

3836
.pdfВопрос о применении того или иного типа ПЧ решается исходя из технических требований к процессу управления. В тоже время, с учётом снижения цен на микроконтроллерную и силовую электронику – с одной стороны, и увеличением цены на энергоресурсы – с другой, всё большее применение находят векторные ПЧ.
При этом, существует возможность получения, при использовании новых алгоритмов управления векторными ПЧ, их дополнительной энергоэффективности.
Развитие технологии изготовления силовой и микропроцессорной техники является одним из путей повышения эффективности систем ПЧ – АД. Не менее важным аспектом в решении последней задачи является разработка соответствующих алгоритмов управления, которые позволяют расширить функциональные возможности рассматриваемой системы. Ведущую роль в этом плане в последние десятилетия отводится адаптивным системам управления, с помощью которых осуществляется наиболее полное регулирование и оптимизация наиболее важных параметров. Перспективным направлением адаптивных СУ, с использованием искусственных нейронных сетей (ИНС) [123-125]. Являясь прообразом математической модели мышления, ИНС реализуют две наиболее существенные для них особенности: способность свободного самостоятельного программирования (обучения) в условиях различной степени недетерминированных данных и, тесно связанная с данным обстоятельством, параллельная обработка информационных потоков [126, 127].
Применительно к системе ПЧ – АД, ИНС могут быть использованы для решения задач как совместно с модульным, так совместно и с векторными системами. В первом случае особого рассмотрения заслуживают вопросы IR, IZ компенсации, где оправдано применение ИНС для оценки параметров обобщённой электрической машины. Применительно к системам векторных ПЧ, помимо оценки параметров машины существенен вопрос настройки регуляторов положения и скорости, плохо решаемые методами настройки их на технический оптимум и имеющими значительные трудности при использовании ПИ – регулятора [123].
Кроме того, посредствам ИНС возможно расширение функциональных свойств систем ПЧ – АД за счёт возможности учёта слабо формализуемых информационных потоков: температурные
191
данные, человеческого фактора, возникновение аварийных ситуаций, формирование оптимума многих переменных.
Оценим возможности ИНС, проведя анализ математических моделей
ПЧ–АД (базовая система) и ИНС–ПЧ–АД. Рассмотрим одну из наиболее известных вариаций системы трансвекторного частотного управления – FOC (field–oriented control), т.е. «управление с ориентацией по полю» [123]. Этот выбор связан с широким практическим применение этого принципа в автоматизированных ЭП.
Простейший для практической реализации вид имеют уравнения электромагнитных процессов в АД в случае
представления их через вектор потокосцепления ротора – ψ 2 .
Именно по этой причине в качестве
базовых величин для управления системой FOC применяют ток статора –i1 и потокосцепление ротора – ψ 2 .
В качестве базовой математической модели для анализа характеристик ПЧ – АД и ИНС – ПЧ – АД рассмотрим модель FOC Induction Motor Drivers библиотеки SPS Matlab 2011b (рис.1), с параметрами АД : типоразмер – АИР180М4УЗ, P = 30 кВт, η = 91.5
%, cosϕ = 0,87 , n =1470 об/мин, J = 0.19 [128].
При этом в модели произведён учёт многофакторности параметров нагрузки и задания, за счёт введения блоков с переменными свойствами выходного сигнала. Данное обстоятельство позволяет, в первом приближении, учесть процессы в реальных объектах: изменение графика нагрузки тепловых и электрических сетях, системах ГВС и ХВС. В этих условиях видится достаточно перспективным применение ИНС, способной идентифицировать вектор входных данных, обладающих некоторой степенью неопределённости и поставить ему в соответствие векторы управления одним или несколькими параметрами системы с целью достижения оптимума некоторого функционала.
Более высокий уровень модели, на котором производится сопряжение системы FOC с источником питания и блоками вывода данных, представлен на рис.5.8 (параметры трёхфазного источника питания: V=400 В, f=50 Гц; 1–блок реализации интегральной оценки токов статора).
192
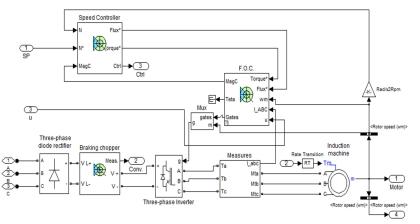
Рис.5.7. Модель FOC в Matlab 2011b
Верхний уровень СУ ПЧ–АД и ИНС–ПЧ–АД представлен на рис. 5.9.
В качестве задания скорости ЭП используем блоки Constant и Random Number. С помощью последнего реализуется учёт слабо формализуемых воздействий на информационный канал задания скорости выходного вала ЭП. Параметры Rand V – от 151,4 рад/с до 158,4 рад/с. Для реализации типового режима работы ЭП:
смомента времени t0=0 c. до t1=15с. – в системе осуществляется выход на скорость блока задания Rand V.;
сt1=15 c. до t2=21с. – в системе осуществляется торможение блоком задания wref1=0 рад/с.;
сt2=21 c. до t3=27с. – выход на скорость блока задания wref2=60 рад/с.;
сt3=27 c. до t4=31с. – торможение блоком задания wref1=0
рад/с. ;
сt4=31 c. до t5=40с. – выход на скорость блока задания wref3=30 рад/с.
193

Рис. 5.8. Субмодель блока FOC
Рис. 5.9. Верхний уровень СУ ПЧ–АД (блок FOC) и ИНС–ПЧ–АД (Model Reference Controller совместно с блоком FOC)
В качестве задания статической нагрузки используются блоки Step и Random Number, последний из которых реализует слабо формализуемые воздействия как внутри некоторой подсистемы нагрузки (её собственная неопределённость), так и на информационный канал идентификации параметров нагрузки.
Значение Step = 0,7 кг м2 , Random Number – от -0,35 до 0,35 кг м2
с величиной вариации – 0,1 кг м2 . Время приложения составляющей нагрузки Random Number – t = 0 c., составляющей Step – t = 4с.
194
В данной модели производится сравнение СУ ИНС – ПЧ – АД(FOC) на базе нейроконтроллера с эталонной моделью и отдельно системы ПЧ – АД (FOC). За эталонную модель для идентификации нейроконтроллера принята модель ПЧ – АД (FOC) – блок Subsystem рис.3, в которой, в качестве статического момента, приложена лишь слабо формализуемая составляющая (её настройки аналогичны блоку FOC, за исключением величины нагрузки). Блоки FOC и FOC-Plant (рис.3) имеют одинаковые настройки, за исключением дополнительных портов сопряжения / регулирования в случае системы FOC-Plant в структуре ИНС-ПЧ – АД.
Ниже приведены настройки блоков ИНС.
1.Блок идентификации параметров эталонной модели: структура – многослойный персептрон; количество нейронов скрытого слоя – 150; выборка интервала – 0,2 с.; количество элементов задержки на входе и выходе –2; тренировочная выборка – 1000; количество эпох настройки– 200; алгоритм настройки – trainbr.
2.Блок управления и идентификации реального объекта: структура – многослойный персептрон; количество нейронов скрытого слоя – 100; тренировочная выборка – 1000; количество эпох настройки– 200; количество сегментов настройки – 500.
Данные по степени идентификации составляющей тока iq эталонной модели представлены на рис. 5.10. Из них можно получить представление, с какой степенью точности блок идентификации ИНС распознаёт заданный сигнал для его дальнейшей обработки в блоке управления и идентификации реального объекта FOC-Plant. Конечной задачей ИНС является перенесение вектора управляющего воздействия – составляющей тока iq и вектора оптимального выходного параметра – минимизированного тока фазы статора с эталонной модели на модель FOC-Plant. На рис. 5.11 представлен результат обучения ИНС на выполнение поставленной задачи в части переноса вектора управления составляющей тока iq с эталонной на рабочую модель.
 А
А
195

 Б
Б
Рис. 5.10. Обучение нейросети идентификатора составляющей тока iq эталонной модели: А – набор возможных заданий
в нормализированной форме; Б – идентификация обучающего набора
А
Рис. 5.11. Обучение ИНС в целом: А – составляющая тока iq эталонной модели; Б – составляющая тока iq на выходе ИНС
Полученные в ходе моделирования результаты приведены на рис. 5.12 – рис. 5.14.
196

Рис. 5.12. Скорость выходного вала [рад/с]; 1 – ПЧ – АД, 2 – ИНС – ПЧ – АД
А
Б
Рис. 5.13. Токи статора [А], А – ПЧ – АД, Б – ИНС – ПЧ – АД
197

Рис. 5.14. Интегральная оценка суммы токов статора : 1 – ПЧ – АД, 2 – ИНС – ПЧ – АД
Полученные в результате моделирования данные свидетельствуют о возможности получения положительного эффекта от применения, совместно с системой трансвекторного частотного управления, нейроконтроллера регулирующего управляющее
воздействие (составляющую тока – iq ) [129]. Посредством этого
осуществляется снижение потерь тока в обмотках статора (рис.7 и 8). При достижении вышеуказанного положительного эффекта сохраняются удовлетворительные показатели качества (рис.6) по иным параметрам исследуемого ЭП в сравнении с системой ПЧ – АД
(FOC).
Необходимо отметить, что применение данной системы управления (ИНС – ПЧ – АД) приводит к повышению требований уровня аппаратного и программного обеспечения в сравнении с системой ПЧ – АД (FOC).
5.2.2. Программные средства управления переходными режимами частотно регулируемых электроприводов с использованием ННС
Как отмечалось выше, высокий уровень оптимального управления в системах энергоснабжения, может быть достигнут путем широкого применения технологии FACTS, позволяющей создавать системы с активно–адаптивными элементами на всех
198
уровнях (в т.ч. в распределительных сетях, центральных тепловых пунктах, объектах, созданных по принципу «умный дом»). Остановимся подробнее на рассмотрении подсистем ЖКХ,т.к. именно в этой сфере, наряду производственным сектором, используются огромное количество автоматизированных электроприводов на основе асинхронного двигателя (АД) для насосного и вентиляторного оборудования, а также нужды на освещение [130]).
Всему оборудованию данного сегмента (насосы, вентиляторы, компрессоры) ЖКХ наряду с режимами продолжительной работы свойственны повторно – кратковременные режимы (S4-S8), занимающие значительную долю от времени функционирования.
Как следствие, в целях снижения энергопотерь, для данного типа оборудования важное значение имеет задача оптимизации переходных процессов. Для этого наиболее перспективным считается использование преобразователей частоты (ПЧ) и устройств плавного пуска (УПП).
Эти устройства позволяют снизить пусковые токи и избежать рывков в механической части привода или гидравлических ударов в трубах и задвижках в момент пуска насосов систем водоснабжения.
Наиболее распространённым СУ приводами переменного тока присущи следующие недостатки:
–при управлении от этих устройств гарантируется защита только основного двигателя. В алгоритмах, которые заложены в ПЧ защита обеспечена тому двигателю, который в данный момент управляется от ПЧ. Защита же остальных двигателей, работающих от сети, возлагается на их пускорегулирующую аппаратуру (контакторы, пускатели);
–выход из строя ПЧ, УПП означает невозможность продолжения работы в заданном режиме;
–отсутствует или недостаточно разработан верхний уровень выработки управляющих воздействий группами оборудования;
–алгоритмы задаются для каждой группы, исходя из некоторых статистических данных за определённый период и без учёта возмущающих факторов в реальном времени;
–задача прогнозирования расхода энергоресурсов решается путём ступенчатых приближений, при этом существенно возрастают потери в системе.
199

Одно из решение поставленных проблем в области выбора и реализации алгоритмов управления частотного ЭП видится в применение наряду с системами микроконтроллерного управления, опирающимися на булеву логику, систем, использующих нечёткую логику и нейросетевые структуры.
При этом можно достичь, например, минимума потерь энергоресурсов в пространстве многих переменных: давление в трубопроводе, температура прямого и обратного тока теплоносителя в контуре отопления, температура воздуха в помещении и температура воздуха окружающей среды, величина солнечной инсоляции и скорость ветра, учёт материала теплоизоляции системы и целостности трубопровода и т.д..
По аналогии с анализом, проведенным в предыдущем разделе, ниже будет рассмотрена система управления ПЧ – АД с регуляторами, основой которых являются ИНС с эталонной моделью, функционирующие в реальном времени (рис. 5.15). Существенным преимуществом таких систем является отсутствие проблем, связанных с выбором оптимальной нейросетевой модели и «переобучением» ИНС [126].
Вначале определим характеристики электропривода без применения ИНС–регуляторов, а затем характеристики системы ПЧ– АД вместе с ним в различных динамических режимах работы. Схема модели представлена на рис. 5.16.
Рис. 5.15. Схема ИНС регулятора с использованием эталонной модели в реальном времени
200