

Расчет и проектирование механизмов радиоэлектронных средств. Андреев И.В
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
И. В. Андреев
РАСЧЕТ И ПРОЕКТИРОВАНИЕ МЕХАНИЗМОВ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
Учебное пособие
Допущено Учебно-методическим объединением
по образованию в области автоматики,злектроники,микроэлектроники
ирадиотехники
вкачестве учебного пособия для студентов, обучающихся по направлению 551100
испециальностям 200800 и 220500
Воронеж 2001

УДК 621.396.66
Андреев И.В. Расчет и проектирование механизмов радиоэлектронных средств: Учеб. пособие / Воронеж.гос.техн.ун-т. ВГТУ, 2001. 109 с.
Рассматриваются основы проектирования и конструирования механизмов РЭС, расчет кинематических и геометрических характеристик механизмов, их силовой расчет, выбор материалов и прочностные параметры зубчатых, фрикционных, мальтийских механизмов, анализируются программы расчетов таких передач выполненных на языке
Turbo Pascal 7.0.
Учебное пособие предназначено для студентов обучающихся по специальности 200800 “Проектирование и технология радиоэлектронных средств” при изучении курса “Прикладная механика”.
Учебное пособие изготовлено на магнитном носителе в текстовом редакторе MS Word 97.0 и содержится в файлах “механизмы РЭС.doc”.
Табл. 7. Ил. 17. Библиогр.: 12 назв.
Научный редактор – д-р физ.-мат. наук Ю.С. Балашов
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
Рецензенты: кафедра конструирования и технологии радиоэлектронных средств Владимирского государственного университета :
д-р физ.мат.наук ,профессор В.Н.Санин
Андреев И.В.,2001 Оформление. Воронежский государственный
технический университет, 2001.
Содержание
Введение |
4 |
||
1. |
Основные виды механизмов |
5 |
|
2. |
Кинематический расчет механизмов |
10 |
|
3. |
Расчет геометрии передачи и ее деталей |
16 |
|
|
3.1 |
Фрикционные передачи |
16 |
|
3.2 |
Геометрия цилиндрической зубчатой передачи |
18 |
|
3.3 |
Конические зубчатые передачи |
22 |
|
3.4 |
Геометрия червячной передачи |
23 |
|
3.5 |
Передача винт-гайка |
26 |
|
3.6 |
Мальтийские механизмы |
29 |
4. |
Силовой расчет механизмов |
31 |
|
5. |
Расчет зацеплений на прочность |
38 |
|
5.1Прочностные расчеты фрикционных передач
|
и мальтийских механизмов |
38 |
5.2 |
Износостойкость механизма винт-гайка |
40 |
5.3 Расчет на прочность цилиндрических |
|
|
|
и конических зубчатых передач |
41 |
5.4 Расчет на прочность червячных передач |
48 |
|
6. Расчет прочности одного из валов |
51 |
|
7. Выбор конструкционных материалов |
54 |
|
8. Основы конструирования отдельных деталей передач |
|
|
зацеплением и программы расчета |
55 |
|
8.1 |
Конструирование зубчатых колес |
55 |
8.2 |
Проектирование червяков и червячных колес |
59 |
8.3 |
Конструирование деталей фрикционных передач |
61 |
8.4 |
Типовые конструкции корпусных деталей |
65 |
8.5 |
Программы расчета |
69 |
Заключение |
107 |
|
Список литературы |
108 |
|
ВВЕДЕНИЕ
При проектировании механизмов РЭС производится анализ различных типов передач: зубчатых и червячных, фрикционных
сжесткой и гибкой связью, планетарных и волновых передач, а также рассматриваются различные типы исполнительных механизмов: рычажные, кулачковые и механизмы прерывистого движения: секторная зубчатая передача, мальтийский крест и храповый механизм. Исходя из функциональных особенностей работы РЭС все механизмы можно объединить в следующие группы: механизмы привода антенн; механизмы дистанционных передач; отсчетные механизмы; механизмы следящих систем; передачи ручной настройки; механизмы перемещения носителей информации в устройствах магнитофонов и видеомагнитофонов; механизмы электромеханической настройки.
Механизмы каждой группы имеют свои особенности как с точки зрения конструкции, так и передаваемых нагрузок и характера движения. Так, например, лентопротяжный механизм современного кассетного магнитофона включает несколько зубчатых передач и фрикционных механизмов с гибкой связью, состоящих из нескольких цилиндрических дисков, приводящихся во вращение гибкой связью, представляющей плоский или круглый ремень. Конструкции приводов современных CD-ROM персональных компьютеров содержат несколько различных зубчатых механизмов: прямозубых и реечных передач, задающих определенную скорость вращения диска и возможность установки его в персональный компьютер. Проектирование таких передач невозможно без расчета геометрии и динамических характеристик механизмов, а правильный выбор материалов и определение силовых нагрузок
срасчетом зацепления на прочность определяет их конкурентоспособность и технологичность.

1. ОСНОВНЫЕ ВИДЫ МЕХАНИЗМОВ
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и механизмы прерывистого движения. Рычажными называют механизмы с геометрическим замыканием звеньев во вращательных и поступательных парах /1/. К рычажным механизмам относятся кривошипно-ползунный, кулисный, синусный, тангенсный, и пространственно-сферический (рис.1).
Рис.1. Виды рычажных механизмов
Кривошипно-ползунный механизм, используемый для преобразования
|
A |
|
|
|
|
|
|
|
|
2 |
l1 |
|
|
|
4 |
|
|
|
|
|
|
r |
|
|
||
1 |
|
|
|
|
3 |
|
||
|
|
3 |
|
|
|
|||
r |
|
|
O' |
|
|
|||
|
|
|
|
|
|
|
||
O |
|
|
l0 |
|
|
|
2 |
4 |
|
|
|
|
|
B |
|||
|
|
|
1 |
|
|
|||
|
|
|
|
|
l |
|
||
|
|
|
|
|
|
|
||
|
|
O1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
B |
|
|
|
1 |
|
|
O' |
|
3 |
O |
|
|
O |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
а) 1 |
|
|
|
б)O' |
|
O'' |
в) |
|
r |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
г) |
|
|
д) |
|
|
|
|
вращательного движения кривошипа 1 (рис. 1.а) в возвратно-поступательное движение ползуна 3. Ползун и кривошип соединяются с помощью звена 2, а сам ползун 3 совершает движение и оказывает давление на неподвижное звено 4. Кривошипно-кулисный механизм состоит из кривошипа 1 (рис. 1.б) и кулисы 3, представляющей собой подвижное направляющее звено, и звено
2, называемое кулисным камнем. Если l r , то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3.
Когда l r , то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью. Для синусного механизма (рис. 1.в) при вращении кривошипа 1, точка А кривошипа двигается по окружности радиусом r . Ползун 4 синусного механизма шарнирно соединен с кривошипом и может перемещаться по направляющей звена 2,
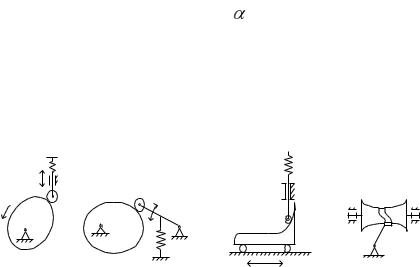
которое в свою очередь, двигается в неподвижной прямолинейной направляющей 3. Любая точка звена 2 совершает возвратно-прямолинейное движение. Для тангенсного механизма (Рис. 1.г) при движении кривошипа 1 ползун 2 совершает возвратно-поступательное движение. Пространственносферический механизм (рис. 1.д) служит для передачи движения между пересекающимися осями под углом , часто называемый карданной передачей.
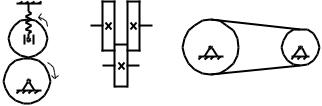
Кулачковые механизмы образуются путем силового замыкания звеньев кулачка 1 и толкателя (коромысла) 2.
Кулачок обычно представляет собой диск или цилиндр, профиль которого очерчен определенной кривой, которая строго задает движение толкателю (рис. 2).
|
2 |
|
|
|
1 |
|
|
|
2 |
|
2 |
|
1 |
1 |
1 |
|
|
||
|
|
|
2 |
а) |
б) |
в) |
г) |
Рис.2. Кулачковые механизмы
Взависимости от вида движения соединенное с кулачком звено называют толкателем (рис. 2 б,г). Механизмы используют для преобразования вращательного (рис. 2.б) или возвратно-поступательного движения (рис. 2.в) входного звена в возвратно-поступательное (рис. 2 а,в), угловое перемещение (рис 2.б) или для движения по сложной пространственной траектории (рис. 2.г) выходного звена.
Вфрикционных механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев. Различают фрикционные передачи с жесткой связью (рис 3 а,б) и с гибкими связями (рис. 3.в).
|
1 |
1 |
|
|
|
|
1 |
3 |
2 |
|
|
|
|
|
|
O' |
O1 |
|
O2 |
|
|
|
||
|
O' |
2 |
|
|
|
|
|
|
|
а) |
б) |
|
в) |
|
Рис. 3. Фрикционные механизмы
Простейшая фрикционная передача состоит из двух цилиндрических дисков 1 и 2 (рис. 3.а), один из которых прижимается к другому силой упругости пружины, либо из трех дисков с торцевым зацеплением одного из них (рис. 2.б). Фрикционный механизм может быть выполнен и с гибкой связью (рис. 3.г) для передачи вращательного движения от одного диска к другому, находящемуся на большом расстоянии. Под гибкой связью понимают прямоугольные, клиновидные и круглые ремни, тросы, нити и ленты.
Зубчатыми называют механизмы, образованные зацеплением выступов или зубов, а передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга. В отличии от фрикционной передачи здесь исключено проскакивание звеньев.
Зубчатые механизмы состоят из двух колес (рис. 4.а) обеспечивающих внешнее зацепление или из двух колес 1 и 2 и дополнительного звена 3, получившего название водила (рис. 4.б), обеспечивающего планетарное движение колеса-сателлита 2. Передача, представленная на рис. 4.а, представляет простую зубчатую передачу, а на рис. 4.б – планарную. Возможны зубчатые механизмы с внутренним зацеплением колес и планетарные передачи, содержащие до трех колес-сателлитов. Планетарную передачу с гибким сателлитом называют волновой и движение в такой передаче передается за счет «бегущей волны» деформации гибкого колеса. К механизмам

прерывистого движения относятся, мальтийский механизм, секторная зубчатая передача и храповой механизм.
:
1 1 A
A |
2 |
|
2
3
а) |
б) |
в) |
Рис. 4. Зубчатые механизмы (а, б) и вид зацепления (в) двух колес
Мальтийские механизмы используют для преобразования непрерывного вращательного движения во вращательное движение с остановками. Такой механизм состоит из мальтийского креста 1 (рис. 5.а) и кривошипа 3 с цевкой 2 и фиксатором 4, где ведущим звеном является кривошип с цевкой. Секторная зубчатая передача состоит ведущего неполнозубого 1 и ведомого полнозубого колеса 2 (рис. 5.б).
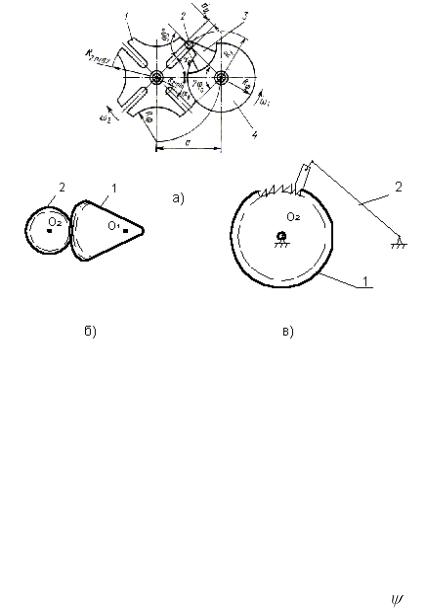
Рис. 5. Механизмы прерывистого движения
Храповые механизмы (рис. 5.в) используют для преобразования вращательного движения во вращательное движение с остановками ведомого звена. Возможно также преобразование возвратно-поступательного движения во вращательное с остановками.
2. КИНЕМАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМОВ
Аналитические методы исследования кинематики механизмов позволяет определить функциональные зависимости между параметрами движения входных и выходных звеньев. Кинематический расчет включает определение функции положения и передаточных характеристик механизма.
Функцией положения называют зависимость между координатами |
и q |
соответственно входного и выходного звеньев.

(q) |
(1) |
Функция положения – математическое |
выражение |
геометрических связей в механизме, обусловливающих определенное преобразование движения. Дифференцируя выражение (1) получаем скорость и ускорение выходных звеньев
|
t |
q |
qt |
|
|
|
|
(2) |
||
t |
q |
(q |
)2 |
q |
q |
t |
|
|
|
(3) |
t |
|
|
|
|
|
|
||||
Входящие в выражения (2) и (3) производные |
q |
и |
q |
называются |
||||||
|
|
|
|
|
|
|
|
|
||
первой и второй передаточными функциями или аналогами скорости и ускорения. Они как и функция положения (1) выражают только структурные и геометрические связи механизма, т.е. зависят от положения входного звена. Рассмотрим функции положения отдельных механизмов и их передаточные
характеристики q и q . Для кулачкового механизма |
с качающим |
|||||
толкателем (рис. 2.б) функция положения равна |
|
|||||
|
|
|
A sin2 |
, |
(4) |
|
где q |
- угол поворота, равный |
t , |
A - постоянная. |
|
||
|
Передаточные функции равны |
|
|
|
||
|
q |
2A sin cos |
A sin2 |
(5) |
||
|
|
|
|
|
|
|
|
|
q |
2A cos2 |
|
(6) |
|
|
|
|
|
|
|
|
|
Для синусного механизма кинематические характеристики |
|||||
имеют вид: |
|
|
|
|
|
|
|
|
|
(q) |
sin |
|
(7) |