

3635
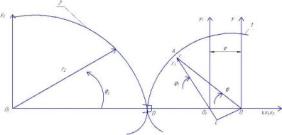
.pdfзацепления Р меняет свое положение (рис. 1) в зависимости от геометрической формы зубчатых колес и заданного закона их движения. Основным требованием, предъявляемым к кинематике некруглых цилиндрических зубчатых передач, является сохранение передаточного числа в определенном диапазоне. Такое условие возможно при постоянном контакте воображаемых линий при качении их друг по другу без скольжения. В теории зацепления такие мнимые линии называются начальными кривыми.
Рис. 1. Изменение положения полюса зацепления Р
Геометрические особенности начальных кривых зависят от параметров сопряженных рабочих профилей зубьев.
Из теоретической механики известно (рис. 1), что точка Р является мгновенным центром скоростей вращающихся кривых относительно стоек 0, а начальные кривые представляют собой центроиды Ц1 и Ц2 в относительном движении начальных кривых, так как движутся по поверхности друг друга без скольжения. Аналитический расчет эллипсоидных зубчатых колес начинается с определения геометрических особенностей указанных центроид.
Для некруглых зубчатых овальных и эллиптических колес, центроидами будут овалы и эллипсы. Обычно в таких колесах задаются только функциями перемещения колес в аналитическом или в табличном виде.
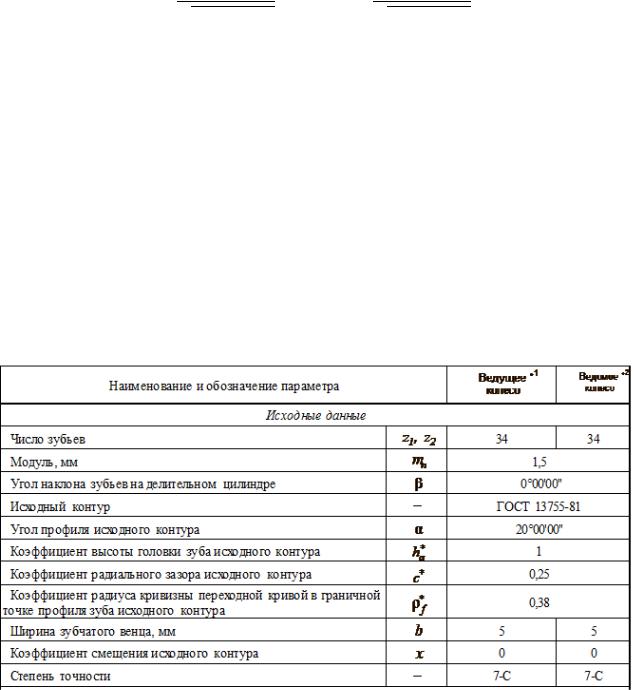
Считаем, что зубья будут прямые некоррегированные и нарезаться без коэффициента смещения. Также известны модуль , число зубьев приводного звена (как правило – шестерни) , передаточное число Очевидно, что диапазон измененияпередаточногочислазубчатого зацепления зависит от геометрической формы центроид. ДЛя некруглых колес это число переменно, и изменяется по определенному закону.
Основной задачей при расчете некруглых зубчатых колес является получение точного значения межосевого расстояния, которое полностью удовлетворяет условию замкнутости центроиды некруглого колеса. Из-за сложности ее геометрической формы необходима зависимость между углами поворота колес передачи (рис. 2).
30
|
|
Рис. 2. Центроиды передачи |
|
|
|
||||||||
Координаты точки |
в системе |
|
вычислим по формуле |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
. |
|
3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координаты точки |
в системе |
|
|
вычислим по формуле |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
, |
4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначим: |
– взаимосвязанные углы поворота шестерни и колеса; |
||||||||||||
– соответствующие радиусы центроид. |
|
|
|
||||||||||
Из рис. 2 следует, что в точке касания центроид, точке |
, на линии |
||||||||||||
верно равенство (6) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
. |
|
|
|
|
(5) |
||
Угол выразим через |
по формуле (7) |
|
|
|
|||||||||
|
|
|
( |
|
) |
( |
|
|
|
|
) |
6) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выразим угол |
из условия качения центроид без скольжения в диффе- |
||||||||||||
ренциальной форме через бесконечно малые углы: |
|
|
|
||||||||||
|
|
|
|
|
|
. |
|
|
|
8) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выразив из (9) |
, получим формулу |
|
|
|
|||||||||
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
(9) |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
√ |
|
( |
|
) |
|
|
|
|
|
|
|
Так как невозможно получить точные значения функции |
( ), то |
||||||||||||
рассмотрим другой более рациональный способ расчета с помощью метода
Гаусса. Сущность метода такова. Определенный интеграл |
∫ |
( ) , |
величину которого необходимо найти, заменяется интегралом |
∫ |
( ) . |
Входными параметрами являются смещение и текущие величины угла
.С помощью данного блока, путем последовательных приближений для межосевого расстояния выполним условие замкнутости центроиды зубчатого колеса.
31

Произвольно задаваясь |
значениями , получим табличную функцию |
|
( ) и по формуле (5) |
вычислим величины радиусов |
и координаты |
соответствующих точек на центроиде колесапо формуле
. |
11) |
|
|
После этого можем смоделировать центроиду колеса в виде ломаной |
|
линии. |
|
Далее разместим зубья на центроидах колес. Для точности считаем, что в исходном положении на линии центров совпадают ось зуба колеса и ось впадины шестерни, а дискретные, теперь уже непроизвольные, величины соответствуют позициям впадин шестерни на центроиде.
Зубья и впадины шестерни распределены по делительной окружности
радиуса r с постоянным угловым шагом |
|
|
. Координаты точек пересечения |
||||
|
|
||||||
осей впадин с центроидой в системе координат |
(рис. |
3) будут определяться |
|||||
формулами |
(2–5). Используя приведенный |
алгоритм, |
получим табличные |
||||
(по числу зубьев шестерни) функции ( |
), ( |
), ( ), а также передаточное |
|||||
число ( |
) |
|
. В отмеченных точках шестерни можем изобразить зубья, |
||||
|
|||||||
при этом координаты профилей зубьев для изображения на рисунке найдем по способу, описанному в [1, 4].
Рис. 3. Прототип модели некруглой цилиндрической зубчатой передачи
Переходим к колесу 2. Функции ( ), ( ) определяют разметку колеса. В этих точках необходимо разместить зубья. Используем метод приведенного колеса, в котором каждый зуб вычисляется как зуб круглого колеса с делительной окружностью, радиус которой равен радиусу кривизны центроиды в соответствующем месте.
32
Радиус кривизны плоской кривой определим по известной формуле, при наших обозначениях она будет иметь вид
[ |
( |
) ] |
|
|
|
|
|||
|
|
|
||
| |
( ) |
| |
||
Производные, входящие в формулу, получим, используя выражения
(3)-(5).Координаты центров кривизны рассчитаем по формулам:
√ ( ) √ ( ) 12)
где верхние знаки принимаются для выпуклой (верхней) части центроиды, нижние – для вогнутой (нижней) части.
Соприкасающуюся окружность радиуса |
устанавливаем в |
центр |
||
кривизны и, считая ее начальной, находим приведенное число зубьев |
|
|
. |
|
|
||||
Рассчитываем координаты зуба такого приведенного колеса в локальной системе координат. Используя формулы преобразования, переводим рассчитанные координаты в систему координат колеса. При четном числе и достаточно определить зубья на одной четверти колеса, а затем
использовать условия симметричности. Из анализа приведенного алгоритма, следует, что для проектированиязубчатых передач с переменным передаточным числом достаточно иметь функцию ( ) и ее производные.
Геометрический расчёт цилиндрической некруглой зубчатой передачи внешнего зацепления
33

Построены 2D и 3D модели некруглых зубатых колес и изготовлен прототип передачи на 3D принтере.
Таким образом, разработанная методика позволяет проектировать некруглые колеса с заданными характеристиками, например, с заданным законом движения выходного звена, окружной скоростью, частой вращения шестерни.
Литература
1.Литвин, Ф. Л. Некруглые зубчатые колеса: учеб. пособие / А. В. Аверченков, А. А. Жолобов – М: Машиностроение, 2011. – 426 с.
2.Попова О.И. Инструментальное обеспечение изготовления червячных колес редукторов энергетической промышленности/ М.И., Попова, Л.С. Печенкина, А.В. Демидов/ Материалы международной научно-практической конференции «Альтернативная и интеллектуальная энергетика» 6-8 декабря 2018 г. - Воронеж (ВГТУ). - С. 51-53.
3.Демидов А. В. Прототипирование деталей машин / В. А. Нилов /
Всборнике: информационные системы и технологии: достижения и перспективы материалы международной научной конференции. 2018. С. 244246.
4.Детали машин и основы конструирования: расчетно-графический практикум: учеб пособие / В.А. Нилов, Р.А. Жилин, О.К. Битюцких, А.В. Демидов. Старый оскол: ООО «Тонкие наукоемкие технологии», 2019. – 136 с.
34
УДК 629.3.051
БЕСПРОВОДНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ И ХРАНЕНИЯ ДАННЫХ
И.С. Мишустин1, А.И. Сукачев2, Е.А. Сукачева3 1Студент гр. РП-152, dr.vanyok@gmail.com
2Старший преподаватель кафедры РЭУС, mag.dip@yandex.ru
3Студентка гр. мРКИ-182,milena_s_13@mail.ru
ФГБОУ ВО «Воронежский государственный технический университет»
Встатье рассматривается структурная схема устройства идентификации и хранения данных. Отличительной особенностью данного устройства является использование совершенно нового подхода к организации обмена информацией между ПК и внешним хранилищем данных.
Ключевые слова: Wireless USB, IoT, беспроводной интерфейс подключения, беспроводная передача, данных, твердотельный флэш-накопитель.
Всовременном мире появилась возможность использовать устройства
беспроводной передачи информации, а также устройства бесконтактного доступа. Данная разработка подходит под эту категорию. Отличительной особенностью является возможность использования флэш-накопителей без необходимости подключения устройства к персональному компьютеру (ПК). В свою очередь это облегчает работу с носителем, а также повышает уровень доступности использования этого устройства.
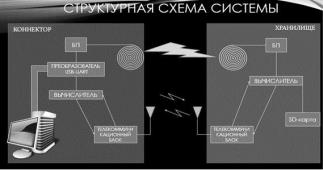
Устройство представляет собой беспроводной флэш-накопитель и докстанцию (коннектор). При непосредственной близости флэш-накопителя и докстанции,происходит установка связи между устройствами, посредством телекоммуникационного блока (ТКБ), док-станция осуществляет питание флэш накопителя посредством стандарта QI. В результате пользователь получает доступ ко всем данным, хранящимся на флэш-накопителе и возможность работы с ними. Принцип работы аппаратно-программного комплекса представлен на рис. 1.
Рис. 1. Структурная схема устройства
35
Питание схемы осуществляется по принципу магнитно-связанных катушек.
Помимо источника питания, важное место в работе устройства занимают вычислитель и телекоммуникационный блок. По большей части это два разных устройств, но с развитием науки и техники, все чаще стали появляться устройства, совмещающие в себе оба свойства.
В качестве вычислителя рассматриваются микроконтроллеры:
ATmega328Р и ESP32.
ATmega328P. Согласно технической спецификации для питания микроконтроллера ATmega328P требуется напряжение в диапазоне 1.8-5.5В.
Взависимости от напряжения питания микроконтроллер производит
вычисления счастотами:0 - 4MHz@1.8 - 5.5V, 0 - 10MHz@2.7 - 5.5.V, 0 - 20MHz@4.5 - 5.5V. Т.е. для получения большей скорости вычисления требуется большее напряжение питания, следовательно, необходима большая мощность излучателя блока питания.
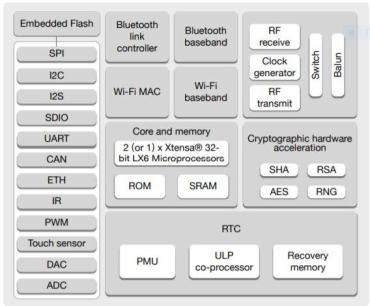
ESP32. Имеет встроенные блокиWi-fiи Bluetooth (рис. 2), а значит более компактное расположение комплектующих.
Рис. 2. Структурная блок-схема ESP 32
Рабочее напряжение микроконтроллера лежит в диапазоне 1.8-3.6В, следовательно, требует меньшее мощности излучателя блока питания. Управление питанием осуществляется благодаря минимальному взаимодействию с хостом для минимизации периода активной нагрузки.
ESP32 реализует полный протокол Wi-fi MAC 802.11 b/g/n. Поддерживает базовый набор услуг (BSS).
Согласно IEEE – 802.11:
стандарт 802.11b имеет максимальную скорость – 11Мбит/сек, радиус действия в помещении – до 30 м;
36
802.11g – максимальная скорость – 54Мбит/сек, радиус действия –
до 50 м;
802.11n – максимальная скорость – 300-600Мбит/сек, радиус действия – до 100 м.
Данные радиусы действия влекут за собой угрозу утечки данных при передаче и, соответственно, необходимость использования протоколов защиты.
Кроме этого, микроконтроллер имеет стек Bluetooth,соответствующий спецификациям Bluetooth v4.2 и Bluetooth LE. Из плюсов, данная спецификация
имеет сниженное энергопотребление и минимальную дальность действия в 10 м, что меньше дальности действия Wi-fi. Из минусов – малая скорость передачи данных 4 Мб/с.
Резюмируя выше сказанное, целесообразно использование микроконтроллера ESP32, представляющего больше возможностей при компактном исполнении.
Литература
1.Сукачев А.И. Разработка аппаратно-программной платформы интернета вещей / Сукачев А.И., Миллер И.В., Сукачева Е.А. // Радиоэлектроника. Проблемы и перспективы развития Четвёртая Всероссийская молодёжная научная конференция, посвящённая дню радио. 2019. С. 210-212.
2.Сукачев А.И. Особенности проектирования устройств беспроводной передачи энергии / Сукачев А. И., МишустинИ.С.,Сукачева Е. А., Худяков Ю. В. // Материалы Всероссийской научной конференции«Цифровая трансформация в энергетике». г. Тамбов. 2020. С. 124-127
3.SemenovV.YU Development of portable charger with data storage function / Semenov V.YU.,Sukachev A.I. // Modern informatization problems in the technological and telecommunication systems analysis and synthesis (MIP-2020'AS) Proceedings of the XXV-th International Open Science Conference. 2020. C. 265268
4.Сукачев А.И. Особенности проектирования энергосберегающего устройства с функцией хранения данных / Сукачев А. И., Балашов Ю. С., Семенов В.Ю., Сукачева Е. А. // Материалы Всероссийской научной конференции «Цифровая трансформация в энергетике». г. Тамбов. 2020. С. 375
–378
5.Сукачев А.И. Особенности разработки беспроводного устройства приема, хранения и передачи данных / Сукачев А.И., ЧесноковП.С.,МишустинИ.С.,РусановА.В. // сборник научных статей по итогам второй международной научной конференции«Приоритетные направления инновационной деятельности в промышленности». 2020. С. 180-182
37
УДК 004.4
ВИЗУАЛЬНОЕ ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ ИНТЕЛЛЕКТОМ НА ОСНОВЕ ПОЛЕЗНОСТИ
А.К. Донских1, В.Ф. Барабанов2
Аспирант гр. аСАИ-19, ak_donskikh@mail.ru
Д-р техн. наук, профессор, bvf@list.ru
ФГБОУ ВО «Воронежский государственный технический университет»
Принятие решений лежит в основе любой системы искусственного интеллекта (ИИ). Существуют множество различных подходов к принятию решений. Одним из самых мощных решений является система Utility AI, которая основывается на выборе наилучшей стратегии на базе эвристических оценок, что позволят ИИ адаптироваться к различной ситуации. Но у Utility AI имеет недостаток: сложность визуализации и средств проектирования. В докладе представлено использование дерева поведения для упрощения проектирования стратегий и расчета эвристик Utility AI для цифрового управления ИИ. Предложен вариант визуального проектирования искусственного интеллекта на базе системы Utility AI. Приведены преимущества и недостатки совмещения средств проектирования искусственного интеллекта.
Ключевые слова: система принятия решений, Utility AI, дерево поведения, визуальное программирование.
Теория полезности используется в таких областях, как психология, экономика, социология и теория игр. Применяя теорию полезности совместно
стакими алгоритмическими методами, как кривая реакции и взвешенные случайности можно улучшить моделирование ИИ агентов, расширить пространство потенциального решения и даже управлять граничными случаями, в которых другие системы принятия решений могут испытывать трудности.
Utility AI по сути оперирует не правилами если-то, а наборами действий, полезность каждого из которых рассчитывается на основе набора оценок. Каждая оценка отвечает на вопрос: насколько выгодно определенное действие
скакой-либо стороны. Utility AI позволяет сделать из запутанного графа состояний и наборов если/то слабо связанный набор доступных действий и их оценок.
На рис. 1 приведен пример схемы Utility AI.
Как видно из рисунка, для Utility AI имеется набор действий, оценок для каждого действия и очков. Возможны различные системы, например, в которых оценки сразу выдают и количество очков, которые затем могут либо суммироваться, либо перемножаться.
38
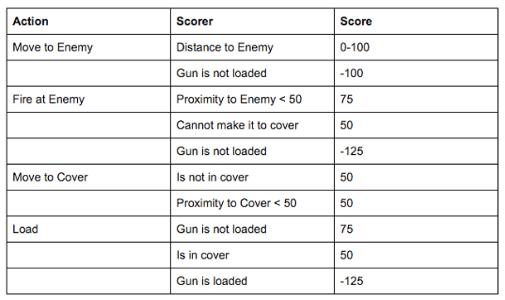
Рис. 1. Пример схемы Utility AI
Можно предложить несколько способов проектирования Utility AI. Каждый из них имеет свои преимущества и недостатки.
1.Визуальное проектирование. Создается граф, связывающий между собой действия и их оценки. Имеет низкий порог вхождения для дизайнера ИИ, но слабую расширяемость.
2.Текстовое описание. Описание действий и их оценок с помощью текста, например, в формате xml. Имеет большой порог вхождения для дизайнера ИИ, но зато выше расширяемость.
3.Программирование на ЯП. Все действия и их оценки программируются на выбранном ЯП, например создаются как экземпляры какого-либо класса. Имеет наивысшую расширяемость, но дизайнер ИИ должен знать выбранный ЯП.
Рассмотрим вариант с визуальным проектированием. Система Utility AI
свозможностью визуального проектирования представлена на рис. 2.
39