

3293
.pdfПредлагаемое программное обеспечение позволяет быстро и открыто рассчитать потери, а также, исходя из мощности двигателя электропривода, выбирать минимальное сечения провода. Интерфейс продукта представлен на рис. 1 в публикации [1].
Описание позиций, которые необходимо заполнить или выбрать из предложенного списка, и позиции, которые рассчитываются и заполняются автоматически или являются статичными, но могут быть изменены при необходимости в ручном режиме ввода, подробно рассматривается в [1].
На рис. 2 в публикации [1] представлены данные, которые используются алгоритмами при проведении расчета.
Представленные списки данных могут быть заменены при выполнении каждого нового проекта при использовании других электроприводов, средств автоматизации, а, следовательно, проводов, что позволяет рассматриваемой программе при всей своей узкой направленности стать универсальным средством для проведения подобного рода расчетов.
После заполнения необходимых позиций в таблице, программное средство обращается к данным и наглядно производит расчет, что позволяет его проверять и контролировать на всех этапах. Дальнейшие алгоритмы расчета подробно рассматривается в [1].
Неоспоримыми преимуществами использования данных алгоритмов в электронных таблицах Excel при проектировании являются: высокая скорость и удобность заполнения таблиц; открытый и наглядный расчет; эргономичность последующего форматирования и использования данных; гибкость программы под различные массивы данных проектирования; возможность модернизации программы для автоматического заполнения определенных позиций в ведомости объёмов работ и смете проекта; возможность дополнять алгоритмы различными нестандартными расчетами.
Существует возможность перенести алгоритмы в Google Docs для последующего одновременного корпоративного доступа к таблицам с возможностью их редактирования для каждого пользователя [1].
Далее рассмотрим, как можно реализовать модернизацию данных автоматизированных алгоритмов.
91
Первое усовершенствование позволяет реализовать автоматический подсчет длины проводов определенного сечения.
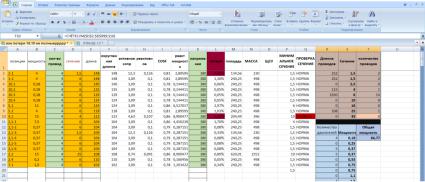
На рис. 1 показано, что в выделенном диапазоне ячеек находится выходное количество проводов и сумма длин проводов определенного сечения. С таким алгоритмом проектировщики смогут, просто заполнив таблицу с двигателями и выбрав провода, сразу получить конечные значения длины проводов определенного сечения, а также количество отрезков провода, значение которого используется для формирования кабельного журнала, а также для спецификаций.
Рис. 1
Ниже представлено как реализуется второе усовершенствование, связанное с количеством и общей мощностью двигателей. Теперь инженер-проектировщик, реализующий данный модернизированный алгоритм, как только заполнит таблицу, получит сразу рассчитанную общую номинальную мощность двигателей (см. рис. 2).
Данное усовершенствование алгоритма экономит время на предварительных расчетах технической мощности, необходимой заказчикам для принятия решений относительно необходимости постройки подстанций для данного объекта. Так же появилась графа с подсчетом количества двигателей определенной мощности всего проекта.
Третьим усовершенствованием является перенос всей программы на платформу Google Docs.
92

Платформа от Google Docs позволяет данной программе не только работать на любом компьютере или смартфоне, но и делает это бесплатно и не требует установки приложений, браузера и интернет соединения вполне достаточно, также поддерживается оффлайн режим.
Рис. 2
Также через настройки доступа можно сделать групповой доступ к файлу и наблюдение. Редактирование можно выполнять в реальном времени, что больше не требует сохранять файл для того чтобы он мог быть изменен в локальной сети. Таким образом, над одним файлом проекта смогут сразу работать несколько инженеров-проектировщиков, наблюдая картину в реальном времени.
Литература
1.Шишкин Е. А. Использование программного
обеспечения для оптимизации |
решения |
проектных задач |
в электроснабжении / Е. А. |
Шишкин, |
Н. В. Ситников, |
С. А. Горемыкин // Прикладные задачи электромеханики, энергетики, электроники: труды Всерос. студенческой науч.-техн. конф. [Электронный ресурс]. – Воронеж: ФГБОУ ВО «Воронежский государственный технический университет», 2018.
– C. 179-181.
Воронежский государственный технический университет
93
УДК 628.971
Е. В. Тройнин, А. И. Косовцев, Н. И. Климентов, С. А. Горемыкин
УПРАВЛЕНИЕ СЕТЯМИ НАРУЖНОГО ОСВЕЩЕНИЯ
Рассмотрены основные сведения и технические данные шкафа управления наружным освещением «Деконт ШУНО MC02.LE».
Ключевые слова: наружное освещение, шкаф управления, автоматизированная система управления.
Управление осветительными сетями является технической задачей, в решения которой входят условия эксплуатации осветительной установки, создание хорошего и легко управляемого освещения и возможность рационального расходования электроэнергии.
Управление освещением в зависимости от местоположения пунктов управления может быть местным или дистанционным.
В зависимости от способа управления при помощи местных коммутационных аппаратов управление может быть ручным или автоматическим. Ручное управление подразумевает включение или выключение освещения непосредственно работниками, когда это необходимо. Автоматическая система работает при помощи фотодатчиков, работающих от изменений величины освещенности, создаваемой естественным светом, и таймеров, осуществляющих включение и отключение осветительной сети в определенное, заданное время.
Ниже рассмотрены основные сведения и технические данные шкафа управления наружным освещением (ШУНО) [1].
Шкаф управления наружным освещением предназначен для контроля и управления оборудованием, для приема электроэнергии, ее учета и распределения в присоединенные сети наружного освещения. Контролируемое и управляемое оборудование размещается в шкафах типа ВРШ-НО-М8 и ВРШ- НО-М12. ШУНО может использоваться в качестве автономного устройства управления, а также в составе автоматизированных систем управления наружным освещением (АСУНО).
ШУНО предназначен для питания от одноили трехфазной сети переменного напряжения 220/380 В, частотой 50 Гц с нулевым проводом (глухозаземленной нейтралью) и для сбора, обработки,
94
хранения и передачи информации о контролируемых и измеряемых параметрах, информации о состоянии оборудования, а также для формирования управляющих воздействий, в соответствии с установленным регламентом работы технологических объектов.
Внем осуществляется контроль следующих параметров:
-наличие напряжения (~ 220 В) до и после плавких вставок
ВРУ;
- |
наличие |
напряжения питания |
на входах |
«ночного» |
и «вечернего» контакторов; |
|
|
||
- |
наличие |
фазного напряжения |
(~ 220 В) |
на выходах |
предохранителей каждой из отходящих линий; |
|
|||
-превышение напряжения в контролируемых точках свыше
242 В;
-положение «ночных» и «вечерних» контакторов;
-положение ключей выбора режимов работы;
-состояние устройств защиты от перегрузки отходящих
линий;
-состояние датчиков несанкционированного доступа в шкаф управления наружным освещением;
-срабатывание пожарной сигнализации;
-срабатывание охранно-предупредительной сигнализации пункта питания наружного освещения.
Количество входных сигналов переменного напряжения
110 В – до 48.
Количество входных сигналов постоянного напряжения 24 В (или постоянного тока от 0 до 20 мА) – до 18.
ШУНО осуществляет сбор результатов измерений с электросчётчика по цифровому интерфейсу. Интерфейс определяется выбором электросчётчика и установленной соответствующей мезонинной интерфейсной платой контроллера.
Шкаф обеспечивает следующие режимы управления двумя контакторами:
-дистанционный – формирование управляющих воздействий осуществляется встроенным контроллером в соответствии с режимами работы контакторов; ключ выбора режима в положении «Дист»;
-местный – формирование управляющих воздействий осуществляется с помощью ключей управления, расположенных на
95
двери шкафа; ключ выбора режима в положении «Выкл» или
«Вкл».
В дистанционном режиме управления ШУНО обеспечивает следующие режимы работы двух контакторов:
-автономный – это когда формирование управляющих воздействий производится встроенным контроллером по запрограммированному временному графику;
-телеадресный – в этом режиме формирование управляющих
воздействий |
производится |
встроенным |
контроллером |
всоответствии с «адресными» командами с диспетчерского пункта;
-каскадный – формирование управляющих воздействий производится по сигналам с линий «каскадного» управления.
При этом предусмотрена возможность формирования
управляющих |
воздействий |
для |
реализации |
освещения |
в «вечернем» и «ночном» режимах. |
|
|
||
При исчезновении связи с верхним уровнем управления на |
||||
время более |
30 мин устройство |
автоматически |
переходит |
|
в автономный режим работы.
Комплекс технических средств шкафа управления наружным освещением производит самодиагностику работоспособности. При
наличии аварийных |
событий производится их фиксация, |
с указанием даты и |
времени начала и завершения событий |
в «Журнале событий».
ШУНО производит обмен данными с системой верхнего уровня по каналу Ethemet или по каналам сотовой связи через установленный в нем LTE-роутер. Обмен осуществляется по протоколам OPC UA и/или МЭК 60870-5-104. Встроенный WEBинтерфейс обеспечивает управление работой контроллера, конфигурирование сетевых параметров, отладку прикладного программного обеспечения и т.п.
Примененный в ШУНО модуль бесперебойного питания (-24V DC) обеспечивает работоспособность ШУНО и сетевого оборудования при отсутствии напряжения в питающей сети в течение времени достаточном для передачи на верхний уровень АСУНО информации о пропадании питания в пункте наружного освещения (не менее 2 мин). Модуль обеспечивает работоспособность в расширенном диапазоне температур.
Первичный источник питания обеспечивает выходное напряжение постоянного тока 24±0.5 В при напряжении питания
96
в диапазоне 120÷265 В для переменного напряжения и 160÷300 В для постоянного напряжения. Величина пульсаций выходного напряжения не более 0.2 В, электрическая прочность изоляции – 2500 В, максимальный ток нагрузки в рабочем диапазоне температур – 1.5 А, допустимая перегрузка в течение 1с – 3 А. Блок питания снабжен защитой от перенапряжения и перегрузки по входу, а также от перегрузки и короткого замыкания по выходу. Источник обеспечивает «мягкий» запуск.
Имеется возможность интеграции ШУНО в автоматизированную систему коммерческого учета электроэнергии (АСКУЭ). Электросчётчик «Меркурий-234 ARTM» (230-ART) по встроенному интерфейсу RS-485 (CAN) подключается к контроллеру «Dekont-A9» (порт «С», мезонинный модуль
«A9-RS485» или «A9-MRC12»).
С сервера АСКУЭ при его доступе в сеть АСУНО обеспечивается возможность доступа к электросчётчику, подключенному к контроллеру ШУНО для работы с ним без ограничения функциональности (конфигурирование, чтение текущих и архивных данных, синхронизация времени и т.д.).
Перспективным направлением развития автоматизированных систем управления наружным освещением являются [2] системы с плавным дистанционным управлением яркостью и адресным контролем каждого светильника.
Литература
1.Шкаф управления наружным освещением «Деконт ШУНО-МС02.LE». Паспорт ДПАВ.425280.01 ПС. ООО Компания ДЭП. – М., 2015.
2.[Электронный ресурс]. – http://light-09.ru/wp-content/ uploads/2015/05/Avtom-v-prom-ti_statya-v.4_Final.pdf.
Ростовский государственный университет путей сообщения (Воронежский филиал)
97
УДК 621.313
М. О. Коновалов, О. А. Киселёва
УПРАВЛЕНИЕ ИСТОЧНИКОМ ЭНЕРГИИ ЗА СЧЕТ ОРИЕНТАЦИИ ПЛОСКОСТИ СОЛНЕЧНОЙ БАТАРЕИ
В работе проводятся исследования источника энергии на солнечных батареях с целью повышения его эффективности. Рассматриваются устройства для изменения угла положения плоскости солнечной батареи в пространстве для обеспечения ориентации на Солнце. Проанализированы потери мощности, связанные с расходами на питание электроприводов. Рассмотрены различные варианты построения систем ориентации.
Ключевые слова: источник энергии, солнечная батарея, энергоэффективность, электропривод, система ориентации.
Солнечные батареи собирают из жестких или гибких панелей с закрепленными на них полупроводниковыми фотоэлементами. Особый интерес представляет ориентация солнечных батарей на космических спутниках, их изготавливают жесткими и гибкими. Солнечные батареи могут крепиться как в отдельном энергетическом отсеке, так и на космическом аппарате.
Космический корабль проходит области тени и освещённости, поэтому автономная фотоэлектрическая энергоустановка должна включать не только систему управления слежения солнечных батарей за Солнцем, но и систему, которая осуществляла бы автоматический переход аккумуляторов из режима заряда в режим обеспечения энергией космического аппарата. Каждая система, которая должна обеспечивать работу в режиме максимума выработки энергии солнечными батареями, должна быть спроектирована с учетом минимального потребления энергии электроприводами поиска этого режима.
Устройства слежения за Солнцем содержат электропривод и систему управления. Электропривод часто выполняют на бесконтактных двигателях постоянного тока, так как они питаются от того же источника, которым управляют, обеспечивая энергоэффективные режимы. Применение этих электроприводов будет оправдано в тех случаях, когда они будут компенсировать затраты энергии на их работу за счет повышения производительности солнечных батарей. При этом стоимость
98
устройств наведения установки должна уменьшаться даже при повышении выработки электроэнергии. Блоками контроля максимальной мощности фотоэлектрических модулей снабжено большинство современных инверторов и контроллеров заряда.
Внастоящее время в качестве электроприводов наведения используют системы с бесконтактными двигателями постоянного тока, так они по своим характеристикам наиболее подходят для малых космических аппаратов. Это связано с тем, что они имеют минимальную массу по сравнению с другими электроприводами
[1-4].
Бесконтактные двигатели постоянного тока имеют срок, намного превышающий срок службы малого космического аппарата, малые габариты и вес, при этом они обладают хорошими качественными характеристиками в режиме слежения. Эти двигатели прошли натурные испытания на космических аппаратах при работе в вакууме.
Система электроприводов должна обеспечивать повороты правого и левого крыльев солнечных батарей.
Всостав бортовой системы управления космическим аппаратом входят бортовые цифровые вычислительные машины,
вкоторых реализуются алгоритмы, обеспечивающие управление ориентацией и системами, в том числе управление ориентацией солнечной батареей.
Определение направления на Солнце относительно корпуса космического аппарата осуществляется при помощи алгоритмов системы управления движением на основе информации, поступающей, например, от астродатчиков либо солнечных датчиков. Алгоритмы управления ориентацией солнечных батарей определяют её угловое положение на основе информации,
поступающей от датчика угла, осуществляют его сравнение с информацией о заданном направлении на Солнце.
При наличии рассогласования между пространственным положением солнечной батареи и ориентиром на максимально эффективное положение в программе управления есть алгоритмы, которые создадут управляющий сигнал на поворот батареи до состояния, при котором она обеспечит максимальное значение. Команда на перемещение будет поступать дискретно, система может находиться в неподвижном состоянии, что значительно сократит потребление энергии.
99
Исследования, которые были проведены по разработанной математической модели электропривода с бесконтактными двигателями постоянного тока для коррекции положения солнечных батарей на малых космических аппаратах, показали, что наиболее энергосберегающими режимами будут обладать логикодинамические дискретные системы с минимальным числом переключений.
Места крепления блоков с бесконтактными двигателями чаще всего зависят от центра масс всего малого космического аппарата.
Литература
1.Киселёва О. А. Дискретный эквивалент идеальному векторному управлению бесконтактным двигателем постоянного тока / О. А. Киселева, С. А. Винокуров, Т. В. Попова // Моделирование, оптимизация и информационные технологии.
2017. – № 1 (16). – С. 16.
2.Киселёва О. А. Функции регулятора тока системы
управления бесконтактным двигателем постоянного тока / О. А. Киселёва, Д. П. Киселёв, Т. В. Попова // Моделирование, оптимизация и информационные технологии. Научный журнал № 1 (8). – 2015. http://moit.vivt.ru/
3. Романов А. В. Влияние нулевых векторов на управляющую
функцию |
бесконтактного |
двигателя постоянного |
тока |
/ |
А. В. Романов, О. А. Киселёва, Д. П. Киселёв // Энергия – ХХI. – |
||||
2015. – № 2 |
(90). – С.108-113. |
|
|
|
4. Медведев В. А. Выбор ведущего базового вектора в системе |
||||
управления |
бесконтактным |
двигателем постоянного |
тока |
/ |
В. А. Медведев, Т. В. Попова, О. А. Киселёва // Энергия – ХХI. – |
||||
2016. – № 1 |
(93). – С.46-52. |
|
|
|
Воронежский государственный технический университет
100