

2378
.pdfтования, изменяющимся от 0,5 до 5 с.
Предположим также, что матрицы, описывающие систему, А, В, С, R1, R12, R2, Q1, Q12 и Q2 помещены в файл с именем CSYS, а параметром, который необходимо определить в результате процедуры проектирования, является элемент 3,3 матрицы Q1. При работе с пакетом используется следующая процедура (номера строк указаны только для удобства описания алгоритма):
1:MACRO DESIGN ALPHA
2:ALTER Ql 3 3 ALPHA
3:FOR H=0.5 TO 5 STEP 0.5
4:SAMP DSYS CSYS H
5: |
TRANS Q DSYS |
CSYS H |
6: |
TRANS R DSYS |
CSYS H |
7:OPTFB L DSYS
8:KALFI K DSYS
9: |
CONNECT CLSYS DSYS К L |
10:SIMU Y X CLSYS UREF
11:PLOT X(l) X(7) X(8) XE(1) U
12:NEXT H
13:END {MACRO}
В первой строке определена макропроцедура DESIGN с параметром ALPHA. Макроопределение закапчивается в строке 13. Элемент 3,3 матрицы Q1 определен в строке 2 как параметр ALPHA. В строке 3 организован цикл для повторения всех команд с 4-й строки до 12-й для периода квантования от 0,5 до 5 с. с шагом 0,5 с. Команды строк 4-6 преобразуют в дискретную форму описание системы, критерий оптимальности и ковариационные матрицы. В строке 7 вычисляется матрица оптимальной обратной связи L, а в строке. 8 - коэффициент усиления фильтра Калмана. Команда строки 9 объединяет систему, фильтр Калмана и обратную связь по переменным состояния. В строке 10 моделируется замкнутая система при входном сигнале UREF. Команда строки 11 выводит графики переменных состояния с номерами 1, 7 и 8, оценку первой переменной состояния сигнала управления.
Диалог для использования макросредств показан на следующем примере.
EDIT FILE CSYS INPUT UREF STEP DESIGN 3
DESIGN 8
Вначале подготавливают файл с описанием системы. Затем переменная STEP определяется как сигнал управления и процедура проектирования повторяется для параметров 3 и 8.
POLPAC. Пакет POLPAC ориентирован на анализ многосвязных систем и позволяет синтезировать систему по размещению полюсов и стратегию управления для стандартной ЛКГ-задачи. Пакет включает в себя также классические методы, использующие корневые годографы и логарифмические частотные характеристики, для которых применяется машинная графика.
Для некоторых задач интерактивные процедуры неосуществимы. Это типич-
83
но для проектирования больших систем, когда время, требуемое на вычисления, так велико, что нет смысла ждать появления результатов расчетов на экране терминала.
LISPID. Для идентификации больших систем целесообразно использовать пакетный режим и программу, в которой предусмотрены интерактивное начало и интерактивная процедура анализа результатов. LISPID является примером такой программы. Программа позволяет оценивать параметры для линейных стохастических систем с произвольными параметрами и для некоторых типов нелинейных систем.
DYMOLA. Другой трудностью при работе с большими системами является их моделирование. Можно непосредственно записать уравнения системы и проверить ее устойчивость, однако предпочтительнее уменьшить количество уравнений
ипредставить их в форме, более удобной для моделирования. Язык DYMOLA предусматривает достаточно простое описание больших иерархических систем. На этом языке разработано программное обеспечение, которое оперирует с линеаризованными уравнениями системы и использует программы моделирования пакета
SIMNON.
Пакеты DIGICON и CONCON предназначены для автоматизированного проектирования цифровых непрерывных одномерных систем управления. В них реализован метод синтеза по заданному расположению полюсов с помощью обратной связи по состоянию, для оценки неизмеряемых состояний использован наблюдатель состояния. Синтезированная система оценивается по реакции на ступенчатую единичную функцию. Пакет DOPTICON посвящен проектированию дискретной оптимальной системы в соответствии с задачей ЛКГ, в нем реализован алгоритм декомпозиции собственных векторов. Все пакеты содержат алгоритмы для вычисления полюсов, нулей и переходных характеристик синтезированной системы.
Пакет LSAP (Linear System Analysis) предназначен для анализа и синтеза систем управления с обратной связью. Используя интерактивную машинную графику, пользователь может построить корневой годограф, частотныеили временные характеристики, как для непрерывных, так и для импульсных систем. Параметры и структуру системы можно легко изменить, что существенно упрощает проектирование корректирующих устройств и анализ чувствительности.
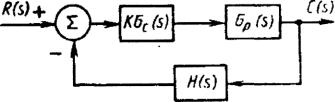
Восновном программа применяется для анализа непрерывных и импульсных систем управления с обратной связью, структура которых представлена на рис.5.2
и5.3. Однако возможности программы не ограничены системами с одним входом
ивыходом и позволяют рассматривать более сложные структуры, чем представленные на рисунках.
Рис. 5.2. Непрерывная система с обратной связью:
C(s), R(s) - изображения соответственно выходного сигнала и входного воздействия;
84
Gc(s), Gp(s), H(s) - передаточные функции соответственного корректора, объекта и обратной связи; К - коэффициент усиления
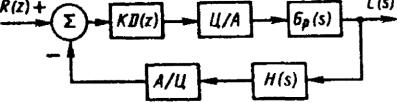
Рис. 5.3 Импульсная система с обратной связью:
А/Ц - АЦП; Ц/А - ЦАП; C(s), R(z) - изображения соответственно выходного сигнала и входного воздействия; D(z), Gp(s), H(s) - передаточные функции соответственно цифрового корректора, объекта и обратной связи; К - коэффициент усиления
Пакет FREDOM (FREquency-DOMain) предназначен для автоматизированного проектирования в частотной области одномерных (с одним входом и одним выходом) систем, описываемых двумя передаточными функциями:
1) передаточной функцией прямой цепи
Af(s) sm+am-1sm-1+…+a1s+a0 G(s)= ---- = -----------------------
Bf(s) sn+bn-1sn-1+…+b1s+b0
2) передаточной функцией обратной связи
Cf(s) sp+cp-1sp-1+…+c1s+c0 H(s)= ---- = -----------------------
Df(s) sq+dq-1sq-1+…+d1s+d0
Для дискретных систем эти передаточные функции могут быть записаны через соответствующие z-преобразования:
Af(z) zm+am-1zm-1+…+a1z+a0 G(s)= ---- = -----------------------
Bf(z) zn+bn-1zn-1+…+b1z+b0
Cf(z) zp+cp-1zp-1+…+c1z+c0 H(s)= ---- = -----------------------
Df(z) zq+dq-1zq-1+…+d1z+d0
где m <= n и р <= q. He теряя общности, предположим, что
am = bn = cр = dq = 1,
поскольку любой из этих коэффициентов может быть нормализован.
85
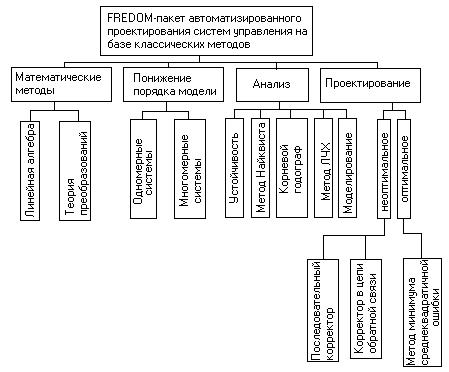
Рис. 5.4. Структура пакета FREDOM/PC
Пакет автоматизированного проектирования во временной области TIMDOM (TIMe-DOMain) предназначен для многомерных линейных систем, описываемых в пространстве состояний в канонической форме
x=Ax+Bux(0)=x0;
y=Cx+Du,
где А - матрица системы размерностью n х n; В - матрица входа размерностью n х m; С - матрица выхода размерностью r х n; D - матрица обхода размерностью г х m, а х, u и у- векторы состояния, управления и выхода соответствующих размерностей; x0 - начальное состояние.
86
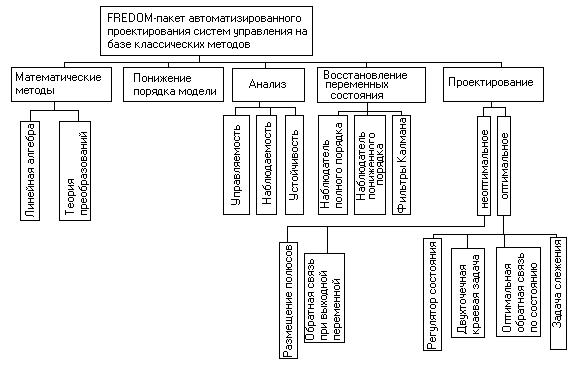
Рис. 5.5 Структура пакета TIMDOM/PC
Пакет автоматизированного проектирования LSSPAK предназначен для построения моделей больших линейных систем и синтеза алгоритмов управления.
Рассмотрим линейную стационарную систему, описываемую уравнением
х=Ах+Ви, х(t0)=х0,
где х - n-мерный вектор состояния; u - m-мерный вектор управления; А и В - матрицы соответствующих размерностей. Предполагается, что система может быть представлена совокупностью N подсистем следующего вида:
xi=Aixi+Biui+∑Gijxi, xi(t0)=x0i
для i = 1,..., N, где Аi, Вi и Сij - матрицы с размерностями ni х ni, ni х mi и ni х nj соответственно. Суммирующий член в уравнении описывает взаимодействие i-й
подсистемы с остальными (N - 1). Эта форма математического описания соответствует одному из возможных определений большой системы:
«Система считается большой, если в результате декомпозиции она может быть разбита на ряд подсистем».
В качестве еще одного описания большой системы может выступать так называемая «децентрализованная» форма
х=Ах+∑Biui, x(t0)=x0,
в соответствии с которой управление системой распределяется между N локальными децентрализованными регуляторами, функционирующими совместно.
87
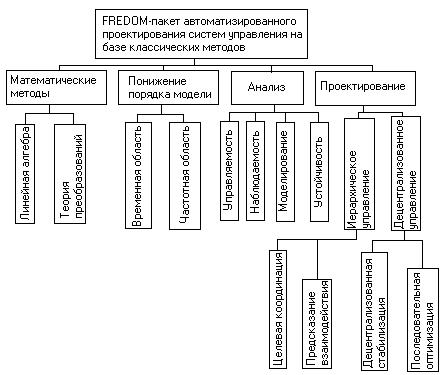
Рис.5.6. Структура пакета LSSPAK/PC
Интерактивный пакет проектирования оптимальных многомерных систем управления DELIGHT. MIMO.
Вычислительная система DELIGHT предназначена для инженерного проектирования во многих областях на основе методов оптимизации. Она включает в себя язык высокого уровня RATTLE, который упрощает программирование прикладных задач; программы численного анализа на языке ФОРТРАН; построенную по модульному принципу библиотеку методов оптимизации RATTLE; чрезвычайно гибкие графические средства, в системе предусмотрена возможность развитого диалога с пользователем. Рассматриваемый пакет проектирования многомерных систем управления DELIGHT. MIMO включает в себя, кроме системы DELIGHT, программы для описания систем управления, вычисления их характеристик и графического представления результатов. Это позволяет проектировщику использовать в интерактивном режиме как методы синтеза многомерных систем, так и алгоритмы полуопределенной оптимизации.
Автоматизированный пакет для анализа и проектирования систем управле-
ния KEDDC,
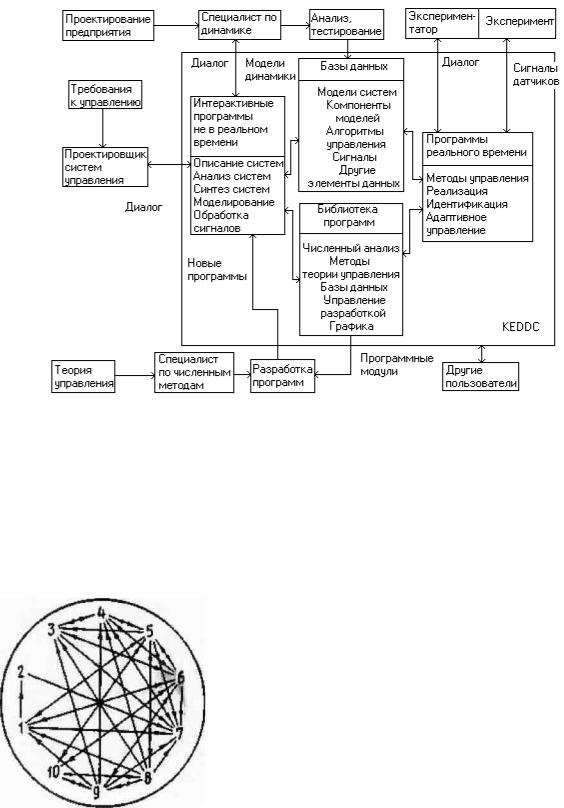
На рис.5.6 показана структура пакета KEDDC и его связь с разработчиками и задачами. Главными компонентами системы являются: набор интерактивных программ для анализа систем и сигналов, база данных, обширная библиотека программ и программы реального времени, связанные с экспериментальным оборудованием. Доступ к общей базе данных улучшает взаимодействие между группами, занятыми в одной разработке. Доступ всех пользователей к процедурам моделирования и проектирования может улучшить взаимодействие между системными аналитиками и инженерами по управлению. Пакет также формирует общую базу программного обеспечения, что уменьшает дублирование в разработке программ. Пакет организован как открытая система, состав которой в любое время может быть
88
расширен, изменен или сокращен. Неограниченная расширяемость особенно важна для прикладных исследований и разработок, требующих применения новых методов и программ. Разработка программ поддерживается библиотекой, которая содержит около 1000 процедур. Использование существующих программ реального времени позволяет проводить проверку алгоритмов управления, идентификацию в режиме «on-line» и адаптивное управление.
Рис. 5.7 Основные компоненты пакета KEDDC и взаимодействие с разработчиками
Пакет обеспечивает большой набор операций для описания и анализа систем, синтеза, моделирования и обработки сигналов. Системы могут быть описаны любым из десяти способов (рис 5.7), причем легко может быть
Рис. 5.8 Модели для описания систем и их преобразование:
1 - последовательность детерминированных или стохастических входных и (или) выходных сигналов; 2 - последовательность значений автокорреляционных или взаимных корреляционных функций; 3 — дискретные значения импульсной переходной функции; 4 — дискретные значения переходной функции; 5 - передаточная функция (матрица) в s-области; 6 - передаточная функция (матрица) в z-области; 7 — дискретные значения частотных характеристик (спектр); 8 — матрицы непрерывной модели в пространстве
состояний; 9 — матрицы дискретной модели в пространстве состояний; 10 — полиноминальные матрицы описания систем матричными дробями осуществлен пе-
89
реход между моделями во временной области, в пространстве состояний и в частотной области. Выбор описания системы включает в себя определение детерминированных и стохастических входных и выходных сигналов, непрерывных и дискретных передаточных матриц, непрерывных и дискретных моделей в пространстве состояний, матричных дробей. Для преобразования моделей систем и процедур проектирования регуляторов обычно используют численные методы, обеспечивающие эффективное и точное решение сложных задач.
Пакет автоматизированного проектирования систем управления и построения моделей MATRIXx.
Пакет MATRIXx предоставляет пользователю широкий диапазон возможностей, в нем применяются единые форматы данных и файлов. Все рутинные расчеты выполняет ЭВМ, что позволяет пользователю уделить больше внимания результатам проектирования. Графические возможности пакета обеспечивают быстрое представление информации.
Впакете MATRIXx представлены классические и современные методы проектирования и идентификации систем управления. Это дает возможность инженеру использовать те методы, которые в наибольшей степени соответствуют его задаче. Как показывает опыт, пользователи широко применяют самые различные методы, что объясняется легкостью работы с ними. Поклонники «современной» школы стремятся использовать некоторые «классические» методы и наоборот, что само по себе положительно сказывается на качестве разработок.
Пакет MATRIXx создан на основе надежных вычислительных алгоритмов пакетов UNPACK и EISPACK; в нем также использованы последние достижения в области численного анализа. Для систем высокого порядка особенно важны численная устойчивость и робастность алгоритмов. В программном обеспечении па-
кета MATRIXx предусмотрена всесторонняя проверка и корректировка численной обусловленности, что позволяет использовать его для исследования больших систем.
Команды пакета имеют простой и естественный синтаксис, кроме того, из них можно создавать сложные иерархические структуры. Собственный редактор позволяет корректировать последнюю командную строку. Возможность использования команды HELP, обширная диагностика и разумное применение стандартных
операций облегчает работу с пакетом MATRIXx. Достаточный для работы с пакетом уровень знаний может быть достигнут за несколько дней.
Враспоряжении пользователя имеются гибкие средства для расширения возможностей командного языка. Функции могут быть записаны в виде последовательности команд с перемещаемыми локальными переменными и параметрами. В том случае, когда требуется высокое быстродействие, новые функции можно вводить также и на языке ФОРТРАН.
90
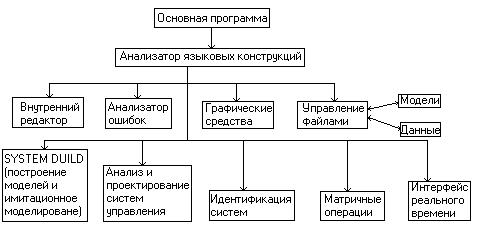
Рис. 5.9 Архитектура программного обеспечения пакета MATRIXx
Возможности пакета можно сгруппировать следующим образом:
1)матричные, векторные и скалярные операции;
2)представление графической информации;
3)проектирование систем управления;
4)идентификация систем и обработка сигналов;
5)интерактивное построение моделей (SYSTEM BUILD);
6)моделирование и оценка характеристик.
На рис. 5.9. представлена структура пакета MATRIXx.
Опыт использования пакетов
Разработанные пакеты нашли применение в университетах и в промышленности. Диалог с пользователями на начальном этапе использования пакетов оказал положительное влияние на их совершенствование, пользователи определили многие конкретные области применения этих программ.
Пакеты используются сотрудниками университета, студентами и аспирантами для решения конкретных задач по проектированию систем управления. Использование пакетов делает возможным концентрировать на лекциях внимание студентов на концепциях и идеях теории управления, рассматривая задачи и детали на практических занятиях.
В качестве стандартного языка документирования используется язык моделирования SIMNON. В составе соответствующего пакета широко используется библиотека реальных моделей различной сложности, что удобно как при обучении, так и в практической работе. Работа является учебником с конкретными примерами моделирования, которые студенты могут проверить при непосредственной работе на терминалах.
Пакет IDPAC используется как хорошее средство для идентификации систем. Он дает возможность студентам работать с реальными данными, решать производственные задачи.
Для изучения ЛКГ-задач с успехом применяется пакет SYNPAC, Пакет был применен при проектировании цифровых систем управления для летательных аппаратов, алгоритмы управления которых затем прошли натурные испытания. При разработке алгоритмов управления для нового шведского военного самолета также
91
был использован этот пакет.
Пакеты используются на многих промышленных фирмах, что увеличило эффективность инженерного труда. Типичным является сокращение сроков разработки с четырех человеко-месяцев до четырех человеко-недель, что объясняется прежде всего сокращением посредников-программистов между инженером и ЭВМ. Увеличилось число разработок и их вариантов, анализ которых требует малых затрат времени и позволяет использовать те же процедуры моделирования с измененными параметрами. Еще одним фактором повышения эффективности труда явилась машинная обработка документации.
Пакет MATHLAB
Первая версия системы MATLAB была написана в университете НьюМексико и Станфордском университете в конце 70-х годов и была предназначена для преподавания курсов теории матриц, линейной алгебры и численного анализа.MATLAB 5 - это высокоэффективный язык инженерных и научных вычислений. Он поддерживает математические вычисления, визуализацию научной графики и программирование с использованием легко осваиваемого операционного окружения, когда задачи и их решения могут быть представлены в нотации, близкой к математической. Наиболее известные области применения системы
MATLAB:
-математика и вычисления;
-разработка алгоритмов;
-вычислительный эксперимент, имитационное моделирование, макетирование;
-анализ данных, исследование и визуализация результатов;
-научная и инженерная графика;
-разработка приложений, включая графический интерфейс пользователя.
MATLAB - это интерактивная система, основным объектом которой является массив, для которого не требуется указывать размерность явно. Это позволяет решать многие вычислительные задачи, связанные с векторно-матричными формулировками, существенно сокращая время, которое понадобилось бы для программирования на скалярных языках типа С или Fortran.
MATLAB 5 содержит существенные изменения и улучшения в каждом разделе, начиная от встроенных математических функций и новых конструкций программирования и заканчивая новыми структурами данных, объектноориентированным программированием, новыми средствами визуализации и графическим интерфейсом пользователя (GUI).
Операционная среда системы MATLAB 5 - это множество интерфейсов, которые поддерживают связь этой системы с внешним миром. Это диалог с пользователем через командную строку или графический интерфейс, просмотр рабочей области и путей доступа, редактор и отладчик М-файлов, работа с файлами и оболочкой DOS, экспорт и импорт данных, интерактивный доступ к справочной информации, динамическое взаимодействие с внешними системами Microsoft Word, Microsoft Excel и др.
92