2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfстроится из единичной |
матрицы |
1 размером |
z2 × z2 |
|
|
|
|
|
Элементы векторов UE и II оказываются изначально |
|||||||||||||||||||||||||||||||||
и матрицы C1zz, которая как и матрица C1zy из (2) явля- |
заданными, а структуры матриц GC, GL и GR имеют вид |
|||||||||||||||||||||||||||||||||||||||||
ется подматрицей матрицы С1, имеющей вид |
|
|
|
|
|
|
|
|
|
|
GC |
= [GCE |
|
GCC |
|
|
GCR |
GCL |
|
GCI ] , |
|
|
|
|||||||||||||||||||
|
|
С1yy |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(13) |
||||||||||||||||||||
|
|
|
, |
|
(8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
С1 = |
|
|
|
|
|
|
|
|
|
|
|
|
GL |
= [GLE |
|
GLC |
|
|
GLR |
GLL |
|
GLI ] , |
|
|
|
|
||||||||||||||||
|
|
С1zy |
С1zz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(14) |
||||||||||||||||||||
где C1yy соответствует y-ветвям дерева, которые входят в |
|
|
|
|
|
|
|
|
GR |
= [GRE |
|
GRC |
|
|
GRR |
GRL |
|
GRI ] . |
|
|
(15) |
|||||||||||||||||||||
состав контуров, построенных от y-связей графа (y2 × y1); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
C1zy соответствует |
y-ветвям |
дерева, которые |
входят |
При этом размеры матриц GAB вычисляются как nA × nB, |
||||||||||||||||||||||||||||||||||||||
в контуры, образованные z-связями (z2 × y1); C1zz соответ- |
где A = E, C, R, L, I; В = E, C, R, L, I. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
ствует z-ветвям дерева, которые входят в контуры, обра- |
|
|
|
|
|
С учетом этого система уравнений (1) распадается |
||||||||||||||||||||||||||||||||||||
зованные z-связями (z2 × z1). |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
на три подсистемы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
В свою очередь матрица C1 может быть построена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
исходя из равенства |
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
−G |
|
|
U |
|
− Re(G |
|
|
) |
U |
|
|
− |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
UC |
= Im |
(GCC ) −1 |
|
|
CE |
|
|
E |
|
|
|
|
CC |
|
|
|
C |
|
, |
||||||||||||
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
C1 = D2 . |
|
|
|
(9) |
|
|
dt |
|
|
|
|
−GCRIR − |
Re(GCL ) IL − GCI II |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Матрица проводимостей y-ветвей дерева графа Yy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
размером (y1 + y2) × (y1 + y2) |
и матрица сопротивлений |
|
|
|
|
|
|
|
|
|
|
|
|
−G |
|
|
U |
|
|
− |
Re(G |
|
|
) U |
|
|
|
− |
|
|||||||||||||
z-ветвей графа Zz размером (z1 + z2) × (z1+z2) из (2) вхо- |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
IL |
= Im(GLL ) |
−1 |
|
|
|
LE |
|
|
E |
|
|
|
LC |
|
|
C |
|
|
, |
||||||||||||||||||||
дят в качестве подматриц в матрицу номиналов V, кото- |
|
|
|
|
|
|
−GLR IR − Re(GLL ) |
IL − GLI II |
||||||||||||||||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
рая после ряда перестановок столбцов и строк имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
V = |
Yy |
0 |
|
|
(10) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 |
Zz |
|
|
|
|
|
|
|
GRR IR = −GRE UE − GRC |
|
|
|
UC − GRL |
|
|
IL − GRI II , |
(18) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt |
dt |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Номиналы могут иметь неизменное значение или пе- |
где Im – функция, возвращающая мнимые части эле- |
|||||||||||||||||||||||||||||||||||||||||
ресчитываться на каждой итерации по заданному алго- |
||||||||||||||||||||||||||||||||||||||||||
ритму, в частности, в функции времени или интегрируе- |
ментов матриц; Re – функция, возвращающая вещест- |
|||||||||||||||||||||||||||||||||||||||||
мых величин. |
|
|
|
|
|
|
|
|
венные части элементов матриц; элементы векторов |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
UE , UC ,IR ,IL ,II , |
а |
|
|
также |
|
элементы |
|
|
векторов |
|||||||||||||||||||||||||
Матрица (2) имеет структуру |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
d |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
G = [GE |
|
|
|
|
|
T |
|
|
|
UC , |
IL в (18) численно равны значениям, рассчи- |
|||||||||||||||||||||||||||||||
|
GC |
GR |
GL |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
GI ] , |
|
(11) |
|
dt |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
танным на предыдущей итерации интегрирования. |
|
||||||||||||||||||||||||||||||||
где GE соответствует уравнениям для ветвей с источни- |
|
|
|
|
|
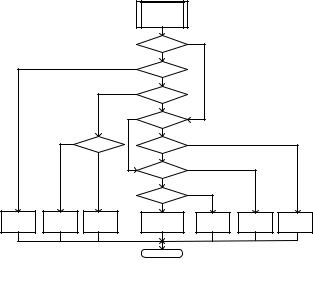
Формирование систем уравнений (16)–(18) осущест- |
||||||||||||||||||||||||||||||||||||
ками ЭДС (nE × N); GС – для ветвей с емкостями (nC × N); |
вляется автоматически. Системы уравнений (16) и (17) |
|||||||||||||||||||||||||||||||||||||||||
GR – для ветвей с сопротивлениями (nR × N); GL – для |
решаются методом Эйлера или Рунге – Кутта с постоян- |
|||||||||||||||||||||||||||||||||||||||||
ветвей с индуктивностями (nL × N); GI – для ветвей с ис- |
ным шагом интегрирования dt. Система уравнений (18) |
|||||||||||||||||||||||||||||||||||||||||
точниками тока (nI × N); nE, nC, nR, nL, nI – соответственно |
решается на каждом шаге итераций. После расчета век- |
|||||||||||||||||||||||||||||||||||||||||
количество уравнений для ветвей с источниками ЭДС, |
тора неизвестных X в (1) для t-й итерации результаты |
|||||||||||||||||||||||||||||||||||||||||
емкостями, сопротивлениями, индуктивностями и ис- |
распространяются на всю электрическую цепь, т.е. рас- |
|||||||||||||||||||||||||||||||||||||||||
точниками тока; N – общее количество уравнений. |
|
считываются токи во всех ветвях и потенциалы во всех |
||||||||||||||||||||||||||||||||||||||||
Вектор искомых величин в (1) имеет структуру |
узлах электрической цепи. По результатам расчета на |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
каждом шаге итераций пересчитываются элементы мат- |
|||||||||||||||||||||||||||||||||
X = [UE |
UC |
IR |
IL |
II ]T , |
|
(12) |
рицы номиналов V. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
где UC – вектор напряжений на источниках ЭДС, со- |
|
|
|
|
|
|
|
|
III. ВИРТУАЛЬНЫЙ ЛАБОРАТОРНЫЙ |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ПРАКТИКУМ ПО ЭЛЕКТРОПРИВОДУ |
|
|
|
|
|
|||||||||||||||||||||||||||||
держащий nE элементов |
по |
числу |
источников |
ЭДС; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
На лабораторных работах по курсу «Электропривод» |
|||||||||||||||||||||||||||||||||||||
UC – вектор напряжений на емкостях с числом элемен- |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
студенты должны закрепить полученные теоретические |
||||||||||||||||||||||||||||||||||||||||||
тов nC = y1 – nE по числу емкостей, вошедших в дерево |
||||||||||||||||||||||||||||||||||||||||||
графа; IR – вектор токов в сопротивлениях размером nR |
знания и приобрести практические навыки по исследо- |
|||||||||||||||||||||||||||||||||||||||||
по числу сопротивлений, вошедших в число связей |
ванию и наладке электроприводов. Анализ механических |
|||||||||||||||||||||||||||||||||||||||||
графа; IL – вектор |
токов в |
индуктивностях |
размером |
и электромеханических характеристик двигателей по- |
||||||||||||||||||||||||||||||||||||||
nL = z2 – nR – nI по числу индуктивностей, |
вошедших |
стоянного и переменного тока в различных режимах ра- |
||||||||||||||||||||||||||||||||||||||||
в число связей графа; |
II |
– вектор токов в источниках |
боты выполняется на базе ВЛС. В частности, в настоя- |
|||||||||||||||||||||||||||||||||||||||
тока размером nI по числу источников тока. |
|
|
щее время реализованы следующие работы: |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 582 -

Библиографический список |
|
4. |
Тихонов А.И. Основы теории подобия и моделирования (электри- |
||
|
|
|
|
|
ческие машины): учеб. пособие / Иванов. гос. энергетич. ун-т им. |
1. Филичев В.Т., |
Куленко М.С. |
Программно-аппаратное |
обес- |
|
В.И. Ленина. Иваново, 2011. 132 с. |
печение лабораторных исследований систем электропривода // |
5. |
Нейман Л.Р., Демирчан К.С. Теоретические основы электротех- |
|||
Труды V11 Междунар. (XV111 Всерос.) конф. по автомати- |
|
ники. 3-е изд., перераб. и доп. Л.: Энергоатомиздат; Ленингр. отд- |
|||
зированному |
электроприводу |
АЭП-2012. Иваново, |
2012. |
|
ние, 1981. Т. 1. 536 с.. |
С. 662–664. |
|
|
|
6. |
Тихонов А.И., Стулов А.В., Дрязгов Д.Е. Разработка автономной |
2. Тихонов А.И. Виртуальный лабораторный программный комп- |
|
библиотекимоделированияэлектрических цепейдлясозданиявирту- |
|||
лекс: св-во о гос. регистр. программы для ЭВМ / Федеральная |
|
альных лабораторий численного исследования моделей электри- |
|||
служба по интеллектуальной собственности, патентам и товар- |
|
ческихмашин// ВестникИГЭУ. Иваново, 2016. Вып. 1. С. 34–39. |
|||
ным знакам. № 2013619340; заяв. № 2013617109, приоритет от |
7. |
Тихонов А.И., Булатов Л.Н. Платформонезависимая библиотека |
|||
7.08.2013; Зарегистрировано в Реестре программ для ЭВМ |
|
конечно-элементного моделирования магнитного поля: св-во |
|||
2.10.2013. |
|
|
|
|
о гос. рег. программы для ЭВМ / Федеральная служба по интел- |
3. Филичев В.Т., Тихонов А.И., Корнев И.А. Методические указа- |
|
лектуальной собственности, патентам и товарным знакам. |
|||
ния к лабораторным работам по курсу Электропривод / Иванов. |
|
№ 2011614852; заяв. № 2011613040, приоритет от 28.04.2011; |
|||
гос. энергетич. ун-т им. В.И. Ленина. Иваново, 2016. 56 с. |
|
|
Зарегистрировано в Реестре программ для ЭВМ 22.06.2011. |
||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 584 -

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нической системы конкретного объекта зачастую при- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
водит к бесполезным расходам – при достаточно высо- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кой стоимости таких систем, эффект от их применения |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
может оказаться минимальным. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система ДКИН, функциональная схема которой при- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ведена на рис. 4, призвана обеспечить приемлемый уро- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вень напряжения на период воздействия возмущающего |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
фактора. Данные устройства имеют в своем составе на- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
копители энергии, вследствие чего они в некоторой сте- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пени автономны. Следовательно, возможность их при- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
менения не ограничена степенью взаимной зависимости |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
источников электроснабжения. Тем не менее, и в данном |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
случае существуют определенные ограничения. Основ- |
||||||||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
б |
ными из них следует считать отличие уровня напряже- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния на выходе ДКИН от номинального значения. Суще- |
|||||||||||||||||||||
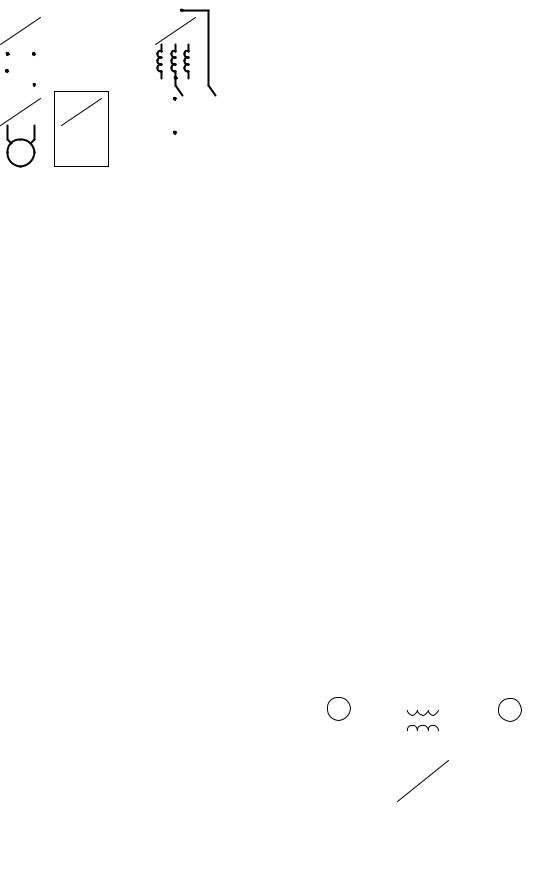
Рис. 3. Схемы СБП ЧРП: а – для одиночного ЧРП; |
ственно, что величина такого отличия сильно зависит от |
||||||||||||||||||||||||||||||||||||||||
б – схема подключения DC/DC преобразователя |
параметров возмущающего воздействия. Вторым огра- |
||||||||||||||||||||||||||||||||||||||||
этом, однако, необходимо учитывать возрастающую |
ничивающим фактором следует считать весьма ограни- |
||||||||||||||||||||||||||||||||||||||||
ченное время поддержания напряжения на выходе. Уст- |
|||||||||||||||||||||||||||||||||||||||||
вероятность возникновения нештатных режимов, в пер- |
ройства ДКИН с достаточно большим временем поддер- |
||||||||||||||||||||||||||||||||||||||||
вую очередь, коротких замыканий, на самих шинах по- |
жания на сегодняшний день имеют очень большую |
||||||||||||||||||||||||||||||||||||||||
стоянного тока, а также отрицательное влияние нако- |
стоимость, приближающуюся к стоимости систем беспе- |
||||||||||||||||||||||||||||||||||||||||
пителей большой мощности на питающую сеть. |
ребойного электроснабжения большой мощности. Оцен- |
||||||||||||||||||||||||||||||||||||||||
В качестве решения обозначенной проблемы для |
ка возможности применения ДКИН для повышения ус- |
||||||||||||||||||||||||||||||||||||||||
многомашинных электротехнических систем отечест- |
тойчивости |
регулируемых |
приводов также |
требует |
|||||||||||||||||||||||||||||||||||||
венные и зарубежные производители электротехниче- |
предварительных исследований. В ряде случаев необхо- |
||||||||||||||||||||||||||||||||||||||||
ского оборудования предлагают использовать системы |
димы |
экспериментальные работы, поскольку |
данные |
||||||||||||||||||||||||||||||||||||||
быстрого автоматического ввода резерва (БАВР) или |
о степени чувствительности преобразователей |
частоты |
|||||||||||||||||||||||||||||||||||||||
динамические компенсаторы искажений напряжения |
того или иного производителя к провалам напряжения |
||||||||||||||||||||||||||||||||||||||||
(ДКИН). И те и другие устройства широко представле- |
далеко не всегда доступны потребителю. |
|
|||||||||||||||||||||||||||||||||||||||
ны на рынке. Отметим |
основные особенности назван- |
Отметим, что единых универсальных решений по |
|||||||||||||||||||||||||||||||||||||||
ных устройств с точки зрения обеспечения устойчиво- |
повышению устойчивости электротехнических систем |
||||||||||||||||||||||||||||||||||||||||
сти электротехнических систем. |
современных |
высокотехнологичных предприятий не |
|||||||||||||||||||||||||||||||||||||||
Системы БАВР предназначены для быстрого пере- |
существует. В ряде случаев для обеспечения надежно- |
||||||||||||||||||||||||||||||||||||||||
ключения питания потребителей с аварийного источни- |
го и устойчивого функционирования электротехниче- |
||||||||||||||||||||||||||||||||||||||||
ка электроснабжения на резервный. Время переключе- |
ской |
системы предприятия |
приходится прибегать |
||||||||||||||||||||||||||||||||||||||
ния при применении данных систем значительно мень- |
к весьма сложным и дорогостоящим техническим ре- |
||||||||||||||||||||||||||||||||||||||||
ше, чем при использовании традиционных систем АВР. |
шениям [9]. Исходя из вышесказанного, представляет- |
||||||||||||||||||||||||||||||||||||||||
В лучших моделях это время сопоставимо с запасом |
ся обоснованным искать пути повышения устойчиво- |
||||||||||||||||||||||||||||||||||||||||
устойчивости регулируемых приводов и составляет |
сти таких систем в совершенствовании самих систем |
||||||||||||||||||||||||||||||||||||||||
десятки миллисекунд. Такие устройства достаточно |
управления электроприводами, разработке новых ал- |
||||||||||||||||||||||||||||||||||||||||
надежны и не требуют применения накопителей энер- |
горитмов их работы при возмущениях в системах |
||||||||||||||||||||||||||||||||||||||||
гии. Вместе с тем, их применение связано с наличием |
электроснабжения. |
|
|
|
|||||||||||||||||||||||||||||||||||||
определенных проблем. Основными из них следует |
Для иллюстрации вышеизложенного в программном |
||||||||||||||||||||||||||||||||||||||||
считать высокие требования к независимости источни- |
комплексе SAD [3] были внесены изменения, позво- |
||||||||||||||||||||||||||||||||||||||||
ков электроснабжения и наличие бестоковой паузы во |
ляющие учитывать наличие в системе БАВР, ДКИН, |
||||||||||||||||||||||||||||||||||||||||
время переключения. Первая из этих проблем обостри- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
лась с принятием новых нормативных документов в |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
части регулирования взаимоотношений поставщиков и |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
потребителей электрической энергии [9]. Действующие |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
нормативные документы не накладывают никаких ог- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
раничений на степень зависимости источников в ава- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
рийных режимах, то есть, именно в тех ситуациях, ко- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
гда и должны работать системы БАВР. Таким образом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
оценка возможности использования БАВР связана с |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
необходимостью оценки степени независимости источ- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
ников расчетным либо экспериментальным путем [3]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Опыт показывает, что требуемый уровень независимо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
сти обеспечивается энергоснабжающей организацией |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
далеко не всегда. Таким образом, установка систем |
|
Рис. 4. Функциональная схема динамического |
|
||||||||||||||||||||||||||||||||||||||
БАРВ без предварительного исследования электротех- |
|
|
компенсатора искажения напряжения |
|
|||||||||||||||||||||||||||||||||||||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 587 -