

|
|
ЛЕКЦИЯ 14 |
|
Кинематика планетарных механизмов
Краткое содержание: Многозвенные зубчатые механизмы. Кинематика рядового зубчатого механизма. Кинематика ступенчатого механизма. Формула Виллиса для планетарных механизмов. Кинематическое исследование типовых планетарных механизмов графическим и аналитическим методами.
![]()
Многозвенные зубчатые механизмы
При проектировании зубчатых механизмов многих машин и приборов (манипуляторов, станков, автомобилей, летательных аппаратов, индикаторов, тахометров, печатающих устройств ЭВМ и др.) возникает необходимость обеспечить передачу вращения с большим передаточным отношением или при значительных межосевых расстояниях. В таких случаях применяют многозвенные зубчатые механизмы либо снижающие скорость вращения выходного вала по сравнению с входным — редукторы, либо повышающие ее — мультипликаторы.
Многозвенные зубчатые механизмы могут быть как плоскими, так и пространственными. Они подразделяются на два основных вида:
зубчатые механизмы с неподвижными осями всех колес;
зубчатые механизмы, оси отдельных колес которых перемещаются относительно стойки.
К первому виду механизмов относятся
рядовые (с развернутой схемой) и
ступенчатые зубчатые механизмы,
подвижность таких механизмов
![]() .
Ко второму виду относятся планетарные
.
Ко второму виду относятся планетарные![]() ,
дифференциальные
,
дифференциальные![]() ,
замкнутые дифференциальные
,
замкнутые дифференциальные![]() и волновые зубчатые механизмы. Большим
достоинством механизмов второго вида
является их компактность. Проектирование
многозвенных зубчатых механизмов
включает два этапа: выбор структурной
схемы; определение чисел зубьев для
воспроизведения заданного передаточного
отношения.
и волновые зубчатые механизмы. Большим
достоинством механизмов второго вида
является их компактность. Проектирование
многозвенных зубчатых механизмов
включает два этапа: выбор структурной
схемы; определение чисел зубьев для
воспроизведения заданного передаточного
отношения.
Общее передаточное отношение многозвенного механизма равно произведению передаточных отношений отдельных механизмов (ступеней), последовательно включенных в его состав
Кинематика рядового зубчатого механизма
Рядовым зубчатым механизмомназывается сложный зубчатый механизм с неподвижными осями колес, образованный последовательным соединением нескольких пар единичных зубчатых колес. Имея схему передачи и числа зубьев или радиусы начальных окружностей колес можно определить общее передаточное отношение такого редуктора аналитически или графически. (Для колес без смещения, которые обычно используют в редукторах, начальные окружности совпадают с делительными; для колес со смещением -
![]() ).
).
Рассмотрим кинематику рядового механизма составленного из трех зубчатых передач внешнего зацепления. Схема механизма изображена на рис.
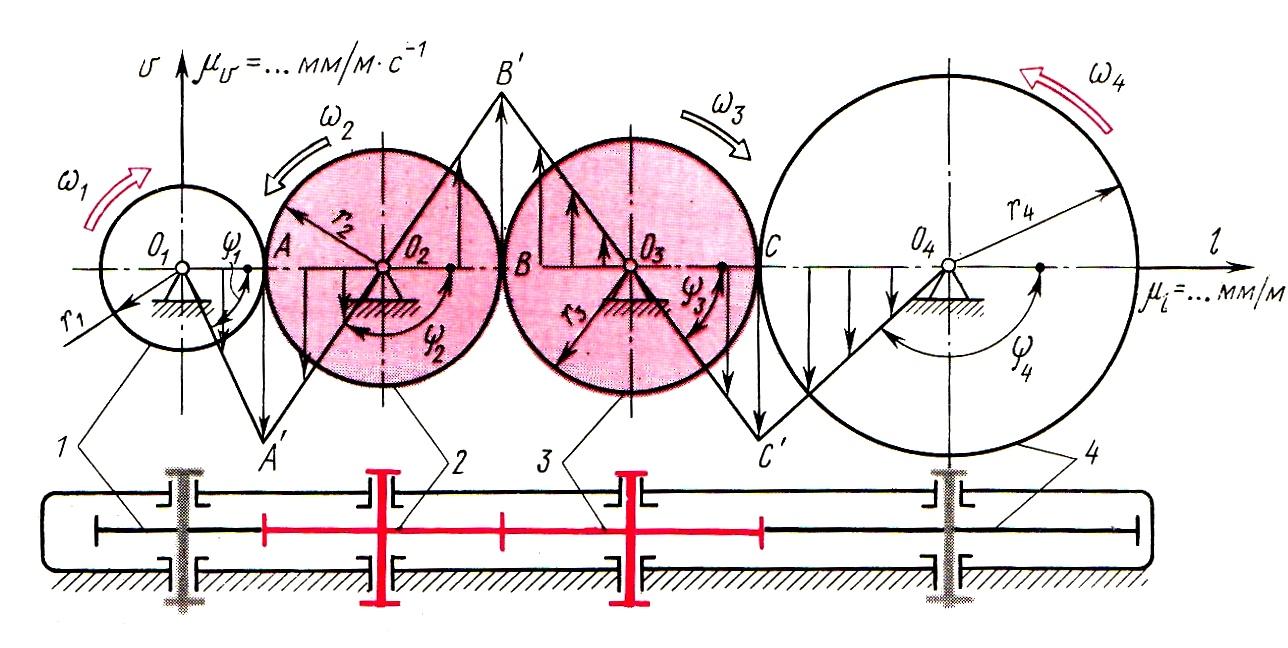
Аналитическое определение передаточного отношения
Аналитическое определение передаточного отношения основывается на формуле:
![]()
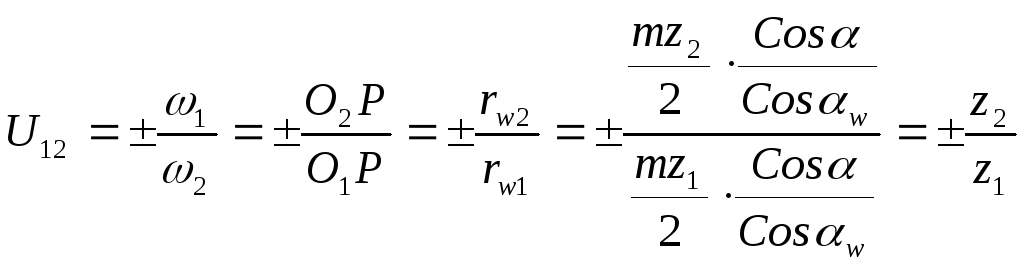 ,
где знак «+» соответствует внешнему
зацеплению зубчатых колес, а знак «-»
внутреннему.
,
где знак «+» соответствует внешнему
зацеплению зубчатых колес, а знак «-»
внутреннему.
Таким образом, для приведенного механизма получим:
![]()
На основе чего можно получить общую формулу для определения передаточного отношения рядового редуктора:
![]() .
.
Общее передаточное отношение рядового
зубчатого механизма постоянно и равно
обратному отношению чисел зубьев или
радиусов крайних колес. Знак передаточного
отношения определяется множителем
![]() ,
где
,
где![]() - число передач внешнего зацепления.
- число передач внешнего зацепления.