

3863
.pdfРис. 7.1. Общий вид баровой машины на базе трактора Т-130
Рис. 7.2. Принципиальная схема баровой землеройной машины
Баровый рабочий орган состоит из рамы и бесконечной цепи со смен- ными резцами. Цепь опирается на часто установленные направляющие ро- лики, не дающие ей свободно провисать и позволяющие получить достаточное напорное усилие. Одним комплектом резцов можно нарезать щели длиной
41

800…1000 м. Быстрый выход из строя резцов и баровой цепи – один из важ- нейших эксплуатационных недостатков баровых машин.
Принцип работы баровой машины подобен принципу работы цепного траншейного экскаватора. При движении цепи рабочий орган опускается на грунт и постепенно врезается до необходимой глубины. Разрушенный грунт выносится на поверхность цепью. В результате сочетания перемещения ма- шины и движения цепи зубья срезают стружку и прорезают щель.
К основным конструктивным параметрам баровых машин относят длину рабочего органа, ширину щели, скорости движения баровой цепи и перемеще- ния машины, число одновременно прорезаемых щелей, максимальное тяговое усилие, усилие подъема (перевода в транспортное положение) и опускания (прижатия к забою) рабочего органа.
Фрезерные машины (рис. 7.3) создают на базе гусеничных тракторов или роторных траншейных экскаваторов. Их конструктивная схема, как и принцип работы, аналогичны роторным экскаваторам.
Рис. 7.3. Схема фрезерной машины:
1 – гусеничный тягач; 2 – кронштейн; 3 – гидроцилиндр подъема; 4 – фрезерный рабочий орган
42

Основным отличием является небольшая ширина отрываемой щели и не- большая по сравнению с диаметром фрезы глубина щели, которая ограничена условиями выноса разрушенного грунта на поверхность.
На эффективность баровых и фрезерных рабочих органов влияют скоро- сти резания и подачи, геометрия зубьев и их рациональная расстановка. Резцы нужно устанавливать так, чтобы предыдущие обеспечивали последующим ра- боту в условиях полублокированного или свободного резания.
Мерзлый грунт легко разрушается растягивающими усилиями. Поэтому
наиболее выгодным с энергетической точки зрения представляется разрушение мерзлых грунтов отрывом. Машины с винтовым рабочим органом, основан-
ные на таком принципе разрушения, прикладывают к грунту нагрузку, направ- ленную в сторону открытой поверхности. Исследования и производственные испытания показали, что способ разрушения мерзлого грунта растяжением дос- таточно эффективен.
Рабочие органы, разрушающие мерзлый грунт растягивающими усилия- ми, работают по двум схемам: с завинчивающимся анкером и с внедрением клина на границе замерзания. В первом случае (рис. 7.4, а) в грунт завинчивают крутящим моментом МКР до определенной глубины h анкерное устройство диаметром D. Затем усилием РПОД, направленным вдоль анкера, от поверхности отрывают конусообразные глыбы грунта диаметром D1 и высотой h0, которые одновременно разрыхляются. Усилие может быть как статическим, так и дина- мическим. При наличии открытого забоя анкер (рис. 7.4, б) заглубляет клин, вдавливаемый усилием, развиваемым винтовым наконечником крутящим мо- ментом МКР, до скола грунта в сторону открытой поверхности.
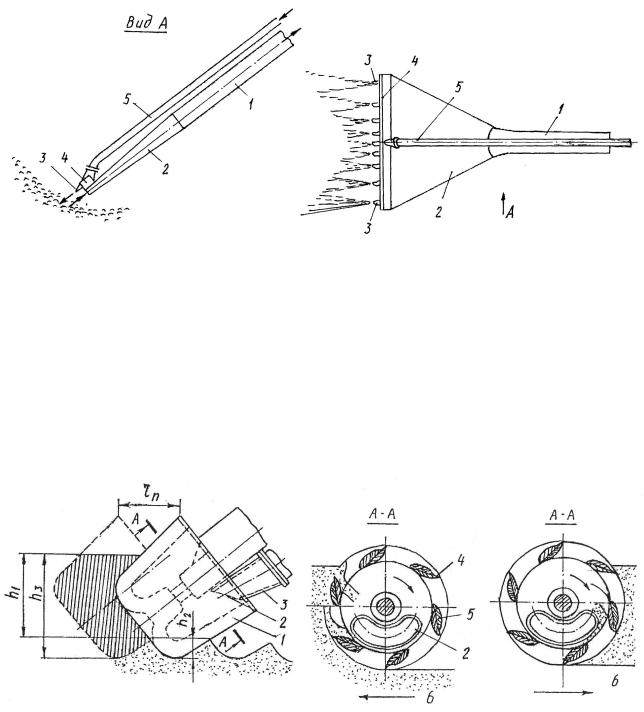
Рис. 7.4. Винтовой рабочий орган:
1 – штанга; 2 – упорный подшипник; 3 – клин; 4 – винтовой наконечник
43

Для внедрения клина в грунт на границе замерзания необходимо предвари- тельно подготовить забой в виде уступа, из которого начинает работать машина. Обычно такой рабочий орган (рис. 7.5) устанавливают на трактор вместо отвала бульдозера. В этом случае клин заглубляется тяговым усилием трактора, а скол грунта происходит при подъеме клина гидроцилиндром. Усилие Рпод на подъем клина рассчитывают исходя из прочности грунта на разрыв σр, глубины промер- зания h и угла скола грунта ψ. При этом прочность грунта σр нужно принимать равной прочности промерзшего слоя при средней температуре Тср.
Рис. 7.5. Разрушение грунта клином, внедряемым на границе замерзания: h – глубина промерзания; 1 – тягач; 2 – рама; 3 – гидроцилиндр; 4 – клин
Перспективность применения таких машин очевидна, т.к. они воздейст- вуют на мерзлый грунт, начиная от границы промерзания, где он наименее про- чен по сравнению с более прочным поверхностным слоем.
Мерзлый грунт может разрушаться при соударении рабочего органа ма- шины с грунтом (рис. 7.6), если кинетическая энергия его в значительной степе- ни преобразуется в энергию деформации грунта. От места соударения в грунте распространяется волна, вызывающая в конечном счете разрушение грунта. Ос- новная причина разрушения – появление наряду со сжатием под рабочим орга- ном растяжения контактной поверхности в прилегающем районе. В результате в мерзлом грунте появляются трещины, опережающие начало скалывания. При за- бивании в грунт клина появляется, кроме того, расклинивающее усилие. При на- личии свободной поверхности, в направлении которой происходит скол, это вы- зывает разрушение грунта, в основном, растяжением.
Способы вибрационного и виброударного разрушения мерзлых грунтов отличаются от способа ударного разрушения сравнительно большой частотой силовых импульсов при меньшей их энергии. Обычно механизмы, вызывающие колебания рабочего органа, обеспечивают частоту 8…120 Гц при энергии одно- го импульса от 0,1 до 30 кДж. Рабочие органы землеройных машин, у которых инструмент движется не только вместе с рабочим органом, но и относительно
44

него, называют активными. Активизация рабочих органов позволяет подводить к забою дополнительную энергию, увеличивающую производительность и эф- фективность рабочего процесса.
Рис. 7.6. Конструктивные схемы клиновых рыхлителей:
а– с падающим рабочим органом; б – с забиваемым рабочим органом;
в– для послойного рыхления грунта
Взависимости от схемы крепления вибратора на рабочем органе разли- чают три типа таких машин (рис. 7.7): вибрационные, виброударные и часто- ударные.
Вибрационный рабочий орган (рис. 7.7, а) состоит из вибратора, который жестко закреплен на рабочем инструменте. Под действием синусоидальной вы- нуждающей силы рабочий орган совершает колебания, передающиеся ин- струментом грунту. Более эффективны вибраторы направленного действия, ко- торые обычно применяют для активизации рабочих органов землеройных ма- шин.
Виброударный рабочий орган (вибромолот) производит как вибрацион- ное, так и ударное воздействие на грунт. Он состоит из вибратора (см. рис. 7.7, б) и рабочего инструмента, соединенных пружинами. При движении вибратора под действием вынуждающей силы пружины вначале запасают энергию, а за- тем отдают ее инструменту, увеличивая силу соударения бойка и наковальни. Режим работы вибромолота зависит от регулировки механизма. Число ударов может быть равным частоте колебаний вибратора или быть меньше ее. Это число в значительной степени зависит от зазора х между бойком и наковальней, который может быть положительным, нулевым или отрицательным (боек при- жимается к наковальне с определенной силой).
45

Рис. 7.7. Схемы рабочих органов вибромашин:
а – вибрационного действия; б – виброударного действия; в – частоударного действия; 1 – вибратор; 2 – боёк; 3 – наковальня; 4 – рабочий инструмент; 5, 6 – пружины
Когда вибратор и рабочий инструмент (см. рис. 7.7, в) не соединены, на грунт передаются частоударные нагрузки. По данным исследований, такие ра- бочие органы несколько менее эффективны, чем виброударные.
7.3.ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
7.3.1.Используя лабораторный практикум, плакаты и кинофильм, изу- чить общее устройство и назначение машин для разработки мёрзлых грунтов.
7.3.2.Определить основные параметры и производительность машины для разработки мёрзлых грунтов по исходным данным (табл. П.5), используя выражение (7.1).
Техническая производительность роторных экскаваторов с резцами для разработки мёрзлых грунтов:
ПТ = bТ·hТ·υР, |
(7.1) |
где bТ – ширина траншеи, м; hТ – глубина траншеи (максимальная, по техниче- ской характеристике), м; υР – рабочая скорость перемещения экскаватора, м/ч.
46
7.4. ФОРМА ОТЧЁТА
7.4.1.Цель работы.
7.4.2.Описание назначения, устройства и классификации машин и обору- дования для разработки мёрзлых грунтов.
7.4.3.Определение основных параметров и производительности по формуле (7.1).
7.4.4.Формулирование кратких выводов по лабораторной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Назовите, какими способами можно разрабатывать мёрзлые грунты.
2.Поясните назначение и принцип работы баровой и фрезерной машин.
3.Объясните вибрационный способ разрушения мёрзлых грунтов и на- рисуйте конструктивные схемы вибромашин.
4.В чём отличие виброударных от частоударных машин?
5.Напишите уравнение технической производительности роторных экс- каваторов с резцами.
ЛАБОРАТОРНАЯ РАБОТА №8 ИЗУЧЕНИЕ РАБОЧЕГО ПРОЦЕССА И КОНСТРУКЦИИ
МАШИН И ОБОРУДОВАНИЯ ДЛЯ ГИДРОМЕХАНИЧЕСКОЙ РАЗРАБОТКИ ГРУНТОВ
8.1. ЦЕЛЬ РАБОТЫ
Цель работы заключается в изучении рабочего процесса, конструкции и определении производительности машин и оборудования для гидромеханиче- ской разработки грунтов.
8.2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Гидромеханизация – особый вид механизации работ для разработки грун- тов, при котором все операции процесса (разработка, транспортировка и уклад- ка грунта) или некоторые из них выполняют с помощью воды. При этом от за- боя к месту укладки подаётся смесь грунта и воды, называемая пульпой. Этот непрерывный процесс обеспечивает комплексную механизацию работ при раз- работке грунтов.
Преимущества гидромеханизации земляных работ состоят в высокой производительности оборудования и труда с подачей грунта на большие рас- стояния, возможности разработки грунта из-под воды, естественного уплотне-
47

ния укладываемого намывом грунта и в возможности разделения его на фрак- ции. Необходимо, однако, учитывать, что производительность и стоимость гид- ромеханизированных земляных работ в значительной мере зависят от местных условий. Данный способ применим не для всех групп грунта. Плохо поддаются такой разработке грунты, содержащие большое количество камней, а также плотные глинистые.
Различают два способа гидромеханизации земляных работ – закрытый (подводный) и открытый. При закрытом способе применяют плавучие землесо- сные установки, снабженные всасывающей трубой, которую опускают на дно водоёма. Водяным потоком, всасываемым землесосом, захватывают со дна грунтовые частицы и образовавшуюся пульпу перекачивают по трубам к месту отвала, где частицы оседают, а вода уходит.
С учётом этих двух способов оборудование для механизации работ тоже подразделяют на две группы: для землесосных и для гидромониторных работ.
Особую группу составляет вспомогательное оборудование.
В первую группу входят землесосные снаряды (автономные и с питанием от береговых энергетических систем), во вторую – гидромониторы, насосные и землесосные установки. Водоводы и пульпопроводы, а также перекачивающие землесосные установки включают в обе группы.
Трудоёмкость работ и удельный расход электроэнергии при гидромони-
торном способе более высокие, чем при землесосном.
Землесосный снаряд (рис. 8.1) представляет собой землеройную машину непрерывного действия, предназначенную для разработки грунта в подводном забое и перемещения его к месту укладки. Это плавучий агрегат, оборудованный рядом специальных устройств (рис. 8.2).
Рис. 8.1. Общий вид землесосного снаряда
К ним относятся грунтозаборное устройство, предназначенное для непре- рывного отделения грунта от массива забоя, грунтовый насос, всасывающий и
48

перекачивающий пульпу, всасывающий пульпопровод – трубопровод, соеди- няющий грунтозаборное устройство с грунтовым насосом, напорный пульпо- провод, предназначенный для соединения грунтового насоса с береговыми пуль- попроводами.
Землесосный снаряд имеет также устройство для рабочих перемещений, обеспечивающее непрерывный контакт грунтозаборного устройства с разраба- тываемым грунтом (оперативные лебедки и свайное оборудование). Силовые установки снаряда используют для приведения в действие грунтового насоса (главная машина), дизель-электрические установки – для приведения в дейст- вие механизмов рабочих перемещений, для освещения, водоснабжения и быто- вых нужд.
Грунтозаборные устройства могут быть двух типов: для непосредственно- го всасывания без предварительного разрыхления грунта и с каким-либо рыхли- телем, повышающим интенсивность грунтозабора. Основной частью этого уст- ройства является наконечник, в зев которого при работе грунтового насоса по- ступает вода. Скорость движения воды возрастает с приближением к зеву нако- нечника, достигая в его плоскости 1,5…2 м/с. Струи воды, попадающие на грунт, размывают его и увлекают во всасывающее отверстие; в грунте образуются фильтрационные потоки, увлекающие частицы грунта.
Рис. 8.2. Схема землесосного снаряда:
1 – грунтозаборное устройство; 2 – лебедка; 3 – напорный пульпопровод; 4 – свайное устройство; 5 – плавучий пульпопровод; 6 – грунтовой насос; 7 – всасывающий пульпопровод; 8 – корпус
Способ непосредственного всасывания грунта из-под воды достаточно эф- фективен при разработке не слежавшихся песков. Поэтому грунтозаборные уст- ройства большинства земснарядов, предназначенных для работы в плотных и связных грунтах, оснащают разрыхлителями, которые разрушают грунт непосред- ственно перед всасывающим отверстием. По принципу действия разрыхлители
49
можно разделить на два класса – гидравлические (рис. 8.3) и механические (рис. 8.4).
Рис. 8.3. Схема всасывающего наконечника:
1 – всасывающая труба; 2 – всасывающий патрубок; 3 – сопла; 4 – коллектор; 5 – труба для подачи воды
Водогрунтовую смесь всасывает грунтовый насос или, как его называют, землесос (рис. 8.5). В результате вращения рабочего колеса пульпа, заполняющая внутреннюю полость корпуса, отбрасывается от центра насоса к концам лопа- стей и направляется в отливной канал. Вследствие этого в центральной части на- соса образуется зона пониженного давления, в которую под влиянием атмосфер- ного давления устремляется пульпа от всасывающего патрубка.
Рис. 8.4. Схема фрезерного рыхлителя:
1 – фреза; 2 – всасывающее отверстие; 3 – всасывающая труба; 4 – ножи; 5 – рёбра ступицы; 6 – направление перемещения фрезы
50