

МЕТОДИЧЕСКОЕ РУКОВОДСТВО К ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ ПО ДИСЦИПЛИНЕ «ЭЛЕКТРОПРИВОД»
.pdfM0 = Mx x = Мн – Мн в,
где Мн, Мн в – номинальный электромагнитный момент двигателя и номинальный момент на его валу.
Для ДПТ независимого возбуждения Мн = kФ Iя н,
где kФ = |
uн − Iя н Rя∑ |
– коэффициент ЭДС двигателя; k = |
N pп |
– |
|
||||
|
ωн |
|
2πa |
|
конструктивный коэффициент двигателя.
Номинальный электромагнитный момент асинхронного двигателя
|
|
3 u2 |
|
|
|
r |
′ |
|
||
|
|
|
|
2 |
|
|
||||
|
|
|
S |
|
|
|
||||
Мн = |
|
|
1 нФ |
|
н |
. |
||||
|
|
|
|
|
|
|
||||
|
|
|
r′ |
2 |
|
|
||||
|
|
|
|
|
||||||
|
ω0 |
r1 |
+ |
2 |
|
|
+ xk2 |
|
||
|
|
|
||||||||
|
|
|
|
Sн |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Номинальный момент на валу
Mн в = Pнω103 .
н
Фактический момент сопротивления рабочей машины
Mci = Mci′ + M0 .
Приведенный момент сопротивления рабочей машины, соответствующий каждой из установившихся скоростей ωдi двигателя
(без учета КПД передачи)
Mci′ = Mci .
j
Отложив на графике значения момента сопротивления и скорости, постройте характеристику момента сопротивления на валу двигателяωд= f(Мci), котораяи используетсявдальнейшихрасчетах.
К п. 9. Прежде чем рассчитывать статические механические характеристики, соответствующие заданным установившимся скоростям, необходимо обосновать способы управления электропри-
11
Стр. 11 |
ЭБ ПНИПУ (elib.pstu.ru) |
водами в режимах пуска, регулирования скорости и торможения. При этом следует учесть, что технологический процесс допускает изменение установившихся скоростей в пределах ± 5 %, а низкая (заправочная) скорость может быть изменена в пределах ± 50 %.
Если студент за основную скорость, соответствующую номинальному напряжению, принял наименьшую, а согласно заданной тахограмме требуется получить более высокую скорость (в системе Г–Д и ТП–Д), необходимо ослабить магнитный поток двигателя. В этом случае студент предварительно устанавливает, допустимо ли при заданных условиях ослабление потока, т.е. выясняет, не будет ли ток якоря превышать допустимое с точки зрения коммутации значение, и лишь после этого делает заключение о способе разгона двигателя до заданной повышенной скорости. Допустимый ток при ослаблении магнитного потока не должен превышать
I |
′ |
= I |
|
(2...2,5) |
ωн |
I |
|
|
Фосл |
I |
|
|
ωн |
, |
|
доп |
н |
ω |
доп |
|
доп |
ω |
|||||||||
|
|
|
|
|
Ф |
н |
|
|
|||||||
|
|
|
|
|
ci |
|
|
|
|
|
|
ci |
|
||
где ωci – скорость, на которой двигатель должен работать при ослабленном потоке Фосл ; ωн – номинальная скорость при номинальном потоке Фн ; Iдоп – допустимый ток при Фн .
Требуемое значение ослабленного потока Фосл находится из
уравнения механической характеристики двигателя при подстановке в него заданной повышенной скорости.
|
u |
|
Rя∑ |
|
ωci = |
|
− |
|
Mc . |
kФосл |
(kФосл )2 |
|||
Решая его относительно коэффициента ЭДС kФосл , находят два |
||||
значения коэффициента ЭДС. |
Реальным считается kФосл , отли- |
|||
чающийся от коэффициента ЭДС kФн при номинальном потоке (он определен ранее в п. 8) не более чем в два раза.
12
Стр. 12 |
ЭБ ПНИПУ (elib.pstu.ru) |

Далее определяется относительный ослабленный поток
ϕосл = Фосл ,
Фн
по кривой намагничивания двигателя серии Д (она дана в табличном виде в табл. П13) находится относительный ток возбуждения, соответствующий Фосл , ивычисляется абсолютноезначение этоготока
Iв осл = iв осл Iв н .
Добавочное сопротивление, которое нужно ввести в цепь возбуждения для обеспечения протекания этого тока,
R |
= |
|
u |
− R . |
|
|
|||
в доб |
|
I |
|
в |
|
|
в осл |
||
При питании обмотки возбуждения двигателя от тиристорного возбудителя следует определить напряжение на его выходе, следовательно, на обмотке возбуждения двигателя, необходимое для получения нужного значения тока и соответствующего ему ослабленного потока Фосл
Uв = Iв осл Rв .
Ток в якорной цепи при ослабленном потоке
Iя′ = Mc
kФосл
сравнивается с максимально допустимым током Iдоп′ , и делается
вывод о его приемлемости.
При решении применить двухзонное регулирование скорости системы ТПЧ–АД необходимо выполнение условия
Мкр ≥ 2,
Мс
где Мкр и Мс – критический момент двигателя при f1 > f1н и момент статического сопротивлениявустановившемся режимеработы.
13
Стр. 13 |
ЭБ ПНИПУ (elib.pstu.ru) |

|
3u2 |
|
|
' |
' |
f |
|
|
1 Фн |
|
|
1 |
|
||
Мкр = |
2ω0P (r1 + r12 + xk'2 |
) |
; |
xk |
= (x1 + x2 ) |
f1н |
, |
где ω0P , xk' – скорость идеального х.х. и индуктивное сопротивление к.з. при f1 > f1н .
Если Мкр < 2 , двухзонное регулирование применять не реко-
Мс
мендуется.
Торможение электропривода во всех системах рекуперативное. Остановку двигателя на последнем участке цикла можно осуществлять свободным выбегом, если на этом участке двигатель работает с небольшой (по сравнению с предыдущими участками цикла) скоростью.
К п.10. Порядок расчета статических механических характеристик системы Г–Д следующий:
1. Определяется номинальная ЭДС генератора, соответствующая номинальной нагрузке, и определяется скорость идеального х.х. основнойхарактеристикой приноминальном потоке Фн двигателя
E2н = kФн ωн + Iн Rя∑ = uн + Iн Rяг ,
где Rя∑ = Rя д + Rяг.
2. Скорость идеального холостого хода двигателя, соответствующая его основной характеристике,
ω0 = EФгн .
k н
3. Строится основная характеристика по двум точкам с координатами
ω = ω0 , М = 0; ω = ωн, М = Мн.
4. Для расчета характеристик, соответствующих другим скоростям идеального х.х., необходимо определить ЭДС генератора при
14
Стр. 14 |
ЭБ ПНИПУ (elib.pstu.ru) |

вычисленных в п. 7 скоростях двигателя и найти скорости идеального х.х.
E = kФ |
|
ω |
|
+ I |
|
R |
; ω |
= |
Eгх |
. |
|
|
|
|
|||||||
гх |
н |
|
х |
|
н |
я∑ |
0х |
|
kФн |
|
5.Далее расчет регулировочных характеристик делается соответственно п. 3.
6.Поток возбуждения генератора, создающий ЭДС Eг х ,
Фг х = Eг х , kгωн г
где kг = N πарп . 2
7. По кривой намагничивания генератора (см. табл. П13) находится соответствующий ток возбуждения генератора (в именованных или относительных единицах) Iв х или iв х .
8. Соответствующее напряжение возбуждения генератора
Uв х = Iв х rв.
Для построения механической характеристики, соответствующей ослабленному потоку, определяется ЭДС
Eг осл = kФосл ωосл + Iн Rя∑
и скорость идеального х.х.
ω |
|
= |
Eг осл |
. |
0 |
осл |
|
kФосл |
|
Характеристика строится так же, как и в п. 3.
Для расчета и построения статических механических характеристик системы ТП–Д, соответствующих заданным установившимся скоростям вращения двигателя, предварительно определяется эквивалентное сопротивление якорной цепи
15
Стр. 15 |
ЭБ ПНИПУ (elib.pstu.ru) |
Rэ = m Xтр + 2Rтр + Rя∑ + Rс др + 2Rу др,
2π
где m – число пульсаций выпрямленного напряжения (для мостовой схемы m = 6);
активное и реактивное сопротивление трансформатора:
R = |
∆Рк з |
|
; |
X |
|
= |
Uк з % U1Ф |
, |
||
|
|
|
|
|||||||
тр |
т I 2 |
К2 |
|
|
тр |
|
100I |
k2 |
||
|
1 1н |
|
тр |
|
|
|
|
1н |
тр |
|
где ∆Рк з – потери короткого замыкания трансформатора, Вт; т1 – число фаз; Uк з % – напряжение короткого замыкания трансформа-
тора; kтр = U1Ф – коэффициент трансформации трансформатора;
U2Ф
I1н = I2нФ – номинальный первичный ток трансформатора;
kтр
сопротивление сглаживающего и уравнительных дросселей
R |
= |
∆Uс др |
; |
R |
= |
∆Uу др |
, |
|
|
||||||
с др |
|
Idн |
у др |
|
Idн |
||
|
|
|
|
||||
где ∆Uс др = ∆Uу др (0,005...0,01)Udн |
– падение напряжения на |
||||||
сглаживающем и уравнительных дросселях при номинальном выпрямленном токе Idн преобразователя.
В случае безтрансформаторной схемы преобразователя (с ТОР) Rэ определяется по формуле
Rэ = m Xр + 2Rр + Rя∑ + Rс др + 2Rу др,
2π
где Xр и Rр – индуктивное и активное сопротивления токоограничивающего реактора, причем Xр = 2ω1 Lн, где ω1 = 2πf1н .
Статические механические характеристики рассчитываются по уравнению
16
Стр. 16 |
ЭБ ПНИПУ (elib.pstu.ru) |

|
|
|
|
|
|
ω = |
Ed 0 cosαi |
|
− |
Rэ |
М, |
||
|
|
|
|
|
|
|
kФ |
|
(kФ)2 |
||||
где E |
|
= |
2 и |
|
т |
sin |
π |
= 2,34и |
|
|
при m = 6. |
||
|
π |
|
|
|
|||||||||
|
d 0 |
|
1л |
|
|
m |
2Ф |
|
|
||||
Угол задержки открывания вентилей αi, необходимый для обеспечения работы двигателя с установившейся скоростью ωci
|
|
|
αi |
= arccos |
udi |
= arccos |
kФωci + Ici Rэ |
, |
|
|
|
|
Ed 0 |
|
|||||
|
|
|
|
|
|
Ed 0 |
|||
где Ici |
= |
Mc'i |
– ток статической нагрузки, которому соответствует |
||||||
kФ |
|||||||||
|
|
|
|
|
|
|
|
||
приведенный момент Mc'i . Он находится по характеристике ω =
f(Мс) при данной ωci
Если преобразователь системы ТП–Д нереверсивный (с одним комплектом вентилей) или реверсивный (с двумя комплектами вентилей), но управление комплектами раздельное, при малых нагрузках ток будет прерывистым, т.е. возникнет зона прерывистых токов. В этой зоне механические характеристики нелинейны. Они отсекают на оси ординат точки, соответствующие скорости идеального холостого хода
' |
|
E2фмакс |
|
π |
' |
|
E2ф макс |
|
π |
|
ω0 |
= |
|
при 0 < αi < |
|
и ω0 |
= |
|
при αi < |
|
, |
kФ |
m |
kФ |
m |
где Е2ф макс – амплитуда фазной ЭДС вторичной обмотки питающего трансформатора (принять Е2ф макс = u2ф макс).
В случае бестрансформаторной схемы, когда двигатель выбран на Uн = 440 В, Е2ф макс – это амплитуда фазного напряжения питающей сети.
Для расчета зоны прерывистых токов находится граничный ток по формулам
Id гр i |
= |
Ed 0 sin αi |
1 |
− |
π |
ctg |
π |
|
или Id гр i = |
0,126 и2л |
sin αi , |
|
|
|
|
||||||||
|
|
xтр + 2πf1Ld |
|
m |
m |
|
2xтр + 2πf1Ld |
||||
|
|
|
|
|
|
|
|
|
|
17 |
|
Стр. 17 |
ЭБ ПНИПУ (elib.pstu.ru) |
где Ld – индуктивность якорной цепи, вводимая в эту цепь для ограничения зоны прерывистых токов. При мостовой схеме преобразователя
|
|
|
|
|
1 |
|
|
u |
2 |
л |
sin α |
|
|
|
|
I |
|
= L |
+ L |
= |
|
0,126 |
|
|
|
− 2x |
, |
||||
|
2πf |
I |
|
|
|
|
|||||||||
|
d |
я∑ |
с др |
|
|
|
d гр |
|
и |
|
тр |
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||
где Id гр – начально-непрерывный ток якоря двигателя при максимальном угле регулирования. При расчетах принять равным 0,9 тока холостогоходадвигателя.
Статические механические характеристики в системе ТПЧ–АД необходимо рассчитать для следующих случаев:
а) при пропорциальном законе регулирования напряжения; б) при компенсации падения напряжения на активном сопро-
тивлении обмотки статора; в) при компенсации падения напряжения на полном сопротив-
лении обмотки статора.
По данным расчетов строятся семейства этих характеристик ω = f(M), причем для сравнения их следует построить в одних координатных осях.
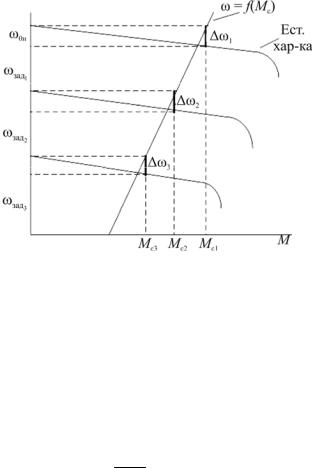
Основные технические данные к.з. асинхронных двигателей, механические характеристики частотно-регулируемого электропривода которых следует рассчитать, приведены в табл. П2 и П3. Предварительно необходимо определить синхронные скорости и частоты напряжения на выходе ТПЧ, обеспечивающие работу электропривода с заданными установившимися скоростями. Для этого находится падение скорости ∆ω, при работе с заданной скоростью ω1 на естественной характеристике при частоте f1н = 50 Гц
(рис. 1). Это позволяет определить ее жесткость β = ∆M = ∆Mc1 .
∆ω ∆ω1
Зная ее, можно для каждой из характеристик определить
∆ωi = ∆Mβ c1 при соответствующих Mci и ωci . При сложении ∆ωci
с заданной скоростью ωсi находятся соответствующие синхронные скорости ω0i и необходимые частоты напряжения на выходе ТПЧ
18
Стр. 18 |
ЭБ ПНИПУ (elib.pstu.ru) |
f |
|
= f |
|
ω0i |
. |
|
|
|
|||||
|
i |
1н |
|
ω |
н |
|
|
|
|
|
0 |
||
Рис. 1. Статические механические характеристики при разных частотах
При расчете статических механических характеристик используется уравнение электромагнитного момента
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
М = |
m1 u1 |
|
|
|
|
|
|
υ1 |
|
|
|
|
|
|
|
|
|
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ω |
|
|
|
+ (b |
2 |
2 |
2 |
) |
S |
a |
+ (d |
2 |
2 |
2 |
) |
r' |
|
|
|
0 |
н |
|
2r1ϕ1 |
|
+ c |
ϕ1 |
|
|
+ e |
ϕ1 |
2 |
|
|
|
||||||
|
|
|
|
' |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
Sa |
|
|||
где m1 = 3 – число фаз напряжения двигателя; U1ф – номинальное
фазное напряжение; ω0н = 2πf1н – синхронная скорость при номи-
рп
нальной частоте; |
Sa |
= |
ω0 − ω – абсолютное скольжение; |
|
|
||||||||
|
|
|
|
|
|
ω0н |
|
|
|
|
|
|
|
|
|
|
x' |
|
|
x x' |
r |
|
x |
||||
b = r1 |
1 |
+ |
2 |
|
; |
с = x1 + x2' + |
1 2 |
; d = |
1 |
; |
е = 1+ |
1 |
; |
x |
|
|
|
||||||||||
|
|
|
|
|
x |
x |
|
x |
|||||
|
|
|
|
|
|
|
|
|
|
||||
19
Стр. 19 |
ЭБ ПНИПУ (elib.pstu.ru) |

υ1 – относительное напряжение |
|
u1 |
. |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1н |
|
|
|
|
|
|
|
|
|
|
При пропорциональном законе регулирования |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
f1 |
= |
u1 |
|
= ϕ1 = υ1 = 1, |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
f1н |
|
|
|
u1н |
|
|
|
|
|
|
|
|
|
|
|
|
|||
уравнение момента принимает вид |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
u2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
М = |
1 |
|
1 ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ1 |
|
|
|
|
|
|
. |
||
ω |
|
2r |
|
|
b2 |
|
|
|
S |
|
d 2 |
|
r' |
|
||||||||||||||
|
|
|
|
|
|
|
|
a |
|
|
||||||||||||||||||
|
|
|
|
0н |
|
1 |
|
+ |
|
|
+ c2 |
|
+ |
|
+ e2 |
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
ϕ1 |
|
|
2 |
|
' |
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ϕ1 |
|
|
|
r2 |
|
ϕ1 |
|
Sa |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Задаваясь значениями Sa от 0 до 1, при найденных ранее часто- |
||||||||||||||||||||||||||||
тах ϕ1 = |
f1 |
, |
ϕ2 |
= |
f2 |
, |
|
ϕ3 |
= |
f3 |
|
|
рассчитываем семейство механиче- |
|||||||||||||||
|
f1н |
|
f1н |
|
|
|||||||||||||||||||||||
|
f1н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ских характеристик. Результаты расчетов сводятся в таблицу, на основе которой строится семейство характеристик.
При компенсации падения напряжения на активном сопротивлении обмотки статора r1 = 0; b = 0; d = 0 и формула момента принимает вид
|
m |
u2 |
υ2 |
|
|
|
||||
М = |
|
1 |
|
|
1ф |
1 |
|
|
. |
|
|
|
|
S |
a |
|
|
r' |
|
||
|
ω0н c2 |
ϕ12 |
|
|
|
+ e2ϕ12 |
2 |
|
||
|
|
|
' |
|
||||||
|
|
|
|
r2 |
|
Sa |
||||
В этом случае при регулировании по пропорцианальному закону напряжение U1ф, подаваемое на обмотку статора при f1i < f1н, равно U'1ф. Величина его находится из того условия, что при φ1 = 1 ω = ωн (момент равен номинальному).
' |
ω |
|
М |
|
2 |
|
S |
н |
|
2 |
|
r' |
|
U1ф = |
0 |
н |
|
н c |
|
|
+ e |
|
2 |
, |
|||
|
3 |
|
|
' |
|
|
|||||||
|
|
|
|
|
|
r2 |
|
|
|
Sн |
|||
20
Стр. 20 |
ЭБ ПНИПУ (elib.pstu.ru) |