

Материалы к дистанционному курсу «Бортовые передачи и механизмы поворота ГМ»
Механизмы поворота гусеничных машин
1
Требования к механизмам поворота ГМ
-Обеспечение хорошей управляемости
-Высокая экономичность механизма поворота
-Устойчивость прямолинейного движения
-Легкость и простота управления
-Компактность и надёжность
2

Б
е
з
р
е
IIк
II
Iту
т
тпи
и
еип
п
рп
а
ц
и
и
Классификация механизмов поворота ГМ
0= |
1+ 2 |
= пр |
2= пр |
1< 2 < пр |
|
2 |
|
|
|
3

Механизм поворота – простой дифференциал
Уравнение кинематики Момент в тормозе при повороте
+
Возможность поворотаB/2с . любыми радиусами до . Конструктивная простота. Два элемента управления
-Неустойчивое прямолинейное. движение. Большие усилия в тормозах Большие .потери мощности при
повороте . Низкая тяга на забегающей. гусенице Нет рекуперации

Механизм поворота – двойной дифференциал
+
Возможность поворота с любыми . радиусами до второго расчётного Рекуперация мощности при движении. на втором расчётном радиусе .
Два элемента управления
-Неустойчивое прямолинейное движение. . Низкая тяга на забегающей гусенице Невозможность движения с радиусами. меньшими второго расчётного
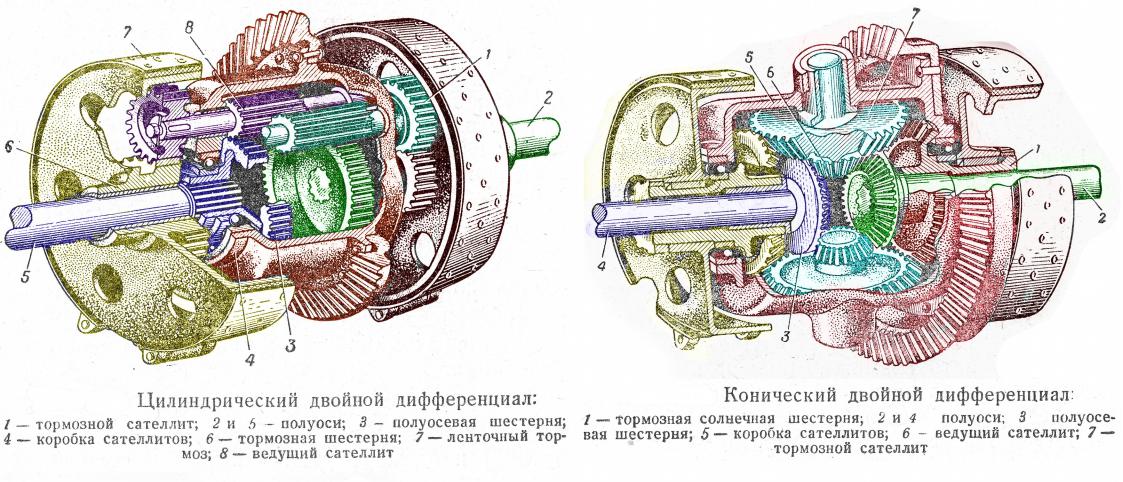
Механизм поворота – двойной дифференциал
6
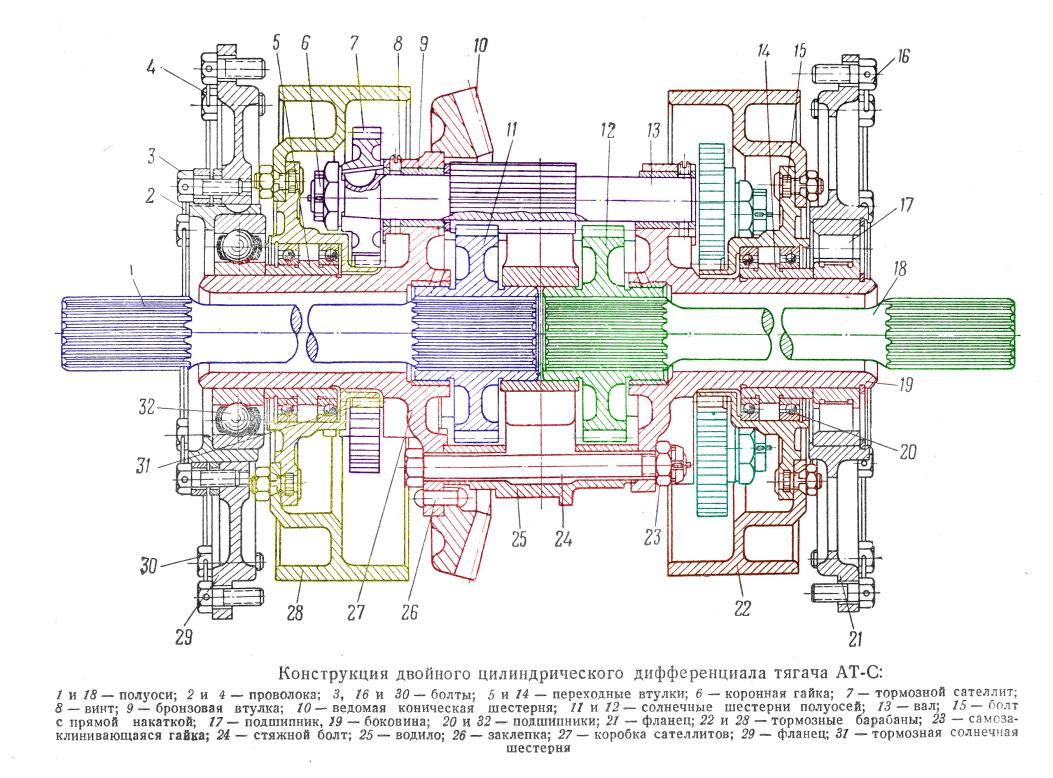
Конструкция механизма поворота тягача АТС
7

Червячный конический двойной дифференциал с автоблокировкой
8
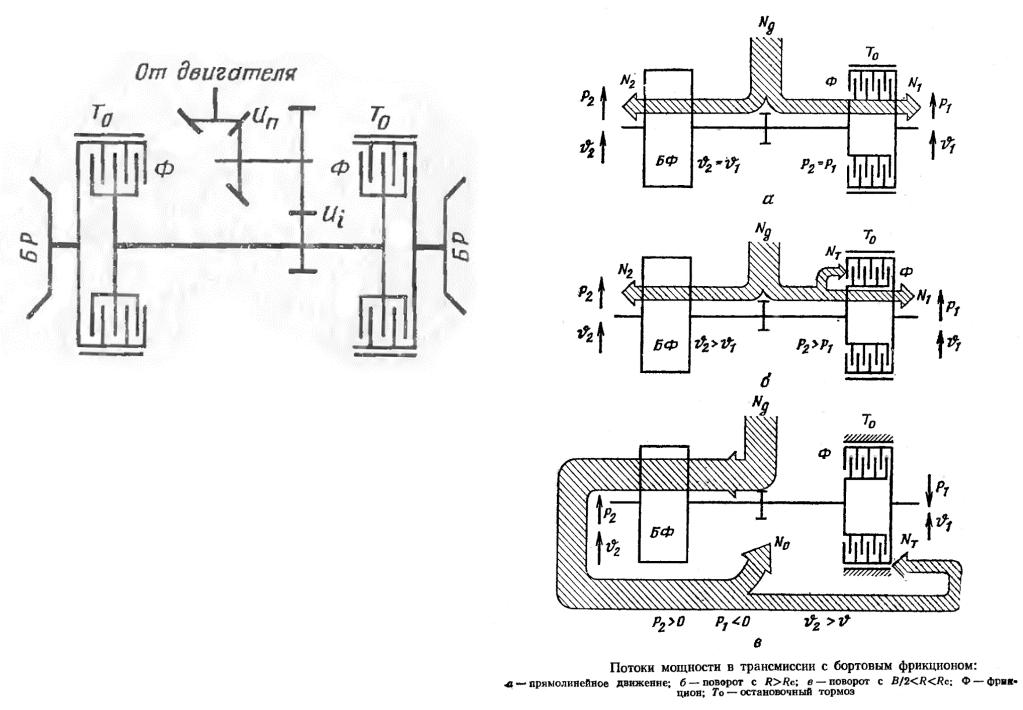
Механизм поворота – бортовой фрикцион
+ |
|
|
|
|
Простота и компактность |
движение |
|
||
Устойчивое прямолинейное. |
. |
|||
Поворот с любыми радиусами до |
|
|||
Реализация всей мощности ГМ через |
один борт. |
|||
|
B/2. |
|
||
-
Большая нагрузка на тормоз отстающей гусеницы. Низкая экономичность в большинстве режимов поворота. Неустойчивые радиусы поворота больше B/2
9
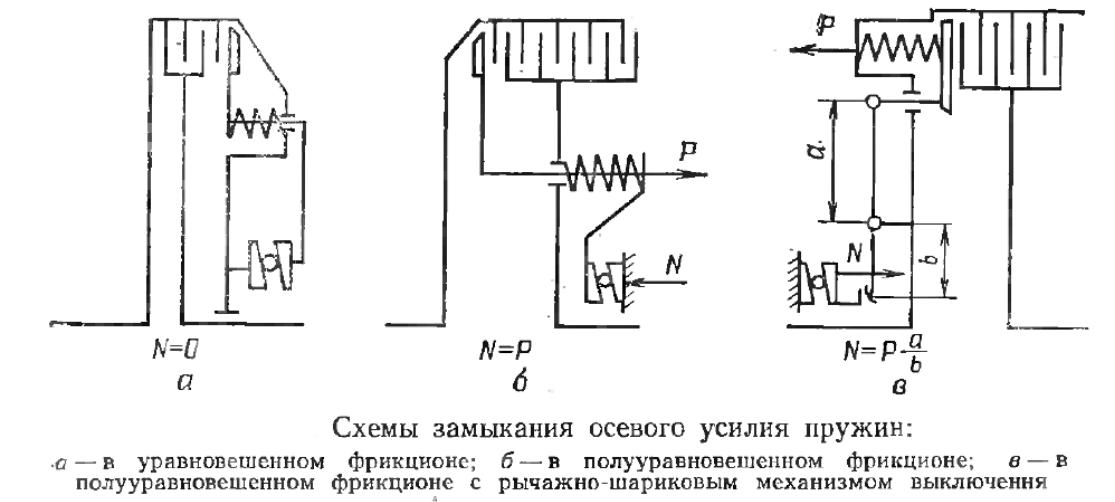
Типы фрикционных устройств
10