростей двух точек тела.
После того, как положение мгновенного центра скоростей (точки Р) найдено, скорость любой точки тела определяется как вращательная скорость вокруг мгновенного центра скоростей:
ω = vA/РА = vB/РВ, |
(2.11) |
где точка Р — мгновенный центр скоростей.
31
Точка скольжения является ближайшей точкой прямой АВ по отношению к мгновенному центру скоростей и лежит на пересечении перпендикуляра, опущенного из мгновенного центра скоростей на прямую АВ.
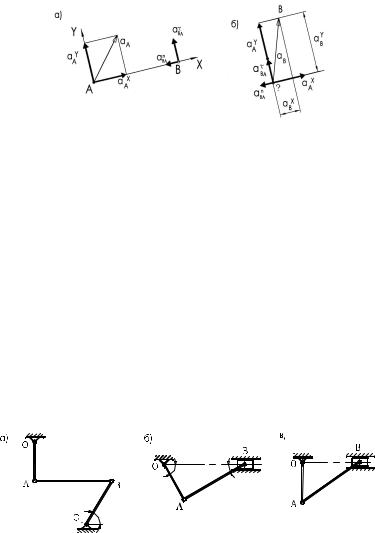
2.3. Определение ускорений точек твердого тела при его плоскопараллельном движении. Ускорение любой точки плоской фигуры при ее плоском движении равно геометрической сумме
ускорений полюса и ускорений точек при вращении фигуры относительно полюса. Вращательное ускорение равно геометрической сумме нормального и касательного ускорений.
Полное ускорение точки В равно векторной сумме ускорения точки А, а также нормального и тангенциального ускорений точки В относительно точки А (рис. 2.3, а):
|
|
|
= |
|
|
+ |
|
n |
+ |
|
τ . |
(2.12) |
a |
B |
a |
A |
a |
a |
|||||||
|
|
|
|
|
BA |
|
|
BA |
|
|||
0
Рис. 2.3.
Вектор нормального ускорения направлен от точки В к точке А, а его модуль:
аВАn = ωАВ2АВ, |
(2.13) |
где ωАВ — угловая скорость тела.
Вектор тангенциального ускорения точки В относительно точки А направлен перпендикулярно к АВ, а его модуль:
аВАτ = εАВАВ, |
(2.14) |
где εАВ — угловое ускорение.
Таким образом, ускорение какой-либо точки твердого тела можно определить, если дано значение ускорения полюса, известны угловая скорость и угловое ускорение тела. В некоторых случаях вместо углового ускорения могут использоваться данные о направлении ускорения в точке В или одной из его составляющих. Проекции ускорений точки В согласно (2.12) приведены на рис. 2.3, б.
Задача для самоконтроля
Задача 2.3. Для заданного положения механизма (рис. 2.4, а, б, в) определить: координаты мгновенного центра скоростей шатуна АВ, угловые скорости звеньев, а также линейные скорости и ускорения узловых точек. Угловая скорость кривошипа ОA ω =
= 4 рад/с, ОA = О1B = 0,25 м, АВ = 0,5 м.
|
|
° |
0 |
|
0 |
|
3 |
6 |
|
° |
|
|
|
|
6 0 °
Рис. 2.4
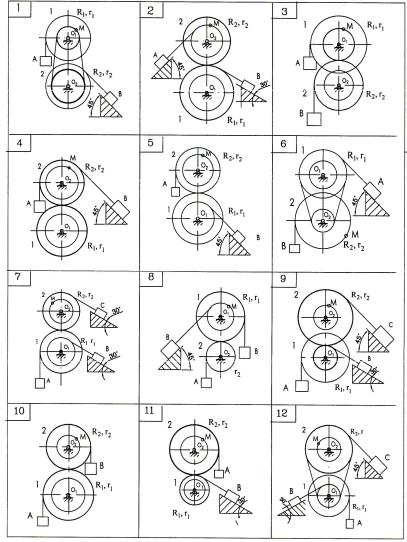
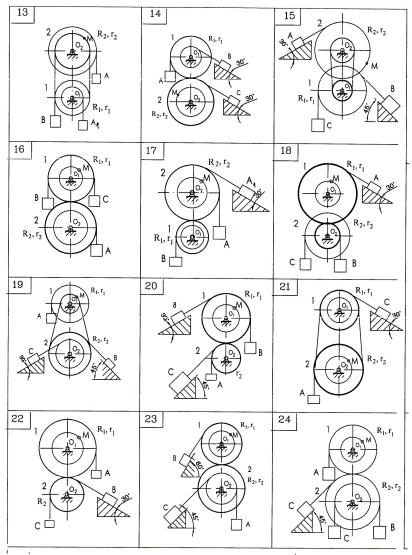
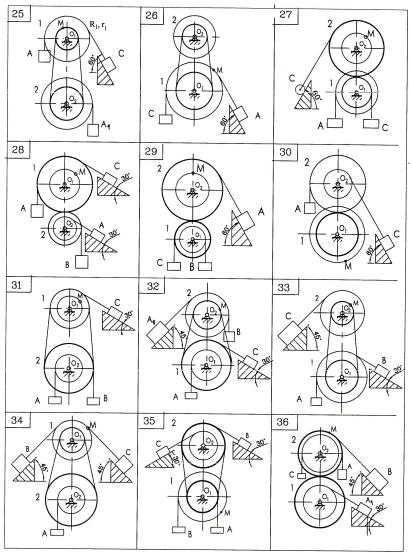
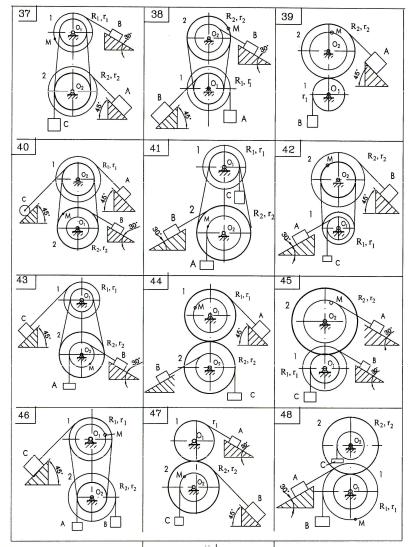
Задание К1У
Вращательное движение твердого тела относительно неподвижных осей
Системы шкивов или шестерен 1, 2 (см. рисунки к вариантам заданий) смонтированы на осях О1, О2 с возможностью совместного вращения. Радиусы шкивов (шестерен) 1 — R1 и r1, а шкивов (шестерен) 2 — R2 и r2. Шкивы связаны нерастяжимыми нитями с грузами А, В, С. Для вариантов 27, 40, 57, 58, 87 один из грузов выполнен в виде сплошного цилиндра радиусом r2, вращающегося вокруг оси. Грузы могут перемещаться вертикально или по наклонным плоскостям.
Системы шкивов 1 и 2 кинематически связаны друг с другом с помощью ременной или зубчатой передачи и начинают вращаться из состояния покоя с постоянным угловым ускорением. Через определенный промежуток времени, равный t1, вал О1, на котором жестко закреплены шкивы или шестерни радиусом R1 и r1, делает n об/мин.
32
Определить, какими были скорость и ускорение точки М, а также грузов А, А1, В и С через 2 с после начала вращения. Исходные данные выбрать по табл. К1.1.
33
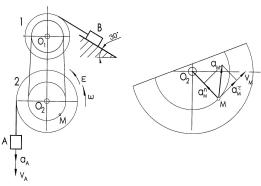
Таблица К1.1
Исходные данные для задания К1У
№ |
n, |
R1, |
r1, |
R2, |
r2, |
t1, |
№ |
n, |
R1, |
r1, |
R2, |
r2, |
t1, |
вар. |
об/мин |
см |
см |
см |
см |
с |
вар. |
об/мин |
см |
см |
см |
см |
с |
1 |
60 |
25 |
20 |
20 |
15 |
4 |
11 |
30 |
30 |
25 |
20 |
15 |
8 |
2 |
120 |
20 |
10 |
25 |
15 |
4 |
12 |
90 |
40 |
35 |
35 |
39 |
10 |
3 |
30 |
35 |
25 |
30 |
20 |
5 |
13 |
180 |
25 |
15 |
40 |
30 |
12 |
4 |
90 |
30 |
25 |
35 |
25 |
2 |
14 |
60 |
15 |
10 |
25 |
20 |
10 |
5 |
180 |
45 |
20 |
30 |
20 |
8 |
15 |
120 |
25 |
20 |
25 |
15 |
12 |
6 |
60 |
25 |
15 |
35 |
20 |
10 |
16 |
30 |
30 |
15 |
30 |
25 |
16 |
7 |
120 |
20 |
15 |
30 |
20 |
8 |
17 |
90 |
40 |
30 |
30 |
25 |
3 |
8 |
30 |
35 |
25 |
25 |
15 |
4 |
18 |
120 |
25 |
20 |
20 |
15 |
4 |
9 |
90 |
35 |
30 |
25 |
20 |
4 |
19 |
30 |
20 |
10 |
25 |
15 |
8 |
10 |
180 |
40 |
25 |
20 |
15 |
5 |
20 |
90 |
35 |
30 |
30 |
25 |
10 |
Пример
Груз А (рис. 2.5) подвешен на нити, намотанной на ступень шкива радиусом R2. В определенный момент времени груз А начинает перемещаться с постоянным ускорением и через t1 = 6 с достигает скорости 18 м/с. С началом движения груза начинают вращаться шкивы 2 и связанные с ними ременной передачей шкивы, смонтированные на валу 1.
Радиусы шкивов: R1 = 50 см, r1 = 20 см, r2 = 40 см, R2 = 60 см. Определить, какими были скорость и ускорение точки М, а также грузов А и В через 2 с после начала вращения.
Решение
1. Определим ускорение груза А при его равноускоренном движении и при начальной скорости vА0 = 0:
аА = vА1/t1 = 18/6 = 3 м/с2.
2. Угловые ускорения шкивов, смонтированных на |
|
валах 1, 2: |
|
ε2 = аА/R2 = 3/0,6 = 5 с-2; |
Рис. 2.5 |
ε1 = ε2 r2/r1 = 5·40/20 = 10 с-2. |
|
3. Угловые скорости шкивов через t2 = 2 с после начала движения при условии, что начальная угловая скорость равна нулю:
ω2 = ε2 t2 = 10 с-1; ω1 = ε1t2 = 20 с-1.
Число оборотов при этом составит:
n2 = 60·10/2π = 95,5 об/мин.; n1 = 191 об/мин;
4. Скорости грузов А и В через 2с после начала движения при условии, что их начальная скорость была равна нулю:
vА = аАt2 = 6 м/с; vВ = ω1R1 = 10 м/с.
Направления скоростей показаны на рис. 2.5.
5. Ускорение груза В:
аВ = ε1 R1 = 5 м/с2.
Направление ускорения совпадает с направлением скорости. 6. Скорость точки М:
vМ = ω2r2 = 4 м/с.
Скорость направлена по касательной к радиусу в направлении вращения. 7. Ускорение точки М:
– нормальная составляющая ускорения аМn = ω22r2 = 40 м/с2
инаправлена по радиусу к оси вращения;
–тангенциальная составляющая
34

аМτ = ε2 r2 = 2 м/с2;
– полное ускорение
аМ = 
 (aMn )2 + (aMτ )2 = 40,05 м/с2.
(aMn )2 + (aMτ )2 = 40,05 м/с2.
Ответ: n1 = 191 об/мин; n2 = 95,5 об/мин; vА = 6 м/с; vВ = 10 м/с; аА = 3 м/с; аВ = 5 м/с2; vМ = 4 м/с; аМ = 40,05 м/с2.
35
36
37
38
39