

MetKul2006-5.04.06
.pdfдиаграммы основного направления. Этим достигается уменьшение угла давления на фазе удаления основного направления движения.
Рис.10
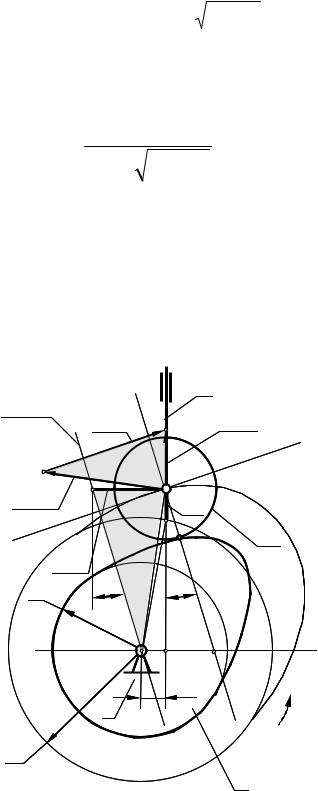
При проектировании кулачкового механизма с коромыслом диаграммы
SB = f (VqB ) строятся в криволинейных системах координат (Рис.10). Так
как точка B коромысла движется по дуге окружности радиуса равного дли-
не коромысла l2 , то ее линейное перемещение ySB откладывается по этой дуге, а абсцисса первой передаточной функцииxVqB откладывается по радиу-
су коромысла. При силовом замыкании высшей пары абсциссы передаточных функций для обеих диаграмм положительны. Зона для выбора центра вращения кулачка, как и в предыдущем примере, определяется пересечением лучей aa и bb, проведенных касательно к диаграммам под углом давления
21
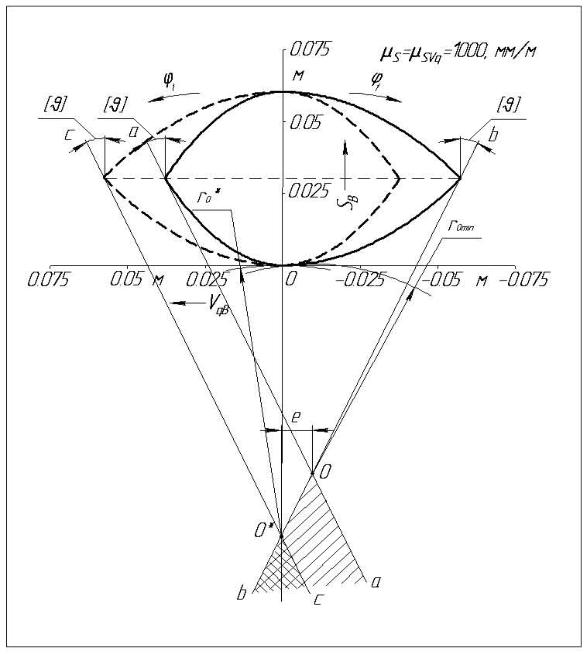
Рис.11
[ϑ] к направлению перемещения точки B. Минимальный радиус r0 min оп-
ределяется вершиной этой зоны точкой Or min . Расстояние между точками
Or min и C определяет межосевое расстояние механизма aw . Если при про-
ектировании межосевое расстояние задано, то выбор радиуса r0*определяет-
ся точкой пересечения дуги радиуса aw с зоной разрешенных положений центра вращения кулачка.
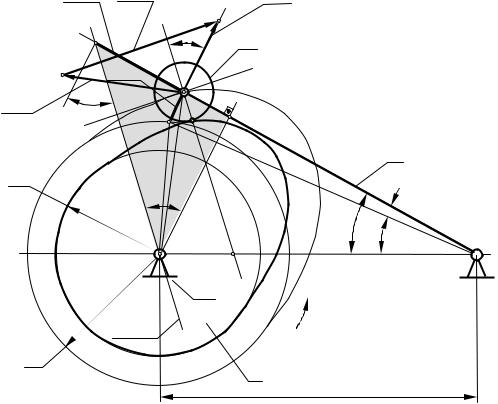
В механизмах с геометрическим замыканием движение выходного звена на фазах удаления и сближения обеспечивается силовым воздействием
22
кулачка на толкатель. Так на фазе сближения направление движения толкателя отрицательно, а, следовательно, отрицательна и первая передаточная функция. Диаграмма SB = f (VqB ) для механизма с геометрическим замы-
канием приведена на рис. 11. Необходимо отметить, что при одинаковых законах движения центровые профили кулачков с силовым и с геометрическим замыканием одинаковы. Определение размеров механизма с геометрическим замыканием и реверсивным движением кулачка требует построения двух диаграмм SB = f (VqB ). На рис. 11 вторая диаграмма изображена пункти-
ром. В этом примере искомая зона определяется пересечением лучей bb и сс,
а минимальный радиус соответствует центральному механизму и определя-
ется положением точки O* . Так как нагрузка на толкатель на фазе удаления обычно меньше, то толкатель можно перемещать с большей скоростью. В
этом случае диаграмма SB = f (VqB ) относительно оси ординат не симмет-
рична, так как значения передаточной функции на фазе сближения больше чем на фазе удаления. К сожалению, невозможно рассмотреть в рамках учебного пособия все возможные случаи определения размеров кулачка, даже при определении их по допустимому углу давления. При рабочей поверхности толкателя, выполненной в виде плоскости, сферы или цилиндра (при отсутствии ролика) выбор размеров осуществляется по контактной прочности или по условию равномерного износа контактных поверхностей.
После определения радиуса начальной шайбы кулачка переходят к определению радиуса ролика или радиуса рабочей поверхности толкателя. При выборе радиуса ролика rp руководствуются следующими аргументами:
• Ролик является простой деталью с несложной технологией изготовления. Обычно она включает вытачивание ролика на токарном станке, термообработку и окончательное шлифование. Кулачок имеет сложную рабочую поверхность и его изготовление требует либо специальных приспо-
23
соблений, либо применения станков с ЧПУ при точении и шлифовании. Для того чтобы снизить массу толкателя и динамические нагрузки в механизме, необходимо уменьшать радиус ролика. Поэтому, обычно, ролик выполняют с радиусом в 3-5 раз меньшим радиуса начальной шайбы кулачка. Так как при этом частота вращения ролика в такое же количество раз превышает частоту вращения кулачка, то для обеспечения равной прочности и износостойкости ролик выполняют из более качественного материала и термообрабатывают до большей твердости. На практике максимальный радиус ролика ограничи-
вают условием rр < 0.4 r0 .
|
Конструктивный |
Срезанная часть |
|
|
конструктивного |
|
|
а |
профиль |
профиля |
б |
ρmin |
|
||
rp |
|
|
|
|
|
|
Центровой
профиль
rp
Рис.12
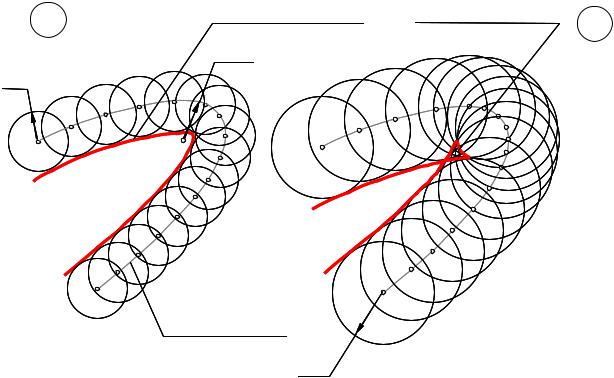
• Конструктивный профиль кулачка не должен быть заостренным или срезанным. Если радиус ролика rр больше ρmin - минимального радиуса кри-
визны теоретического профиля кулачка, то приходит срезание конструктив-
ного профиля кулачка минимального радиуса (см. рис. 11б). Если rр близок
24
по к ρmin (значение лежит в пределах 0.7 ρmin < rр < ρmin) , то конструктив-
ный профиль кулачка в зоне ρmin будет заостренным (см. рис. 11а). Поэтому на выбор радиуса ролика накладывается ограничение rр < 0.7 ρmin.
• Рекомендуется выбирать радиус ролика из стандартного ряда диаметров в диапазоне rp = (0.2 … 0.35) r0. При этом необходимо учитывать,
что увеличение радиуса ролика увеличивает габариты и массу толкателя, ухудшает динамические характеристики механизма (уменьшает его собственную частоту). Уменьшение радиуса ролика увеличивает габариты кулачка и его массу; частота вращения ролика увеличивается, его долговечность снижается.
При выборе радиуса сферы рабочего участка толкателя подход к решению задачи несколько иной.
• Так как в этом случае нет местной подвижности, заменяющей скольжение качением, то на толкателе имеется очень небольшой рабочий участок, точки которого скользят относительно рабочей поверхности кулачка, то есть износ поверхности толкателя более интенсивный. Увеличение радиуса сферы не увеличивает габаритов и массы толкателя, а размеры конструктивного профиля кулачка при этом уменьшаются. Поэтому этот радиус можно выбирать достаточно большим. Часто применяются толкатели с плоской рабочей поверхностью кулачка (радиус сферы равен бесконечности). В этом случае угол давления в высшей паре при поступательном движении толкателя есть величина постоянная и равная углу между нормалью к плоскости толкателя и вектором скорости его движения на фазе удаления. Определение размеров по углу давления при этом невозможно. Радиус кулачка при этом определяют по контактным напряжениям, а форму профиля проверяют по условию выпуклости [1].
25
1 |
|
Центровой профиль |
|||
r |
|
|
Конструктивный профиль |
||
|
|
B0 |
|
|
|
φ1 |
|
|
|
φ1i |
|
0 |
e |
|
|
||
|
|
|
|||
-φ1 |
O |
1 |
|
|
SBi 3 |
|
|
|
|
n |
|
r0 |
|
n |
|
|
|
|
Ki |
Bi |
|
||
|
φраб |
rp |
|||
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
2 |
Рис.13
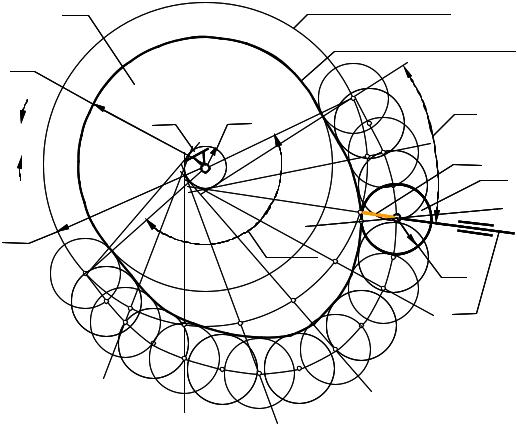
4. Построение центрового и конструктивного профилей кулачка 4.1. Для кулачкового механизма с внеосным толкателем
Построение профилей кулачка проводится в следующей последовательности (Рис.13):
• выбирается масштаб построения µl , мм/м;
• из произвольного центра проводятся в масштабе окружности с радиусами r0 и е;
• из произвольной точки на окружности ro в направлении -ϕ1 от-
кладывается рабочий угол ϕраб, угол ϕраб делится на n интервалов;
26
• из каждой точки деления касательно к окружности радиусом е
проводятся прямые (направление перемещения толкателя в данном положении механизма);
• на этих прямых от точки пересечения с окружностью r0 отклады-
ваются в масштабе µl соответствующие перемещения толкателя SВi;
•полученные точки соединяются плавной кривой, образуя центровой профиль кулачка;
•проводятся из произвольных точек выбранных равномерно по центровому профилю кулачка дуги окружностей радиуса rр ;
•конструктивный профиль кулачка получаем как огибающую к множеству положений ролика толкателя.
|
Конструктивный профиль |
||
|
|
1 |
|
|
r |
|
|
|
φ1 |
aw |
0 |
Cn |
-φ1 |
|
O |
|
|
|
1 |
r0 Bn φраб
φраб
Центровой профиль
B0
φ1i
SBi |
3 |
n |
Bi |
n |
|
Ki |
|
|
C0 |
|
|
r |
|
|
p |
|
 Δφ2i
Δφ2i
 Ci 2
Ci 2
Рис.14
27

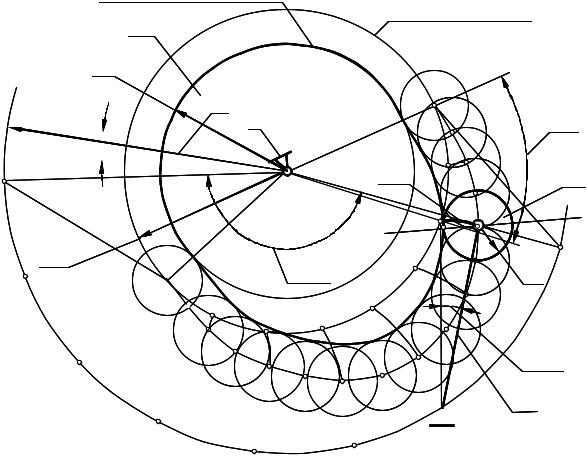
4.2. Для кулачкового механизма с коромыслом Построение профилей кулачка проводится в следующей последова-
тельности:
•выбирается масштаб построения µl , мм/м,
•из произвольного центра проводятся в масштабе окружности с радиусами r0 и aw,
•из произвольной точки на окружности aw в направлении -ϕ1 откла-
дывается рабочий угол, угол делится на n интервалов, из каждой точки де-
ления радиусом lBC проводятся дуги,
•на этих дугах от точки пересечения с окружностью r0 откладываются
вмасштабе µl соответствующие перемещения толкателя SBi,
•полученные точки соединяются плавной кривой, образуя центровой профиль кулачка,
•проводятся из произвольных точек выбранных равномерно по цен-
тровому профилю кулачка дуги окружностей радиуса rр ,
• конструктивный профиль кулачка получаем как огибающую к множеству положений ролика толкателя.
5. Проверка результатов синтеза по диаграмме углов давления 5.1. Угол давления в высшей паре для кулачкового механизма с толка-
телем
Рассмотрим плоский кулачковый механизм с поступательно движу-
щимся роликовым толкателем (Рис. 15). Из ∆ BPF
tgϑ = lFP ,
lBF
где lFP = lDK − e =VωB2 − e,
1
28
Из B0O1F : |
lBF = SBi +lBoF = SBi + r02 −e2 . |
Подставляя эти выражения в формулу для тангенса угла давления, получим
|
|
VB2 |
±e |
|
|
|
|
ω |
|
|
|
tgϑ= S |
|
1 |
|
|
, |
Bi |
+ r2 |
−e2 |
|||
|
|
0 |
|
|
|
где знак - соответствует смещению оси толкателя (эксцентриситету) вправо от центра вращения кулачка.
Õn-n |
V |
n |
|
2 |
VB 2 |
|
|
|
b2 |
||||
|
|
B2B1 |
|
|||
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
b1 |
|
|
|
B |
|
|
VB 1 D |
|
|
B0 |
SB i |
|
|
|
|
|
|
3 |
|
t |
VqB 2 |
|
|
|
K |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
r |
|
ϑ |
|
ϑ |
|
|
|
|
|
|
||
|
|
|
О1 |
|
F P |
|
|
|
|
0 |
|
e |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
ro |
|
|
|
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Рис.15
29
5.2. Угол давления в высшей паре для кулачкового механизма с коромыслом
Рассмотрим плоский кулачковый механизм с коромысловым (качающимся) движущимся роликовым толкателем (Рис. 16).
Из ∆DQO |
|
tg ϑ=lDQ / lOD , |
где |
lDQ = lBC + lBD – lCQ, |
|
|
|
lOQ = aw·sinφ2 , φ2= φ20 + ∆φ2 . |
Из ∆OB0C |
|
φ20=arcсos [(r02-l22-aw2)/(-2·l2·aw)], |
а из сектора BB0C |
∆φ2 = SBi / l2. |
|
Подставляя эти выражения в формулу для тангенса угла давления, получим
tg ϑ= (l2 +VB/ ω1 -aw·cosφ2)/ (aw·sinφ2).
|
VqB 2 VB2B1 |
n |
b |
VB 2 |
|
|
|
|
|
|
|
|
|
||
b |
|
D |
ϑ |
2 3 |
t |
|
|
|
SB i |
B |
|
|
|
||
VB 1 1 |
|
ϑ |
|
|
|
|
|
|
|
Q |
|
|
|
||
|
t |
B0 |
|
|
|
|
|
|
K |
|
|
|
|
||
|
|
|
|
2 |
|
||
|
|
|
|
|
|
||
r |
|
|
|
|
|
|
|
|
|
ϑ |
|
|
∆φ2 |
|
|
|
|
|
|
φ |
|
||
|
|
|
О |
P |
φ20 |
С |
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
0n
|
//n-n |
ro |
ω1 |
1
aw
Рис.16
30