

Обмоточные данные двигателя
Тип обмотки статора: ____________________________________
Шаг обмотки: |
y = ________ . |
Число эффективных проводников в пазу |
Sп = ________ . |
Число элементарных проводников в |
|
одном эффективном |
n = ________ . |
Число параллельных ветвей обмотки фазы |
a = ________ . |
Номинальный диаметр проволоки обмотки: |
d = _______ |
мм. |
|
КОНТРОЛЬНЫЕ ВОПРОСЫ ДЛЯ ДОМАШНЕЙ ПОДГОТОВКИ
1. Что такое номинальные данные электрической маши-
ны?
2.Какие размеры относятся к установочно-присоедини- тельным?
3.Что такое исполнение двигателя по степени монтажа, степени защиты, климатическое исполнение?
4.Что такое патент и для чего он нужен?
5.Какие типы исполнений по степени защиты выполняют
вдвигателях серии 4А?
11
Лабораторная работа № 2
ИСПОЛЬЗОВАНИЕ МАТЕМАТИЧЕСКИХ САПР ДЛЯ ПРЕДВАРИТЕЛЬНЫХРАСЧЁТОВ ГЕОМЕТРИИ ЭЛЕКТРИЧЕСКИХ МАШИН
1. ЦЕЛЬ РАБОТЫ
Знакомство с аналитическими методиками проектирования асинхронного электродвигателя. Получение практических навыков работы в программах для математических расчётов. Закрепление навыков работы со справочной литературой.
2. ТЕОРЕТИЧЕСКИЕ ПОЯСНЕНИЯ
Современные методики проектирования новых электромеханических изделий используют моделирование разрабатываемого изделия численными методами с последующей коррекцией геометрических размеров. При таком подходе необходимо иметь первоначальную геометрию изделия. В случае, если есть аналогичное изделие, с него снимаются все геометрические размеры, по которым строят модель.
При создании изделия с нуля, т.е. оригинальных конструкций у которых нет аналогов, либо данные о конструкции этих аналогов получить невозможно, применяются аналитические расчёты геометрии.
В одних случаях такие методики есть, в других возникает необходимость эти методики создавать.
При использовании аналитических методик проектирования изделий возникает ряд трудностей:
•большое количество формул для нахождения величин;
•необходимость корректировать промежуточные коэффициенты (как следствие пересчёты далее следующих формул);
•необходимость коррекции формул с последующим пересчётом.
12
Эти трудности увеличивают время расчёта геометрии стартовой модели. Кроме этого, ручной пересчёт приводит к случайным ошибкам в расчётах и набеганию погрешностей.
Для упрощения данной стадии проектирования могут быть использованы математические САПР (системы компьютерной алгебры). Они представляют собой мощный калькулятор с возможностью записи хода решения в математической форме. Таким образом, можно всю методику проектирования в виде формул записать в документ математической САПР и, корректируя данные и формулы, добиться требуемого результата.
К математическим САПР относятся следующие програм-
мы: MathCad, MatLab, Maxima, SMath Studio, SciLab, Mathematica, Maple и другие.
Для решения подобных задач подойдут табличные процессоры (например, MS Excel, OO Calc), а также среды программирования. Использование сред программирования требует наличия соответствующих навыков.
Система компьютерной алгебры SMath Studio SMath Studio является уникальной системой для научных
и инженерных расчетов и позволяет работать с формулами, числами, текстом и графиками. С помощью SMath Studio можно решить почти любую математическую как численно, так и в символьной форме. SMath Studio позволяет записывать на экране компьютера формулы в их привычном виде.
Объединяя в одном рабочем листе текст, графику, и математические выкладки, SMath Studio облегчает понимание самых сложных вычислений. На рис. 2.1 представлен интерфейс программы SMath Studio.
Рабочее окно SMath Studio является стандартным окном Windows – приложения. Сверху располагается строка заголовка, где приводится название приложения (SMath Studio) и имя рабочего листа (документа). Ниже располагается строка меню, где все команды пакета сгруппированы по функциональному назначению. Ниже строки меню располагается панель инстру-
13
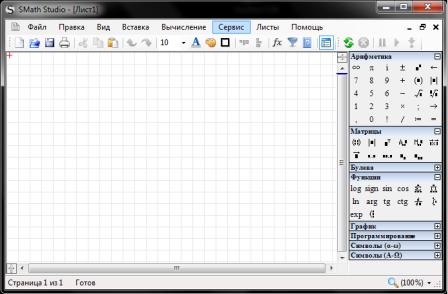
ментов – Стандартная. Панель с математическими операндами, функциями и командами располагаются с правой стороны от рабочей зоны документа. Самая нижняя строка интерфейса – строка состояния, где приводится информация о текущих режимах. Для удобства работы с большими листами имеются линейки вертикальной и горизонтальной прокрутки.
Рис. 2.1. Рабочее окно SMath Studio
3. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Используя методику проектирования асинхронных двигателей из [2], необходимо рассчитать геометрию активных частей асинхронного двигателя. Работа выполняется по вариантам, представленным в таблице 2.1, согласно заданию преподавателя.
14
Таблица 2.1
Задание по вариантам
|
1 |
подгруппа |
|
|
№ |
P2, |
n, об/мин |
h, |
|
|
кВт |
|
|
мм |
1 |
0,06 |
1500 |
50 |
|
2 |
0,12 |
1500 |
56 |
|
3 |
0,18 |
1000 |
63 |
|
4 |
1,1 |
|
3000 |
71 |
5 |
0,25 |
750 |
71 |
|
6 |
1,1 |
|
1500 |
80 |
7 |
5,5 |
|
1000 |
132 |
8 |
4 |
|
750 |
132 |
2 подгруппа
№ |
P2, |
n, об/мин |
h, |
|
кВт |
|
мм |
9 |
15 |
3000 |
160 |
10 |
15 |
1500 |
160 |
11 |
15 |
750 |
180 |
12 |
37 |
1500 |
200 |
13 |
22 |
1000 |
200 |
14 |
75 |
3000 |
250 |
15 |
75 |
1500 |
250 |
16 |
30 |
600 |
250 |
Для всех вариантов: исполнение по степени защиты IP44, по степени монтажа IM1001, климатическое исполнение IC01, номинальное фазное напряжение 220 В.
Расчёт требуется произвести в системе компьютерной алгебры: SMath Studio. По согласованию с преподавателем выбор программного продукта может быть изменён.
Ниже приведена методика, которую необходимо реализовать в системе компьютерной алгебры и добиться получения адекватного результата. Результаты, полученные в работе, сравнить с результатами лабораторной работы №1.
Прикидочный расчёт геометрии изделия
Расчёт производится для определения основных размеров активных частей машины: магнитопроводов статора и ротора, а также для получения первичных параметров обмотки двигателя.
Методика расчёта, представленная ниже – это методика, изложенная в [2] с рядом упрощений и допущений.
15
Выбор главных размеров
Число пар полюсов:
|
|
|
|
|
p = |
60 f |
, |
|
|
|
|
(2.1) |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
где f – частота перемагничивания, f = 50 Гц. |
|
|
|||||||||||||
Выбираем наружный диаметр статора Da: |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
h, мм |
50 |
56 |
63 |
71 |
|
80 |
|
132 |
160 |
|
180 |
200 |
250 |
||
Da, мм |
81 |
89 |
100 |
116 |
|
131 |
|
225 |
272 |
|
313 |
349 |
437 |
||
Внутренний диаметр статора |
|
|
|
|
|
|
|
||||||||
|
|
|
|
D =kD Da , |
|
|
|
|
(2.2) |
||||||
где kD – коэффициент, характеризующий отношение
внутреннего и наружного диаметров сердечника статора асинхронного двигателя.
2p |
2 |
4 |
|
|
|
|
6 |
8-10 |
KD |
0,52-0,57 |
0,64-0,68 |
|
|
0,70-0,72 |
0,74-0,77 |
||
Полюсное деление |
|
|
|
|
|
|
|
|
|
|
τ = |
π D |
. |
|
(2.3) |
||
|
|
|
|
2p |
|
|
||
Расчётная мощность |
|
|
|
|
|
|
||
|
|
P'= P2 |
|
kE |
, |
(2.4) |
||
|
|
|
η cosϕ |
|||||
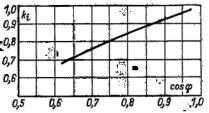
где kE – коэффициент, характеризующий отношение ЭДС
обмотки статора к номинальному напряжению по рис. 2.2., η – коэффициент полезного действия, по рис. 2.3,
16

cosφ – коэффициент мощности, по рис. 2.3. Предварительно принимаем линейную нагрузку A и
индукцию в воздушном зазоре Bδ по рис. 2.4.
Рис. 2.2. Значения коэффициента kE
Рис. 2.3. Примерные значения КПД и cos φ
а– со степенью защиты IP44 и мощностью до 30 кВт;
б– со степенью защиты IP44 и мощностью до 400 кВт
17
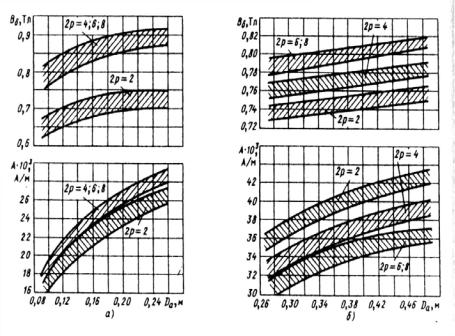
Рис. 2.4. Электромагнитные нагрузки асинхронных двигателей со степенью защиты IP44 при высоте оси вращения:
а) h ≥ 132 мм; б) h = 150…250 мм
Предварительно принимаем обмоточный коэффициент для однослойной обмотки kоб = 0,95-0,96.
Расчётная длина воздушного зазора
lδ = |
P' |
, |
(2.5) |
kB D2 Ω kоб A Bδ |
|||
где kв = 1,11 – коэффициент формы поля, |
|
||
Ω – синхронная угловая скорость ротора, |
|
||
|
Ω = 2 π n1 . |
|
(2.6) |
|
60 |
|
|
Для проверки правильности выбора главных размеров определим отношение
18

λ = |
lδ |
. |
(2.7) |
|
|||
|
τ |
|
|
Полученное значение λ находится в допустимых пределах для данной высоты оси вращения (рис. 2.5).
Рис. 2.5. Отношение λ у двигателей серии 4А.
Определение числа пазов статора, числа витков и сечения провода обмотки статора
Предельные значения зубцового деления статора
t1min и t1max по рис. 2.6.
Рис.2.6. Зубцовое деление статора двигателей серии 4А
1 – h < 90 мм; 2 – 90 < h < 250 мм; 3 – h < 280 мм Число пазов статора
Z1min |
= |
π D |
, |
(2.8) |
|
||||
|
|
t1max |
|
|
19
Z1max |
= |
π D |
. |
(2.9) |
|
||||
|
|
t1min |
|
|
Число пазов статора должно быть кратным числу фаз и число катушечных групп q должно быть целым числом. Исходя из формулы (2.3), принимаем Z1, которое должно быть кратным
2pm.
Число катушечных групп
q = |
Z1 |
. |
(2.10) |
|
|||
|
2p m |
|
|
Уточняем зубцовое деление статора
t1 = |
π D |
. |
(2.11) |
|
|||
|
Z1 |
|
|
Номинальный ток обмотки статора
I1H = |
P2 |
. |
(2.12) |
|
m UH η cosϕ |
||||
|
|
|
Принимаем предварительно число пар параллельных ветвей обмотки a = 1. Тогда предварительное число эффективных проводников в пазу
uп' = |
π D A |
. |
(2.13) |
|
I1H Z1 |
|
|
Окончательно принимаем число параллельных ветвей a и, следовательно, уточнённое значение числа эффективных проводников в пазу
uп = a uп' . |
(2.14) |
Число витков в фазе обмотки статора
w1 |
= |
uп Z1 |
. |
(2.15) |
|
||||
|
|
2a m |
|
|
|
20 |
|
|
|
Уточняем значение линейной нагрузки
A = |
2 I1H w1 m |
. |
(2.16) |
|
|||
|
π D |
|
|
Значение укорочения шага обмотки. Для однослойных обмоток укорочение не делается β = 1. В случае двухслойных
обмоток укорочение обмотки β = 23 q q+1.
Поток в воздушном зазоре
|
|
|
Фδ = |
|
kE UH |
, |
(2.17) |
|
|
|
|
4 kB w1 kоб f |
|||||
|
|
|
|
|
|
|
||
|
|
0,5 |
|
π |
|
|
|
|
где kоб |
= |
|
|
sin |
β . |
|
|
|
|
30 |
|
|
|||||
|
|
q sin |
|
2 |
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уточняем значение индукции в воздушном зазоре |
|
|||||||
|
|
|
|
|
Bδ = p Фδ . |
|
(2.18) |
|
|
|
|
|
|
|
D lδ |
|
|
Предварительно плотность тока в обмотке статора
J1 |
= |
(A J1 ) |
, |
(2.19) |
|
A |
|||||
|
|
|
|
где A J1 – произведение линейной нагрузки и плотности тока в обмотке статора по рис. 2.7.
21
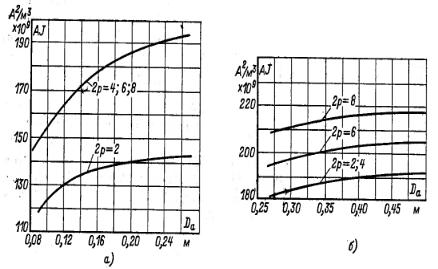
Рис. 2.7. Средние значение произведения (AJ) асинхронных двигателей
а – со степенью защиты IP44, h<= 132 мм, б – при h=160-250 мм.
Предварительное сечение эффективного проводника
qэф = |
I1H |
. |
(2.20) |
|
a J1 |
|
|
Разбиваем эффективный проводник на элементарные. Это действие производится в случае, если qэф (qэл) > 1,4 мм2.
Определяем nэл и сечение элементарного проводника
qэл = |
qэф |
. |
(2.21) |
|
|||
|
nэл |
|
|
Принимаем ближайший стандартный провод (табл. 2.2).
22
Таблица 2.2 Размеры стандартных проводов марки ПЭТВ
dгол, |
dиз, мм |
qэл, мм2 |
мм |
|
|
0,08 |
0,10 |
0,00502 |
0,09 |
0,11 |
0,00636 |
0,10 |
0,122 |
0,00785 |
0,112 |
0,134 |
0,00985 |
0,125 |
0,147 |
0,01227 |
0,14 |
0,162 |
0,01539 |
0,15 |
0,18 |
0,01767 |
0,16 |
0,19 |
0,0201 |
0,17 |
0,20 |
0,0227 |
0,18 |
0,21 |
0,0255 |
0,20 |
0,23 |
0,314 |
0,224 |
0,259 |
0,0394 |
0,25 |
0,285 |
0,0491 |
0,28 |
0,315 |
0,0616 |
0,315 |
0,350 |
0,0707 |
0,335 |
0,370 |
0,0779 |
0,355 |
0,395 |
0,0881 |
0,375 |
0,415 |
0,1104 |
0,40 |
0,44 |
0,1257 |
dгол, |
dиз, мм |
qэл, мм2 |
мм |
|
|
0,425 |
0,465 |
0,1419 |
0,45 |
0,49 |
0,1590 |
0,50 |
0,545 |
0,1963 |
0,56 |
0,615 |
0,246 |
0,60 |
0,655 |
0,283 |
0,63 |
0,69 |
0,312 |
0,71 |
0,77 |
0,396 |
0,75 |
0,815 |
0,442 |
0,80 |
0,865 |
0,503 |
0,85 |
0,915 |
0,567 |
0,90 |
0,965 |
0,636 |
0,95 |
1,015 |
0,709 |
1,00 |
1,08 |
0,785 |
1,06 |
1,14 |
0,883 |
1,12 |
1,20 |
0,985 |
1,18 |
1,26 |
1,094 |
1,25 |
1,33 |
1,227 |
1,32 |
1,405 |
1,368 |
1,40 |
1,485 |
1,539 |
Уточняем значение эффективного проводника
qэф = nэл qэл . |
(2.22) |
Уточняем плотность тока в обмотке статора
J1 = |
I1H |
. |
(2.23) |
|
|||
|
a qэф |
|
|
|
23 |
|
|
Расчёт размеров зубцовой зоны статора и воздушного зазора
Паз статора – трапецеидальный, с углом наклона клиновой части 45°.
Предварительно принимаем индукцию в зубцах статора Bz1, индукцию в ярме статора Ba1 (табл. 2.3).
Таблица 2.3 Допустимые значения индукции на разных участках
магнитопровода
Параметр |
Индекс |
Индукция на участке магнитопровода |
|||||
2p |
|
2 |
4 |
|
6 |
8 |
10 и 12 |
Ярмо статора |
Ba |
|
1,4 – 1,6 |
|
|
1,15- |
1,1-1,2 |
|
|
|
|
1,35 |
|||
|
|
|
|
|
|
|
|
Зубцы стато- |
Bz1 |
|
1,7-1,9 |
|
1,6-1,8 |
||
ра |
|
|
|||||
|
|
|
|
|
|
|
|
Ярмо ротора |
Bj |
<= |
<=1,25 |
|
<= |
<= 0,85 |
|
|
1,45 |
|
|
1,15 |
|
|
|
|
|
|
|
|
|
||
Зубцы ротора |
Bz2 |
|
|
1,75 – 1,85 |
|
|
|
Ширина зубца статора: |
Bδ t1 lδ |
|
|
bZ1 = |
, |
(2.24) |
|
|
BZ1 lδ kc |
|
|
где kc = 0,97 – коэффициент заполнения сталью магнитопровода при оксидировании листов.
Полученные размеры геометрии паза округляем до десятых долей миллиметра.
Высота ярма статора
ha = |
|
Фδ |
|
. |
(2.25) |
2 |
Ba l |
|
|||
|
δ kc |
|
|||
Принимаем высоту шлица паза статора hш, ширину шлица паза статора bш1 (по табл. 2.4 и 2.5).
24
Таблица 2.4
|
Высота шлица паза статора |
|
|
|
|||||||||||||||||||
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
hш1 |
|
|
|
|
||||
|
<= 132 мм |
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|||||||
|
>= 160 мм |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.5 |
||
Средние значения ширины шлица паза статора bш1, мм |
|||||||||||||||||||||||
h, мм |
|
|
|
|
|
|
Число полюсов 2р |
|
|
|
|||||||||||||
2 |
|
|
|
|
4 |
|
|
|
|
|
|
6-8 |
|
|
10 |
|
|
12 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
50 – 63 |
1,8 |
|
|
|
1,8 |
|
|
|
|
|
|
1,8 |
|
|
– |
|
|
– |
|||||
71 |
2,0 |
|
|
|
2,0 |
|
|
|
|
|
|
2,0 |
|
|
– |
|
|
– |
|||||
80, 90 |
3,0 |
|
|
|
3,0 |
|
|
|
|
|
|
2,7 |
|
|
– |
|
|
– |
|||||
100, 112 |
3,5 |
|
|
|
3,5 |
|
|
|
|
|
|
3,0 |
|
|
– |
|
|
– |
|||||
132 |
4,0 |
|
|
|
3,5 |
|
|
|
|
|
|
3,5 |
|
|
– |
|
|
– |
|||||
160 – 250 |
4,0 |
|
|
|
3,7 |
|
|
|
|
|
|
3,7 |
|
|
– |
|
|
– |
|||||
280 – 315 |
– |
|
|
|
|
– |
|
|
|
|
|
|
|
|
– |
|
|
|
4,0 |
|
4,0 |
||
Высота паза статора |
|
|
|
Da −D |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
hп1 |
= |
|
|
−ha . |
|
|
|
(2.26) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Ширина паза статора в нижнем основании |
|
|
|
||||||||||||||||||||
|
|
b1 = π (D + 2 hп1 )−bZ1 . |
(2.27) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Z1 |
|
|
|
|
|
|
|
|
|
|
|
|||
Ширина паза статора в верхнем основании |
|
|
|
||||||||||||||||||||
|
b2 = π (D + 2 hш1 −bш1 )− Z1 bZ1 . |
(2.28) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Z1 −π |
|
|
|
|
|
|
|
|
||||
Расстояние между основаниями паза статора |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
2 |
−b |
ш1 |
|
|
|
|
||||
|
h |
1 |
= h |
п1 |
− |
h |
ш1 |
+ |
|
|
|
. |
(2.29) |
||||||||||
|
|
|
|
2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Площадь поперечного сечения корпусной изоляции в пазу |
|||||||||||||||||||||||
|
Sиз |
= bиз (2 h1 +b1 +b2 ), |
(2.30) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
||

где |
bиз = 0,2 10−3 м |
- |
односторонняя |
толщина |
пазовой |
|||||||
изоляции. |
|
|
|
|
|
|
|
|
|
|
|
|
Площадь поперечного сечения паза для размещения |
||||||||||||
проводников |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sп' |
= b1' + b'2 |
h1' −Sиз . |
|
|
(2.31) |
|||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
Коэффициент заполнения паза статора проводниками |
||||||||||||
|
|
kз = |
d2 u |
|
n |
эл . |
|
|
|
(2.32) |
||
|
|
из |
|
п |
|
|
|
|
||||
|
|
|
|
Sп' |
|
|
|
|
|
|
||
|
|
Расчёт ротора |
|
|
|
|
||||||
Размер воздушного зазора δ, выбираем по рис. 2.8. |
|
|||||||||||
|
мм |
δ |
|
|
|
|
|
|
|
|
|
|
|
1.0 |
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2p=2 |
|
|
4 |
|
6,8 |
|
|
||
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
D |
|
|
|
00 |
|
|
|
|
|
|
|
|
|
|
|
|
50 |
100 |
150 |
|
|
200 |
250 |
мм |
|
|||
Рис. 2.8. Рекомендуемые размеры воздушного зазора |
||||||||||||
Внешний диаметр
D2 =D −2δ. |
(2.33) |
Внутренний диаметр ротора равен диаметру вала, так как сердечник непосредственно насажен на вал
Dj = Dв = kв Da , |
(2.34) |
где kв = 0,23 – коэффициент для расчета диаметра вала асинхронных двигателей по табл. 2.6.
26

|
|
|
Коэффициенты kв для расчёта диаметра |
Таблица 2.6 |
|
||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
вала асинхронных двигателей |
|
|
|
|
|
|
|||||||
|
h, мм |
|
50 – 63 |
|
71 – 250 |
|
|
280 – 355 |
|
|
|||||||
|
|
2р |
|
2 – 6 |
|
2 – 8 |
|
|
2 |
|
|
|
4 – 12 |
|
|
||
|
|
kв |
|
0,19 |
|
0,23 |
|
|
0,22 |
|
|
|
0,23 |
|
|
||
|
|
Число пазов ротора Z2 |
принимаем по табл. 2.7. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.7 |
|
||
|
|
|
Рекомендуемые соотношения чисел пазов |
|
|
|
|||||||||||
|
|
Число |
|
Число пазов |
|
|
Число |
|
|
|
|
|
|
|
|
||
2p |
|
пазов |
|
|
2p |
пазов |
|
Число пазов ротора |
|
||||||||
|
|
ротора |
|
|
|
||||||||||||
|
|
статора |
|
|
|
статора |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
12 |
|
9, 15 |
|
|
|
36 |
|
26, 46 |
|
|
|
|
|
||
|
|
18 |
|
11, 12, 15, 21, 22 |
|
6 |
54 |
|
44, 64, 66, 68 |
|
|
|
|||||
2 |
|
24 |
|
15, 17, 19, 32 |
|
|
72 |
|
56, 58, 62, 82, 84, 86, 88 |
|
|||||||
|
30 |
|
22, 38 |
|
|
|
90 |
|
74, 76, 78, 80, 100, 102, |
|
|||||||
|
|
36 |
|
26, 28, 44, 46 |
|
|
|
|
104 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
42 |
|
32, 33, 34, 50, 52 |
|
|
48 |
|
36, 44, 62, 64 |
|
|
|
|||||
|
|
48 |
|
38, 40, 56, 58 |
|
|
8 |
72 |
|
56, 58, 86, 88, 90 |
|
|
|||||
|
|
12 |
|
9 |
|
|
84 |
|
66, 70, 98, 100, 102, 104 |
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
18 |
|
10, 14 |
|
|
|
96 |
|
78, 82, 110, 112, 114 |
|
|
|||||
|
|
24 |
|
15, 16, 17 |
|
|
|
60 |
|
44, 46, 74, 76 |
|
|
|
||||
|
|
36 |
|
26, 44, 46 |
|
|
|
|
|
|
68, |
72, |
|
74, |
76, |
104, |
|
4 |
|
42 |
|
52, 54 |
|
|
10 |
90 |
|
106,108, 110, |
|
|
|
||||
|
48 |
|
34, 38, 56, 58, 62 |
|
|
|
|
112, 114 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
60 |
|
50, 52, 68, 70, 74 |
|
|
|
|
|
86,88,92,94,96,98,102, |
|
||||||
|
|
|
|
|
|
|
120 |
|
104,106,134, |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
72 |
|
62, 64, 80, 82, 86 |
|
|
|
|
|
136,138,140,142,144,146 |
|
||||||
Зубцовое деление
t2 = πZD2 .
2
Коэффициент приведения токов
ν = 2m w1 kоб .
i Z2
Ток в стержне ротора
27
(2.35)
(2.36)
I2 =ki I1Н νi , |
(2.37) |
где ki – коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1Н / I2 по рис. 2.9.
Рис. 2.9. Значение коэффициента ki Площадь поперечного сечения стержня
qc = |
I2 |
, |
(2.38) |
|
J2 |
|
|
где J2 = 3,5 106 А/м2 – плотность тока в стержне литой клетки (заливка алюминием).
Принимаем форму паза ротора, ширину шлица паза ротора b ш2, высоту шлица паза ротора hш2 по рекомендациям табл. 2.8.
Ширина зубца ротора
|
bz2 = |
Bδ t2 |
, |
|
|
(2.39) |
||
|
|
|
Bz2 kc |
|
|
|
||
где Bz2 – допустимая индукция в зубце ротора по реко- |
||||||||
мендациям табл. 2.3. |
|
|
|
|
|
|
||
|
Размеры шлица паза ротора |
Таблица 2.8 |
||||||
|
|
|
||||||
Высота |
Форма паза |
|
bш2, |
|
hш2, |
h’ш, мм |
||
оси, h |
|
|
мм |
|
мм |
2p=2 |
2p>=4 |
|
<=100 |
грушевидный по- |
|
1 |
|
|
0,5 |
- |
- |
мм |
лузакрытый |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
112-132 |
грушевидный по- |
|
1,5 |
|
|
0,75 |
- |
- |
мм |
лузакрытый |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
160-250 |
грушевидный за- |
|
1,5 |
|
|
0,5 |
1 – 1,5 |
0,3 |
мм |
крытый |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
28 |
|
|
|
|
|