

Экология и научно-технический прогресс. Урбанистика
.pdfУДК 625.08: 51-74
И.С. Тюремнов, А.С. Морев, И.С. Филатов, А.А. Новичихин, И.Н. Федотова
К ВОПРОСУ ОБ ОПРЕДЕЛЕНИИ ЧИСЛЕННЫХ ЗНАЧЕНИЙ КОЭФФИЦИЕНТОВ УПРУГОГО И ВЯЗКОГО СОПРОТИВЛЕНИЯ ГРУНТА ПРИ РЕОЛОГИЧЕСКОМ МОДЕЛИРОВАНИИ
Описан подход к определению численных значений коэффициентов упругого и вязкого сопротивления грунта, используемых при реологическом моделировании взаимодействия с грунтом рабочих органов грунтоуплотняющих машин. Представлена общая методология определения значений коэффициентов. Приведены некоторые экспериментальные данные.
Ключевые слова: грунт, уплотнение, вибрация, трамбование, коэффициент упругого сопротивления грунта, коэффициент вязкого сопротивления грунта, стенд экспериментальный, система измерительная, коэффициент уплотнения, модель математическая, моделирование реологическое.
I.S. Tyuremnov, A.S. Morev, I.S. Filatov,
A.A. Novichihin, I.N. Fedotova
TO THE QUESTION ABOUT THE DETERMINATION OF THE SOIL STIFFNESS AND SOIL DAMPING NUMERICAL VALUE FOR RHEOLOGICAL MODELING
This article presents the method of determination of the soil stiffness and soil damping numerical value for rheological modeling. The methodology of the determination is described. Some experimental results are presented.
Keywords: soil, compaction, vibration, tamping, soil stiffness, soil damping, experimental stand, measurement system, compaction ratio, soil properties, mathematical model, rheological model.
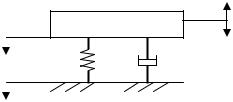
Реологическое моделирование получило широкое распространение при исследовании взаимодействия с грунтом рабочих органов грунтоуплотняющих машин вибрационного, виброударного и ударного действия [1]. Одной из наиболее простых и распространенных реологических схем являетсямодельФойгта, представляющаясобойпараллельноесоединение элементовупругогоивязкогосопротивления(рис. 1) [2].
381
|
M |
x1 |
Psin(ωt) |
с |
b |
x2 |
|
Рис. 1. Реологическая модель Фойгта
Однако адекватность отображения реологической моделью процессов изменения напряженно-деформированного состояния грунта при действии динамической поверхностной нагрузки [3–4] будет во многом определяться обоснованностью выбора численных значений элементов, используемых в реологической модели. Для модели Фойгта (см. рис. 1) ими будут являться элемент упругого сопротивления грунта (пружина жесткостью с) и элемент вязкого сопротивления грунта (демпфер с коэффициентом вязкого сопротивления b).
Особенностью уплотнения грунтов является зависимость механических свойств грунта от его вида (песок, супесь, суглинок, глина и их разновидностей) и состояния (текущая плотность и влажность). Причем плотность грунта в процессе уплотнения меняется от прохода к проходу уплотняющей машины (или от удара к удару трамбующей машины). В то же время обзор исследований отечественных и зарубежных авторов показал, что обоснованию численных значений коэффициентов упругого и вязкого сопротивления грунта уделяется недостаточно внимания. Таким образом, актуальной становиться задача определения зависимости численных значений коэффициентов упругого и вязкого сопротивления грунта от изменения реальных свойств грунта (его вида, плотности и влажности).
Для решения задачи предлагается следующая методология. Грунт нагружается одиночным ударом круглого плоского штампа с установленным на нём акселерометром. Акселерометр регистрирует ускорения в процессе удара штампа по грунту заданного вида с известными свойствами. В среде MATLAB (приложение Simulink) создается реологическая модель удара штампа с такими же характеристиками (массы, диаметра основания и высоты сбрасывания) по грунту, моделируемому схемой Фойгта. Подбором значений коэффициентов
382
упругого (с) и вязкого (b) сопротивления грунта реологической модели в среде MATLAB обеспечивается минимальное расхождение характеристик (амплитуды и длительности) экспериментально замеренных ускорений при одиночном ударе с рассчитанными по реологической модели. Полученные, таким образом, значения коэффициентов упругого и вязкого сопротивления грунта, минимизирующие расхождения с экспериментальными данными, будут соответствовать данному виду грунта с данными значениями плотности (характеризуемой коэффициентом уплотнения Ку) и влажности W. Проводя испытания для различных видов грунта при различных значениях Ку и W, можно обосновать численные значения коэффициентов упругого и вязкого сопротивления грунта для различных технологических и грунтовых условий произвоства работ.
Для реализации данной методологии был разработан план экспериментальных исследований на большом грунтовом канале кафедры «Строительные и дорожные машины» ЯГТУ (длина 11 м, ширина 1,3 м и глубина 1,5 м). В качестве грунта была использована супесь со значениями оптимальной влажности W0 = 9,94 % и максимальной стандартной плотности ст = 1,920 кг/м3. В грунтовом канале выделялись три участка, уплотненных ручными трамбовками до различных исходных коэффициентов уплотнения. На каждом участке производилось три сбрасывания штампа без перекрытия следов от предыдущих ударов (рис. 2). Масса штампа составляла 8,045 кг, диаметр основания 0,25 м, высота сбрасывания 0,2 м. Перед ударами обеспечивалась горизонтальность основания подвешенного штампа, а также ровность и горизонтальность поверхности грунта. Все удары штампом наносились с одинаковой высоты. После нанесения ударов на каждом участке методом режущих колец определялся коэффициент уплотнения грунта на поверхности и на глубине 20 см, а затем полученные значения усреднялись. После проведения испытаний грунт увлажнялся, перекапывался, и опыты повторялись при новом значении влажности.
Высокочувствительный акселерометр АР-49 пьезоэлектрического типа устанавливался по оси штампа. Показания акселерометра усиливались усилителем LE-41 и регистрировались аналоговоцифровым преобразователем E14-140(M) [5]. Для визуализации показаний акселерометра и послесеансной обработки данных использовалась программа LGraph 2 фирмы L-Card.
383

Рис. 2. Проведение экспериментов на большом грунтовом канале на кафедре «Строительные и дорожные машины» ЯГТУ
В процессе обработки результатов эксперимента определялись амплитудные значения ускорений удара а1 и продолжительность их действия t (рис. 3).
Рис. 3. Определение амплитудных значений ускорений удара а1
ипродолжительность их действия t
Врезультате обработки экспериментальных данных (рис. 4, 5) было выявлено наличие зависимости амплитудных значений ускорений удара от коэффициента уплотнения грунта. Влияние на амплитудные значе-
384

ния ускорений удара влажности грунта требует дополнительного изучения. Продолжительность действия ускорений при ударе существенно зависит от влажности грунта. Влияние на продолжительность действия ускорений при ударе коэффициента уплотнения грунта требует дополнительного изучения. Анализ полученных результатов позволяет сделать предварительный вывод о зависимости значений коэффициента упругого сопротивления с преимущественно от коэффициента уплотнения грунта, акоэффициентавязкогосопротивленияb отвлажностигрунта.
Рис. 4. Зависимость амплитудных значений ускорений удара а1 от коэффициента уплотнения и влажности грунта
Рис. 5. Зависимость продолжительности действия ускорений при ударе t от коэффициента уплотнения и влажности грунта
385
Однако обнаруженные в процессе обработки результатов эксперимента особенности функционирования измерительной системы не позволили получить численные значения амплитудных значений ускорений удара а1 и продолжительность их действия t во всем диапазоне изменения свойств грунта. После внесения изменений в измерительную систему и с учетом полученного опыта планируется повторение эксперимента. Также в процессе отработки находится и реологическая модель одиночного удара в среде MATLAB (приложение Simulink).
Список литературы
1.Тюремнов И.С., Игнатьев А.А. Уплотнение грунтов вибрационными катками: моногр. – Ярославль: Изд-во Ярослав. гос. техн.
ун-та, 2012. – 140 с.
2.Тюремнов И.С., Филатов И.С., Морев А.С. Реологическая модель взаимодействия вибровальца катка с уплотняемым грунтом //
Мир дорог. – 2012. – № 59 (март). – С. 86–88.
3.Разработка математической модели функционирования системы непрерывного контроля уплотнения грунта вибрационным катком / И.С. Тюремнов, А.С. Морев, Е.Ф. Скурыгин, И.С. Филатов // Экология
инаучно-технический прогресс. Урбанистика: материалы ХI Всерос. на- уч.-практ. конф. студентов, аспирантов и молодых ученых (с международным участием), г. Пермь, 14–15 ноября 2013 г. – Пермь: Изд-во Перм.
нац. исслед. политехн. ун-та, 2014. – Т. 2. – С. 427–436.
4.Тюремнов И.С., Филатов И.С., Морев А.С. Теоретическое определение составляющих времени взаимодействия вальца вибрационного катка с уплотняемым грунтом // Экология и научнотехнический прогресс. Урбанистика: материалы ХI Всерос. науч.- практ. конф. студентов, аспирантов и молодых ученых (с международным участием), г. Пермь, 14–15 ноября 2013 г. – Пермь: Изд-во Перм.
нац. исслед. политехн. ун-та, 2014. – Т. 2. – С. 444–455.
5.Экспериментальный стенд для исследования уплотнения грунтов вибрационными машинами / И.С. Тюремнов, А.С. Морев, И.С. Филатов, А.А. Новичихин // Экология и научно-технический прогресс. Урбанистика: материалы ХI Всерос. науч.-практ. конф. студен-
тов, аспирантов и молодых ученых (с международным участием), г. Пермь, 14–15 ноября 2013 г. – Пермь: Изд-воПерм. нац. исслед. поли-
техн. ун-та, 2014. – Т. 2. – С. 437–443.
386
Сведения об авторах
Тюремнов Иван Сергеевич – кандидат технических наук, доцент, Ярославский государственный технический университет, е-mail: tyuremnovis@ystu.ru.
Морев Артем Сергеевич – аспирант, Ярославский государственный технический университет, е-mail: MAS761990@gmail.com.
Филатов Иван Сергеевич – аспирант, Ярославский государственный технический университет, е-mail: filatovis@ystu.ru.
Новичихин Александр Анатольевич – аспирант, Ярославский государственный технический университет, е-mail: alexnovichikhin@ yandex.ru.
Федотова Ирина Николаевна – студентка, Ярославский государственный технический университет, е-mail: fedotovain@mail.ru.
387
УДК 621.865.8
А.Г. Федотов, Е.В. Поезжаева, П.В. Заглядов
БЕЗОПАСНОСТЬ ТРУДА ПРИ ВЗАИМОДЕЙСТВИИ С ПРОМЫШЛЕННЫМИ РОБОТАМИ
Расширение сферы применения ПР, их возрастающий искусственный интеллект не уменьшают актуальность проблем обеспечения безопасности труда. Рассмотрена система технического зрения, выделены основные причины аварийной ситуации и требования, предъявляемые к безопасности труда.
Ключевые слова: промышленный робот, безопасность труда, система технического зрения.
A.G. Fedotov, E.V. Pojezjaeva, P.V. Zaglaudov
SAFETY WHEN INTERACTING WITH INDUSTRIAL ROBOTS
The extension of the scope of the RP, their increasing artificial intelligence does not reduce the urgency of the problems of safety. Considered the vision system, highlighted the main reasons for emergency and requirements for safety.
Keywords: industrial robot safety, the vision system.
Приведем определение промышленных роботов (ПР): автоматический манипулятор, осуществляющий перепрограммируемые перемещения в пространстве, многофункциональный, способный выполнять обработку и ориентацию материалов, деталей, инструментов или специализированных устройств в процессе разнообразных перемещений, предназначенный для достижения разнообразных целей, в состав входят одна или несколько рук, на концах которых имеется схват. Управляющая система ПР включает в себя запоминающее устройство (ЗУ) и при необходимости устройства для восприятия различной информации об условиях окружающей среды с целью адаптации. Эти многофункциональные устройства разработаны главным образом для выполнения в виде повторяющихся циклов заданной функции и могут быть перестроены для выполнения другихфункцийбезсущественноймодификацииустройства.
Основными причинами опасных, критических и аварийных ситуации, возникающих при эксплуатации ПР, являются:
388
1)непредусмотренные движения исполнительных устройств промышленных роботов при наладке, ремонте, во время обучения
иисполнения управляющей программы;
2)внезапный отказ в работе промышленного робота или технологического оборудования, совместно с которым он работает;
3)ошибочные (непреднамеренные) действия оператора или наладчика во время наладки и ремонта, при работе в автоматическом режиме;
4)доступ человека в рабочее пространство робота, функционирующего в режиме исполнения программы;
5)нарушение условий эксплуатации промышленного робота, роботизированного технологического комплекса;
6)нарушение требований эргономики и безопасности труда
при планировке роботизированного технологического комплекса и участка (размещение технологического оборудования, промышленных роботов, пультов управления, загрузочных и разгрузочных устройств, накопителей, тары, транспортных средств и других средств технологического оснащения) [1].
На безопасность оказывают влияние следующие факторы: изменяемое число степеней подвижности, свободная программируемость направлений перемещения, свободная программируемость скоростей. Стоит отметить основные виды опасности для здоровья и жизни обслуживающего персонала: механические повреждения, электротравмы, ожоги, химические травмы. Требования безопасности следует учитывать уже на этапе проектирования таких элементов, как схваты, руки, узлы сочленения, это особенно важно при значительности перемещаемых масс и скоростей. Необходимо предусматривать специальные устройства торможения (демпфирования) в условиях значительных изменений нагружения, специальные меры выравнивания перемещаемых масс при значительных динамических нагрузках. В систему программирования и управления необходимо встраивать специальные диагностирующие средства и алгоритмы. Для обеспечения безопасности требуется использовать средства механической защиты в виде средств ограждения рабочей зоны ПР, специальные датчики, фиксирующие направление, наличие посторонних предметов в рабочей зоне. Электрокабели должны иметь покрытие, устойчивое к воздействию агрессивных сред, штепсельные разъемы должны быть гер-
389

метичны. Также необходимо проводить анализ работы ПР в составе автоматизированных линий с целью выявления так называемой «скрытой» опасности, которая может возникнуть при совместной работе ПР с элементами автоматической линии [2, 4].
Мы предлагаем большее внимание уделять вопросам использования в промышленности различных сенсорных систем, в частности систем технического зрения (СТЗ). Типичными задачами, требующими зрительного очувствления, являются зрительная инспекция продукции, контроль и управление процессами, робототехнические задачи, связанные с манипулированием заготовками, автоматизированной сборкой (рисунок).
Рис. Взаимосвязь различных областей применения и задач зрительных систем в производстве
Применение СТЗ особенно перспективно там, где возможности человеческого глаза (быстродействие, точность, надежность, объективность и т.д.) оказываются недостаточными, где технические и организационные альтернативыприводяткзначительнобольшимзатратам.
В области манипулирования деталями и автоматизированной сборки можно выделить две группы задач:
1)измерение относительного смещения (инструмент – деталь, деталь – деталь) неточно позиционируемых объектов (например, деталей
впаллетах) илиопределениегеометрическихпараметровформыдетали;
2)распознавание деталей и определение их положения. Измерение смещения производится при автоматической сборке
узлов.
390