

962
.pdfстами Дорожного агентства Пермского края (рис. 3). После создания геометрических моделей была произведена нагрузка рассчитанными интенсивностями транспортных потоков в прогнозе на 2010, 2016 и 2030 г. По сравнению с 2010 г. интенсивность транспортных потоков будет увеличена на 26 % в 2016 г. и на 60 % в 2030 г.
Рис. 3. Развязка «Новопермская ТЭЦ» в «новой» схеме организации
Для каждого года оценивалось время реализации внутригородских и внешних городских корреспонденций. Моделирование с полученными интенсивностями транспортных потоков для утреннего часа пик до 2030 г. не выявило проблемных мест в анализируемых схемах организации движения. Чтобы определить максимальную пропускную способность и найти «узкие» места в организации движения, исходную интенсивность транспортных потоков в час пик увеличивали в 2, 3, 4 раза по сравнению с их загрузкой на 2010 г., при этом баланс распределения интенсивности на различных маршрутах не изменялся. Такой прием помог определить «узкие» места проектных предложений. Несмотря на то что выявленные в результате моделирования проблемы функционирования реконструируемой части ВО возникают за пределами горизонта прогнозирования (2030 г.), информация о их существовании важна для проектировщиков.
Таким образом, микромоделирование показало, что до 2030 г развязки обеспечивают эффективную работу реконструируемого участка ВО, за исключением развязки «Новопермская ТЭЦ» в «старой» схеме проекта реконструкции. На данной развязке уже к 2030 г. возникают проблемы обеспечения скоростного режима 110 км/ч по ВО.
При анализе предельной пропускной способности лучшие результаты эффективности показали «новые» схемы проекта реконструкции и организации движения. И в заключение отметим, именно совместное
121
использование инструментов макро- и микромоделирования позволило компетентно оценить проектировочные решения и выбрать лучшее.
Список литературы
1.Петров В.Ю., Петухов М.Ю., Якимов М.Р. Анализ режимов работы улично-дорожной сети крупных городов на примере города Перми / Перм. гос. техн. ун-т. – Пермь, 2004. – 274 с.
2.Якимов М.Р. Транспортные системы крупных городов. – Пермь: Изд-во Перм. гос. техн. ун-та, 2008. – 144 с.
Получено 16.08.2010
122
УДК 621.873.327
БЕЗОПАСНОСТЬ ДВИЖЕНИЯ СТРЕЛОВЫХ САМОХОДНЫХ КРАНОВ
С.И. Вахрушев
Пермский государственный технический университет
Стреловые самоходные краны характеризуются высоким расположением центра масс и большими габаритами. Статистика ГИБДД показывает, что такие агрегаты часто теряют поперечную устойчивость на повороте и значительно влияют на безопасность движения. Дана оценка совместного влияния дорожных условий, массово-габаритных характеристик и скорости движения на безопасность на дорогах.
Безопасность движения любого транспортного средства характе- ризу-ется двумя основными параметрами: устойчивостью к заносу и опрокидыванию, а также тормозным путем.
Оба этих параметра зависят от коэффициента сцепления шин с дорогой, называемого также силой трения, а он, в свою очередь, зависит от типа и состояния дорожного покрытия, рисунка и степени износа протектора шин. Приближенные значения этого коэффициента (в зави-
симости от типа и состояния дорожного покрытия): |
|
Цементно-бетонное покрытие, сухое............................................ |
0,6 |
Асфальтобетонное покрытие, сухое............................................. |
0,6 |
Каменная мостовая, сухая............................................................ |
0,55 |
Каменная мостовая, мокрая, чистая............................................ |
0,45 |
Битумное покрытие и щебень, сухие............................................ |
0,4 |
Цементно-бетонное покрытие, мокрое......................................... |
0,4 |
Асфальтобетонное покрытие, мокрое, грязное............................ |
0,3 |
Уплотненный снег, скользкое асфальтобетонное покрытие, |
|
свежеувлажненное.......................................................................... |
0,2 |
Обледеневшее дорожное покрытие, гладкое............................... |
0,1 |
В комментариях к Правилам дорожного движения РФ [1] предлагается формула предельно допустимой скорости движения по условиям устойчивости
123
V =8 RB / H ,
где R – радиус поворота; В – ширина колеи транспортного средства; Н – высота расположения центра тяжести.
С целью предотвращения заноса транспортного средства в кювет по эмпирической формуле определяют предельную скорость движения на повороте:
V =11,3 µR ,
где µ – коэффициент сцепления шин с дорогой; R – радиус поворота. Зависимость скорости движения от коэффициента сцепления и
радиуса закругления дороги представлена на рис.1.
Рис. 1. Зависимость предельной скорости движения на повороте по заносу от коэффициента сцепления шин с дорогой и радиуса закругления дороги
Помимо заноса, опасность представляет возможность опрокидывания крана на повороте, когда центробежная сила, параллельная плоскости дороги, действует в ту же сторону, что и составляющая силы тяжести G sin α (рис. 2).
124

Рис. 2. Расчетная схема для определения поперечной устойчивости самоходного крана при движении с поворотом на склоне
Как видно из расчетной схемы, при движении самоходного стрелового крана на него кроме силы тяжести действует центробежная сила:
Pц = G ω2 R = GV 2 , g gR
где G – сила тяжести; g – ускорение свободного падения; ω – угловая скорость движения на повороте; V – скорость движения стрелового самоходного крана на повороте.
Центробежная сила, стремящаяся опрокинуть стреловой самоходный кран на повороте зависит от массы крана, квадрата скорости движения и радиуса поворота [2].
Опрокидывающий момент относительно ребра опрокидывания (на рис. 2 показана проекция в точке А) описывается уравнением
Mопр = G sin αH + GV 2 H , gR
где α – угол склона; Н – высота расположения общего центра масс самоходного стрелового крана.
125

Момент запаса устойчивости относительно точки А
Mзап = G cos α |
B |
−G sin αH + |
GV 2 |
H , |
|
2 |
gR |
||||
|
|
|
где В – ширина колеи самоходного стрелового крана. Критическую скорость движения, соответствующую условию
|
|
Mзап = 0 , |
|
|
||
определяем из уравнения |
|
|
|
|
|
|
G cos α |
B |
−G sin αH |
+ |
GV 2 |
H = 0 , |
|
2 |
gR |
|||||
|
|
|
|
|||
откуда окончательно получим
V =Vкр = (2BH cos α−sin α)Rg .
Критическая скорость движения крана на повороте зависит от ширины колеи и высоты расположения центра масс крана, а также от величины угла склона и радиуса поворота.
Критическая скорость движения крана на повороте должна быть тем меньше, чем больше угол склона и меньше радиус поворота крана, так как массово-геометрическиехарактеристикикраназадаютсяконструктивно.
Проведенные аналитические исследования позволили построить график зависимости предельной скорости движения самоходного стрелового крана от радиуса поворота и угла наклона дороги (рис. 3).
R, м
V, км/ч
Рис. 3. Зависимость критической скорости движения крана на повороте по опрокидыванию от радиуса поворота крана и угла наклона дороги
126

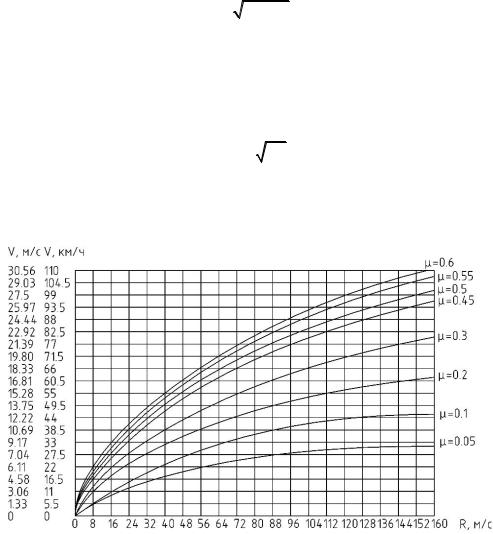
Следовательно, для обеспечения поперечной устойчивости самоходного стрелового крана в движении необходимо максимально затормаживать на входе в поворот. Автомобиль затормаживается вследствие трения колодок или щек тормозов о барабаны или диски. Если конструкция этих узлов удачная, а усилие на щеках или колодках достаточное, то можно это трение увеличить настолько, что колеса автомобиля перестанут вращаться. Тогда они начнут скользить по поверхности дороги, т.е. продвигаться по дороге с сопротивлением, равным по величине силе трения шин о поверхность дороги. Это может привести к потере поперечной устойчивости крана по скольжению. Величина силы трения зависит от коэффициента сцепления шин с дорогой µ. Формула пути торможения будет выглядеть следующим образом:
Sт = |
V 2 |
. |
|
26gµ |
|||
|
|
Как видно из формулы, масса автомобиля не влияет на длину тормозного пути. График зависимости между длиной пути торможения, скоростью движения и коэффициентом сцепления показан на рис. 4.
V, км/ч |
µ=0,6 µ=0,5 µ=0,4 |
µ=0,3 |
µ=0,2 µ=0,1
Sm, м
Рис. 4. Зависимость тормозного пути от скорости автомобиля и коэффициента сцепления шин с дорогой
Выводы:
1. Для обеспечения безопасного передвижения самоходных стреловых кранов по дорогам общего пользования необходимо соблюдение скоростного режима.
127
2.Критическая скорость по заносу зависит от состояния дороги, колес и радиуса поворота.
3.Критическая скорость по опрокидыванию зависит от радиуса поворота и угла наклона проезжей части.
4.Длина тормозного пути зависит от скорости движения крана
икоэффициента сцепления шин с дорогой.
Список литературы
1.Комментарий к Правилам дорожного движения Российской Федерации ГУП ЦПП. – М., 2010. – 217 с.
2.Гоберман Л.А. Основы теории, расчета и проектирования строительных и дорожных машин. – М.: Машиностроение, 1988. – 462 с.
Получено 16.08.2010
128
УДК 656.084:531.66
МЕТОДИКА РАСЧЕТА ПОЛОЖЕНИЯ ЛИНИИ ДЕЙСТВИЯ УДАРНОГО ИМПУЛЬСА НА ТРАНСПОРТНЫЕ СРЕДСТВА ПРИ СТОЛКНОВЕНИЯХ С КОСЫМ СОУДАРЕНИЕМ
А.В. Попов, А.А. Горбунов
Пермский государственный технический университет
Рассмотрена методика расчета положения линии действия ударного импульса на транспортные средства при столкновениях с косым соударением для установления значений параметров движения автомобилей до момента их столкновения. Установлено, что положение линии действия ударного импульса относительно сталкивающихся транспортных средств может быть найдено для всех случаев косого соударения.
Установление значений параметров движения автомобилей до момента их столкновения – это сложная задача автотехнической экспертизы. Достоверность расчетов, полученной экспертом при изучении деталей дорожно-транспортного происшествия (ДТП), является основной целью такого исследования. Адекватность модели столкновения во многом зависит от используемой методики расчета и от квалификации эксперта, осуществляющего выбор расчетной методики. Сегодня попрежнему большой популярностью пользуется известная методика [2], несмотря на большое количество имеющихся допущений в расчетах. Неоспоримым преимуществом такой методики является простота и доступность предлагаемых аналитических вычислений. Это минимизирует вероятность умышленного и случайного искажения расчетов в процессе проведения экспертизы. Однако, известные недостатки, такие, как отсутствие учета вращения, вызванного ударным импульсом при косом соударении; отсутствие возможности оценки затрат энергии на деформацию автомобильных деталей, требуют совершенствования методики в целом.
Существующие программные продукты по моделированию ДТП, такие как DELTA-V, CARAT-3 и т.п., позволяют более точно воспроиз-
129

водить картину ДТП, при этом имеются возможности наглядной визуализации столкновения. Однако их применение требует ввода определенного количества исходных данных, часть из которых не может быть доподлинно известна, что приводит к самостоятельному выбору этих данных экспертом. В случае ошибочного выбора полученные результаты также могут отличаться от фактических значений параметров движения. Данное обстоятельство заставляет искать способы определения таких значений исходных параметров, применение которых в расчете привело бы к однозначному и единственному решению задачи о столкновении двух транспортных средств (ТС) – решению, в достаточной степени соответствующему действительности.
Одной из проблем, связанных с решением задачи столкновения автомобилей при косом соударении, является отсутствие информации о положении линии действия ударного импульса. Целью настоящей работы является анализ процесса столкновения, и поиск способа аналитического вычисления положения линии удара.
Для наглядности анализа, рассмотрим частную модель косого соударения (см. рисунок). Пусть сталкиваются два ТС различной массы под некоторым углом относительно друг друга. Такое столкновение можно охарактеризовать как нецентральное косое соударение1. Главным отличием центрального соударения является отсутствие воздействия на ТС вращательного ударного импульса. На практике возможно решение задач центрального соударения, но в настоящей работе пример не приводится ввиду достаточно простого и точного решения даже при помощи известной методики [2].
Предлагаемая модель будет иметь ряд допущений, которые безусловно влияют на точность конечного результата, однако это позволит упростить решение:
1)удар происходит мгновенно;
2)силы трения в точке соударения пренебрежительно малы;
3)ударный импульс действует вдоль линии – нормали к точке
удара.
1Следует отметить, что решение поставленной задачи с использованием методики [2] приведет к искажению расчетов, по причине отсутствия момента импульса: линия удара, согласно методики [2], проходит через центры масс сталкивающихся автомобилей.
130