

Типовые планетарные механизмы
|
№ |
Структурная схема механизма |
Uред |
КПД |
|
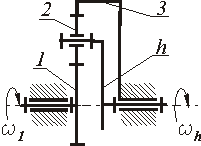
1 |
|
3....10 |
0.97....0.99 |
|
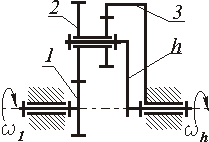
2 |
|
7....16 |
0.96....0.98 |
|
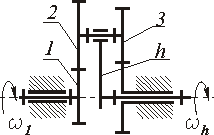
3 |
|
25....30 |
0.9....0.3 |
|
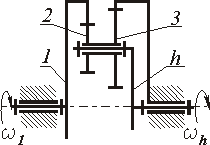
4 |
|
30....300 |
0.9....0.3 |
Формула Виллиса
Формула Виллиса выводится на основании основной теоремы зацепления и устанавливает соотношение между угловыми скоростями зубчатых колес в планетарном механизме. Рассмотрим простейший планетарный механизм с одним внешним и одним внутренним зацеплением. Всему механизму сообщается угловая скорость равная по величине и противоположна по направлению угловой скорости водила, при этом водило остановится, а опорное колесо начнет поворачиваться. Таким образом, планетарный механизм превратится в механизм с неподвижными осями, состоящий из нескольких последовательно соединенных зубчатых колес. Такой механизм носит название обращенного механизма.
Угловые скорости звеньев в каждом из рассматриваемых движений приведены в таблице
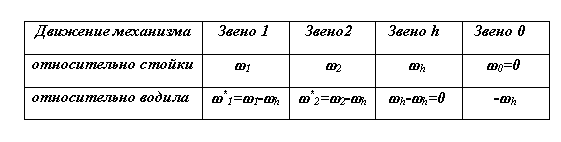
В движении звеньев относительно водила угловые скорости звеньев равны угловым скоростям в движении относительно стойки минус угловая скорость водила. Если в движении относительно стойки ось сателлита подвижна, то в движении относительно водила оси обоих зубчатых колес неподвижны. Поэтому к движению относительно водила можно применить основную теорему зацепления.
Передаточное отношение обращенного
механизма
 ,
окончательно передаточное отношение
планетарного редуктора может быть
определено по формуле Виллиса:
,
окончательно передаточное отношение
планетарного редуктора может быть
определено по формуле Виллиса:![]()
Передаточное отношение планетарного редуктора от любого колеса к водилу равно единице минус передаточное отношение обращенного механизма от этого колеса к опорному.
Кинематическое исследование типовых планетарных механизмов графическим и аналитическим методами
1. Двухрядный механизм с одним внутренним и одним внешним зацеплением.
Дано:
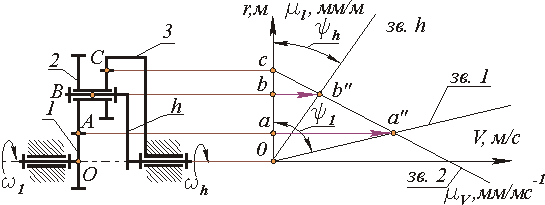
Кинематическая схема механизма
![]() числа
зубьев колес
числа
зубьев колес![]() ;
;
Определить: Передаточное отношение механизма.
Аналитическое определение передаточного отношения.
Заданный планетарный механизм с одним внешним и одним внутренним зацеплениями зубчатых колес. Применяем метод обращенного движения.
Аналитическое определение передаточного отношения основывается на формуле:
 ,
,
так как колеса 2-3 находятся на одном валу, соответственно вращаются с одинаковой угловой скоростью.
Используя основную теорему Виллиса, для заданного обращенного механизма получим:

По формуле Виллиса
![]()
Графическое определение передаточного отношения.
В системе координат
![]() построим
треугольники распределения линейных
скоростей звеньев.
построим
треугольники распределения линейных
скоростей звеньев.
Для чего
на схеме редуктора отмечаются характерные точки; центра колес и точки зацеплений, которые выносятся на вертикальную ось радиусов. Вычисляется скорость первого колеса
 (или водила
(или водила ).
).в произвольном масштабе
 откладываем отрезок
откладываем отрезок ,
выражающий в масштабе
,
выражающий в масштабе скорость точки
скорость точки .
Через конец этого отрезка и начало
координат проведем прямую, которая
определит распределение скоростей для
точек звена, лежащих на оси
.
Через конец этого отрезка и начало
координат проведем прямую, которая
определит распределение скоростей для
точек звена, лежащих на оси .Эта прямая образует с осью
.Эта прямая образует с осью угол
угол .
Отрезок
.
Отрезок – линия распределения скоростей первого
звена (лрс 1).
– линия распределения скоростей первого
звена (лрс 1).Так как в точке
 скорость
скорость ,
строим линию распределения скоростей
блока сателлитов (лрс бл.с.), соединяя
точку
,
строим линию распределения скоростей
блока сателлитов (лрс бл.с.), соединяя
точку и
и .
.Строим отрезок
 для радиуса
для радиуса ,
выражающий в масштабе
,
выражающий в масштабе скорость точки
скорость точки .
Отрезок
.
Отрезок – линия распределения скоростей водила
(лрсв).
– линия распределения скоростей водила
(лрсв).Обозначим точку пересечения скорости точки
 первого колеса с лрсв
первого колеса с лрсв
![]() ,
,
![]() ,
,
![]() ,
,
 .
.