

Технические измерения и приборы
..pdfОрганизационное |
Оперативный |
обеспечение |
персонал |
Входная Информационное Выходная информация обеспечение информация
Техническое |
Программное |
обеспечение ЭВМ |
обеспечение |
Метрологическое обеспечение
Рис. 3.2. Основные компоненты измерительных информационных систем
Математическое обеспечение – модели и вычислительные ал-
горитмы.
Программное обеспечение – программы, реализующие вычислительные алгоритмы и алгоритмы функционирования системы, охватывает круг решений, связанных с разработкой и эксплуатацией программ.
Информационное обеспечение – документы, диаграммы, графи-
ки, сигналы для их предоставления оперативному персоналу и ЭВМ для дальнейшего использования, определяющие способы и конкретные формы информационного отображения состояния объекта.
Математическое, программное и информационное обеспечение входит только в состав систем с цифровым вычислительным комплексом.
Метрологическое обеспечение – комплекс компонентов (рис. 3.2),
охватывает всю систему в целом.
Комплекс технических средств ИИС состоит из следующих блоков:
1) множества первичных измерительных преобразователей (датчики);
71
2)множества вторичных измерительных преобразователей;
3)множества элементов сравнения и мер;
4)блока цифровых устройств;
5)множества элементов описания – норм;
6)множества преобразователей сигнала, средств отображения, памяти и др.
Все блоки могут быть использованы в цифровых системах, в аналоговых системах исключаются блоки 4 и 5.
3.2.ВИДЫ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
3.2.1. Измерительные системы
Измерительная система (ИС) – разновидность информационноизмерительных систем, предназначенная для получения, обработки и хранения информации.
Измерительные системы могут быть ближнего или дальнего действия. На вход системы поступает множество изменяющихся во времени и/или распределенных в пространстве величин.
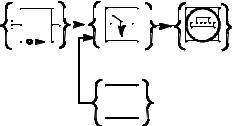
Наиболее распространены системы для прямых измерений, обобщенная структура которой представлена на рис. 3.3.
Для всех ИС основными элементами являются первичные преобразователи {Д}, элементы сравнения {С}, меры {М} и элементы отображения информации {В}.
|
|
(Д) |
|
|
|
|
|
|
|
|
(С) |
|
|
|
|
|
|
|
(В) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 (М)
(М) 

Рис. 3.3. Обобщенная структура измерительной системы для прямых измерений
72
Важнейшие характеристики ИС – эффективность, полнота вы-
полняемых функций, достоверность, надежность, быстродействие, характеристики входов и выходов, метрологические параметры.
3.2.1.1. Многоканальные ИС
Многоканальные ИС параллельного действия – один из наибо-
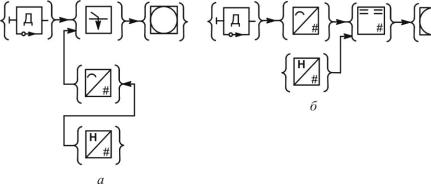
лее распространенных видов ИИС, обладающих наиболее высокой надежностью и более высоким быстродействием при одновременном получении информации, возможностью подбора средств измерений к замеряемым величинам, что позволяет исключить обязательную унификацию сигналов. Такие системы отличаются повышенной сложностью и стоимостью. Структурные схемы измерительных систем параллельного действия с цифровой нормой показаны на рис. 3.4, а, б.
Рис. 3.4. Структурная схема многоканальной измерительной схемы:
а– сравнение величин в аналоговом виде;
б– сравнение величин в цифровом виде
3.2.1.2. Сканирующие ИС
Сканирующие ИС выполняют последовательно измерения множества величин с помощью одного канала, В состав системы входит сканирующее устройство (СкУ), которое перемещает датчик в пространстве (рис. 3.5).
73
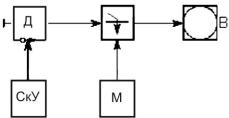
Рис. 3.5. Структурная схема сканирующей измерительной системы
Различают два способа сканирования – пассивное и активное. Пассивное сканирование – движение по заранее заданной тра-
ектории.
Активное сканирование – траектория изменяться в зависимости от результатов измерения.
Примеры применения сканирующих систем – измерение температурных полей, нахождение экстремальных значений исследуемых полей (давлений, механических напряжений), нахождение одинаковых значений параметра. Недостаток систем – малое быстродействие.
3.2.1.3. ИС параллельно-последовательного действия (многоточечные)
Многоточечные ИС применяют в сложных объектах с большим числом измеряемых параметров (рис. 3.6).
В этих системах при множестве датчиков {Дi} имеется либо один измерительный тракт (см. рис. 3.6, а) и измерительный коммутатор SW, либо множество датчиков {Дi} и множество вторичных приборов {Bi} (см. рис. 3.6, б).
Измерительные коммутаторы служат для согласования параллельных и последовательных элементов во времени. Они должны обладать определенными метрологическими характеристиками (погрешностью, быстродействием).
Контактные измерительные коммутаторы – лучшие показа-
тели по точности (10–5…10–6), но имеют низкое быстродействие, малое количество коммутируемых цепей и не работают по заявкам.
74
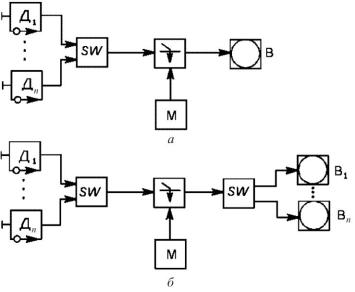
Рис. 3.6. Структурная схема многоточечной измерительной системы: а – с одним коммутатором; б – с двумя коммутаторами
Бесконтактные измерительные коммутаторы – имеют более низкую точность, погрешность составляет 10-3…10-4, но значительно лучшие остальные показатели.
К недостаткам многоточечных систем относят пониженное быстродействие и точность за счет использования коммутаторов.
3.2.2. Системы автоматического контроля
Автоматический контроль (автоконтроль) устанавливает соответствие между состоянием объекта контроля и заданной нормой без непосредственного участия человека. Соответствие может устанавливаться для текущего или для будущего состояния (прогнозирующий контроль).
При автоконтроле, в отличие от автоматических измерений, нет необходимости предоставлять численные значения контролируемых
75
величин, достаточно установить отклонение от нормы (например, не более 5 %). Отклонения за пределы установленной нормы вызывают предупредительный, аварийный или другие сигналы. Формирование таких сигналов – одна из главных функций систем автоматического контроля.
Система автоматического контроля – комплекс устройств,
осуществляющих автоматический контроль за одной или большим числом величин, что требует значительной обработки информации для формирования суждения об отклонении от установленной нормы.
Промышленные системы автоконтроля различают в зависи-
мости от того, что контролируется, – сырье, готовая продукция, процесс производства или процесс эксплуатации.
В реальных системах устанавливаемое допустимое отклонение от нормы, например, в процентах, во много раз больше погрешностей измерительных систем – 5…20 % вместо 0,2…2,5 %, поэтому информационная емкость систем автоконтроля соответственно меньше, т.е. по сравнению с измерительными системами в них имеет место «сжатие» информации. Если же допустимое относительное отклонение от нормы равно погрешности измерений, то «сжатия» информации нет.
Часто системы автоконтроля совмещают функции контроля и измерения, т.е. являются контрольно-измерительными системами. Они выполняют функции контроля, а в случае необходимости расширить информацию о контролируемом параметре осуществляют процесс измерения. Это необходимо учитывать при определении коэффициента «сжатия» информации.
Структурные схемы систем для автоматического контроля большого количества величин приведены на рис. 3.7.
Они похожи на схемы многоточечных измерительных систем. Здесь так же, как и на рис. 3.6, фигурные скобки обозначают наличие от 1 до n одинаковых узлов внутри скобок. На рис. 3.7 норма выражается в аналоговой форме. В отличие от рис. 3.6 в системах автоматического контроля на элемент сравнения подается не мера, а норма.
76
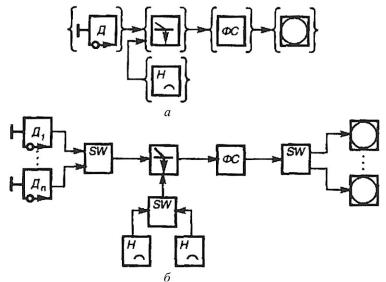
Рис. 3.7. Структурные схемы систем автоматического контроля с аналоговой нормой
Кроме того, на выходе сравнивающего устройства включено устройство формирования сигналов (ФС), формирующее сигнал отклонения от заданной нормы, который отображается и/или запоминается.
Схема может быть реализована с параллельным или последовательным сбором информации.
Впервом случае (см. рис. 3.7, а) схема содержит n параллельно работающих каналов автоконтроля с n датчиками, n элементами сравнения, n нормами (уставками), n узлами формирования сигналов и n устройствами отображения информации.
При последовательном сборе информации на выходе n датчиков
иn уставок и на входе n устройств отображения включаются коммутаторы, работающие синхронно и синфазно (см. рис. 3.7, б).
Всистемах автоконтроля, реализуемых по схеме рис. 3.7, норма должна храниться в аналоговой форме, что связано с техническими трудностями. Для устранения этого недостатка хранение нормы может осуществляться в цифровой форме, а между устрой-
77
ством хранения нормы и элементом сравнения включается ЦАП аналогично рис. 3.3, а.
Возможен и другой вариант хранения нормы в цифровой форме, но с АЦП на выходе датчиков и устройством сравнения в цифровой форме, например в виде дешифратора кодов (аналогично, см. рис. 3.3, б).
Системы автоматического контроля часто выполняют дополнительные функции, не имеющие прямого отношения к контролю. К ним относятся:
–промежуточные преобразования сигналов;
–формирование тестовых (испытательных) сигналов;
–операция счета (например, изделий);
–операция измерения;
–математическая обработка результатов контроля для прогнозирования и выполнения других операций;
–диагностические функции.
3.2.3. Системы технической диагностики
Техническая диагностика – автоматический поиск и локализация неисправностей, относятся к автоконтролю, так как при этом устанавливается соответствие между состоянием объекта контроля и заданной нормой. Однако в системах автоконтроля устанавливался только факт работоспособного и неработоспособного состояния, т.е. наличие параметров в границах нормы или за ее границами. В системах технической диагностики ставится более сложная задача – не только установить факт неработоспособности, но и найти местоположение отказа, т.е. локализовать неисправность. Это достигается специальными методами и способами поиска неисправностей, реализующимися алгоритмами диагностики.
Восстановление отказавшей системы или устройства в результате нахождения места повреждений достигается в современной аппаратуре заменой отказавшего модуля. Разделение на типовые модули упрощает поиск неисправностей и эксплуатацию аппаратуры.
78

Общее число возможных состояний объекта контроля S при разделении его на N функциональных элементов для принятых условий поиска определяется формулой
S 2N 1. |
(3.1) |
Определение такого большого числа состояний уже при N > 7 связано с техническими трудностями, поэтому ограничено предположением, что отказал только один из N функциональных элементов, т.е. ограничено одиночными отказами, число которых S0 = N.
Для поиска неисправностей применяются последовательный, комбинационный и различные сочетания последовательно-комбинаци- онного метода, в соответствии с которыми разрабатывается программа поиска.
Последовательный метод. Поиск неисправностей заключается в последовательном вводе информации о состоянии отдельных функциональных элементов и последующей логической обработке.
Реализация метода требует определения очередности контроля выходных параметров функциональных элементов. Поиск может быть организован по жесткому или гибкому алгоритму. При жестком алгоритме программа контролирует выходные параметры функциональных элементов в заранее определенной последовательности. Гибкий алгоритм изменяет содержание и порядок последующих проверок в зависимости от полученных результатов. Реализация гибкого алгоритма требует более сложной логической обработки результатов контроля и применения более производительных ЭВМ.
Комбинационный метод. Поиск неисправностей заключается в предварительном вводе всех результатов контроля параметров, а затем в последующей логической обработке. Данный метод требует более сложной обработки.
Для поиска неисправностей в реальных системах требуются большой объем исходной информации о состоянии объектов контроля и сложная логическая обработка результатов, кроме того, возможно большое разнообразие программ поиска неисправностей. Поэтому разработаны приближенные способы построения оптимальных программ поиска неисправностей. Эти программы в ос-
79
новном представляют собой многошаговый процесс поиска с выбором на каждом шаге лучшего варианта по экстремуму заданной функции предпочтения.
3.2.4. Система телеизмерения
Система телеизмерения – совокупность устройств на приемных и передающих сторонах и каналов связи для автоматического измерения одного или ряда параметров на расстоянии.
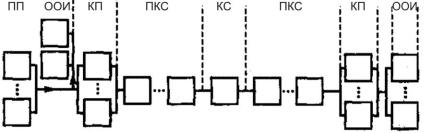
Структурная схема в общем виде системы телеизмерений представлена на рис. 3.8.
Рис. 3.8. Структурная схема телеизмерительной системы
Принятые обозначения на рис. 3.8: ПП – первичные преобразователи; ООИ – блоки обработки и отображения информации; КП – контрольные пункты; ПКС – преобразователи кодов и сигналов; КС – канал связи
Телеизмерительные системы подразделяются по следующим классификационным признакам
–по виду модуляции: интенсивные (тока, напряжения), времяимпульсные (ВИМ и ШИМ), частотные (ЧИМ и ЧМ), кодоимпульсные (двоичные и недвоичные), цифровые и адаптивные;
–по виду телеизмеряемого параметра: аналоговые и цифровые;
–по числу каналов связи: одноканальные и многоканальные;
–по характеристике каналов связи: проводные и радиоканальные;
–по виду телеизмерения: непрерывные, по вызову, по выбору.
80