Пример выполнения задания
Дано: m1 = 2 кг, m2 = 3 кг, J1 = 0,8 кг м2 , l = 1 м, φ(0) = 0, φ(τ)= π6 рад, τ = 0,5 с.
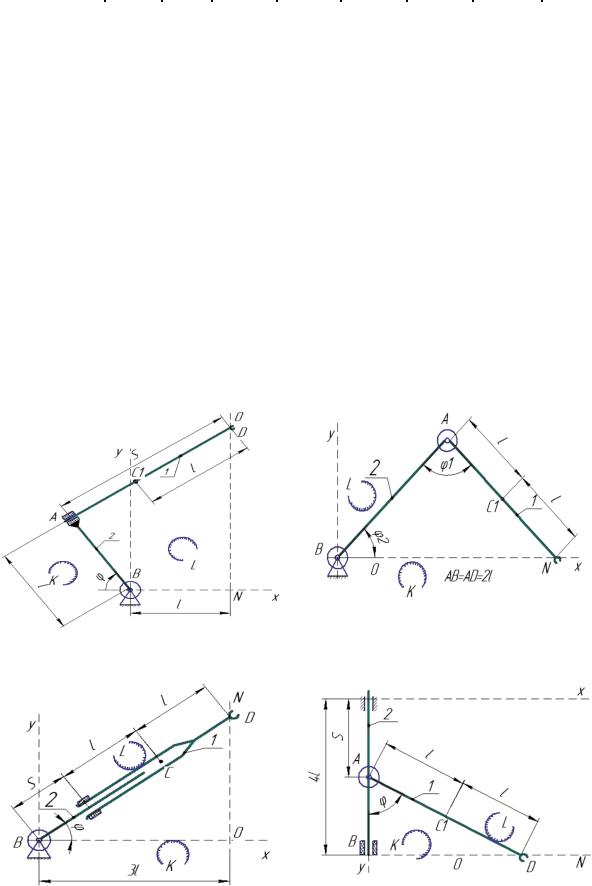
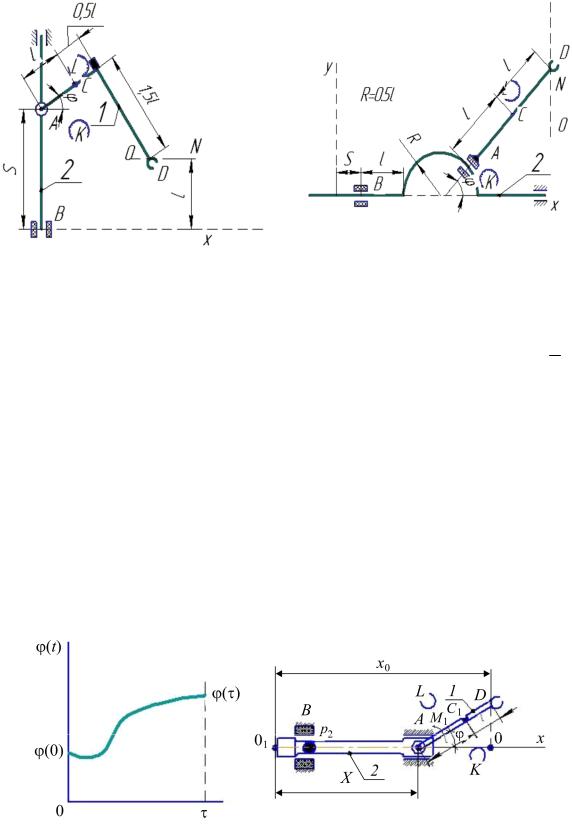
Центр тяжести звена 1 находится в точке С1 (рис. 1):
φ(t ) = φ(0) + φ(τ) − φ(0) |
− |
t |
− |
|
1 |
sin |
|
2πt |
15t . |
|
|
|
|
|
|
|
|
|
τ |
|
|
|
τ |
|
|
|
|
|
|
|
(2π) |
|
τ |
|
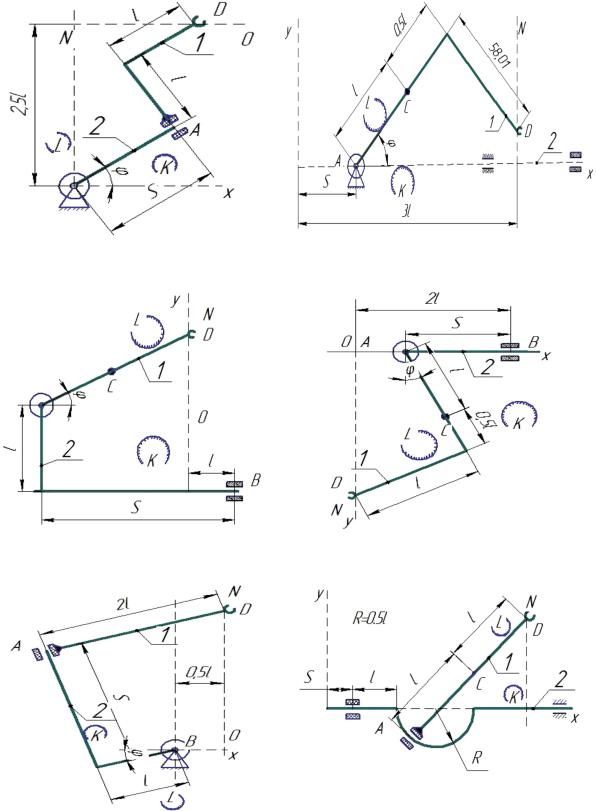
Найти управляющий момент М и управляющую силу Р.
Решение. Для решения задачи применим уравнения Лагранжа II рода. Будем рассматривать механическую систему как систему с двумя степенями свободы, приняв за обобщенные координаты угол φповорота звена 1 и сме-
щение х звена 2.
Рис. 1

Для рассматриваемой механической системы можно записать
yC |
= const; |
xC = x + l cosl cosφ; |
yC = l sin φ. |
(1) |
|
2 |
1 |
1 |
|
Эти равенства играют роль уравнений связей.
В соответствии с выбранными обобщенными координатами имеем
|
|
|
|
|
∂T |
|
|
|
d |
|
|
∂T |
− |
= Qφ, |
|
|
∂φ |
dt |
∂φ |
|
(2) |
|
|
|
∂T |
|
∂T |
d |
− |
= Qx . |
|
|
|
|
|
∂x |
|
|
dt |
∂x |
|
|
Совокупность уравнений (1) и (2) позволяет составить дифференци-
альные уравнения движения механической системы.
Составим выражение для кинетической энергии системы Т как функ-
цию обобщенных скоростей φ и x и обобщенных координат φ и х. Кинетическая энергия системы равна сумме кинетической энергии Т1
звена 1 и Т2 звена 2.
Кинетическая энергия звена 1, совершающего плоское движение,
Т = m1UC21 + J1ω12 .
1 2 2
Кинетическая энергия звена 2, совершающего поступательное движение,
|
|
|
|
|
|
|
|
|
|
Т2 = |
m U |
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1 = φ; U2 = x. |
|
|
|
|
|
|
|
Продифференцировав (2) по времени, будем иметь |
|
|
|
|
|
|
|
|
|
xC |
= x − lφsin φ; yC = lφcosφ, |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
2 |
= x2 + y2 |
|
= x2 |
+ l2φ2 − 2lφxsin φ. |
|
|
|
|
|
|
|
C |
|
|
|
C |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т = |
|
m x2 |
+ |
|
m l2φ2 |
− |
|
2m lx |
φ(sin φ) |
+ |
J φ2 |
+ |
m x |
2 |
= |
|
|
1 |
|
|
|
|
1 |
|
1 |
|
|
|
|
1 |
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
(m |
+ m ) x2 |
+ |
(m1l2 + J1 )φ2 |
− m1lxφsin φ. |
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найдем значения слагаемых уравнений Лагранжа:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂T |
= |
(m |
|
+ |
m |
|
|
) x |
− |
m l |
sin |
φ |
, |
|
|
|
|
|
|
|
|
∂x |
|
1 |
|
|
|
2 |
|
|
|
|
|
|
1 |
|
φ |
|
|
|
|
|
|
|
|
|
|
|
d |
∂T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
(m |
|
+ |
|
m |
|
) x |
|
− |
m l sin |
φ − |
m l |
cos |
φ |
, |
|
|
|
|
|
|
|
|
dt ∂x |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
1 |
φ |
|
|
|
|
1 φ |
|
|
|
∂T = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂T |
= |
|
|
|
2 |
+ |
|
|
|
|
|
|
|
|
|
m lx sin |
φ |
|
|
|
|
|
|
|
|
|
m l |
J |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
∂φ |
( |
1 |
|
|
|
|
1 )φ − |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
∂T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
= ( |
m l |
2 |
|
+ |
J |
|
|
|
|
m lx sin |
φ − |
m lx |
cos |
φ |
, |
|
|
|
|
|
|
dt ∂φ |
|
1 |
|
|
|
|
|
1 )φ − |
|
1 |
|
|
|
|
1 |
φ |
|
|
|
∂T |
= −m lx |
φcos φ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂φ |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим обобщенные силы Qx иQφ.
Для определения Qx мысленно наложим на систему связь φ = const и,
сообщив системе возможную скорость х, вычислим возможную мощность сил, действующих на нее:
Nx = Qx x = Px, |
|
отсюда |
|
Qx = P. |
(3) |
Аналогично мысленно наложив на механическую систему |
x = const и |
сообщив ей возможную скорость φ, получим выражение возможной мощности Nφ :
Nφ = Qφφ = Mφ,
отсюда
Обобщенные силы Qx иQφ можно найти из выражения работы сил на
элементарных перемещениях системы, соответствующих вариации каждой обобщенной координаты:
δAx = Qxδx = Pδx; δAx = Qxδφ = Pδφ.
Подставляя в соответствующие формулы, получим
|
(m |
+ m ) x − m lφsin φ− m lφ2 cosφ = P; |
|
|
|
1 |
2 |
1 |
1 |
(5) |
|
|
(m l2 + J |
)φ− m lxsin φ = M . |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
1 |
|
|
|
|
|
Так как захват D манипулятора по условию задачи должен двигаться вдоль по прямой, перпендикулярной оси x, на механизм дополнительно оказывается наложенной связь
x + 2l cosφ = x0
или
x = x0 − 2l cosφ(x0 = const),
следовательно,
x = 2lφsin φ.
Отсюда
|
|
|
x = 2lφin φ+ 2lφ2 cosφ. |
|
(6) |
Приходим к соотношениям |
|
|
|
M = (m l2 |
+ J |
)φ− 2l |
2m φsin2 φ− l |
2m φ2 sin 2φ, |
|
|
1 |
|
1 |
|
1 |
1 |
(7) |
|
|
+ 2m2 )(φsin φ+ φ2 cosφ)l. |
P = (m1 |
|
|
|
|
|
|
|
|
|
Равенства (7) представляют собой зависимость управляющего момент М
и управляющего усилия Р от известных функций φ, φ и φ. Так как φ является заданной функцией времени, то вычисление производных φиφ, а следова-
тельно, управляющего момента М и усилия Р не представляет труда.
Вычислим М и Р в момент начала торможения звена 1. В этом случае
угловое ускорение φ обращается в нуль. Определяем производные φиφ:
|
|
|
|
− |
cos2 πt |
|
|
|
|
|
|
sin 2πt |
|
|
|
|
|
1 |
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
φ = φ(τ) − φ(0) |
|
|
|
|
; |
φ = 2π φ(τ) − φ(0) |
τ . |
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ2 |
|
|
|
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π φ(τ) − φ(π) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 2πt = 0 |
|
|
|
|
|
|
|
|
|
|
|
τ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
t = π; |
|
t = |
τ |
. |
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
Таким образом, торможение звена 1 начинается в момент времени t = |
τ |
. |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этотмоментвремени