

Технические измерения и приборы
..pdfВ общем случае под импедансом Z понимают отношение обобщенной силы N к обусловленной ею обобщенной скорости W,
Z |
N |
. |
(2.5) |
|
|||
|
W |
|
|
Понятие входного и выходного импеданса широко используется для электрических измерительных устройств. При этом импеданс определяется как отношение напряжения к току.
Применительно к измерительным устройствам неэлектрических величин для установления наиболее целесообразной формы представления входного и выходного импеданса требуется проведение исследований в каждом отдельном случае.
2.4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
Динамический режим работы измерительного устройства – режим, при котором значения выходного и входного сигналов изменяются во времени, иначе, динамическое или нестационарное или неравновесное состояние.
Большинство измерительные устройства имеют в своем составе инерционные элементы, например, подвижные механические узлы, электрические или пневматические емкости, индуктивности, элементы с тепловой инерцией и т.п. Наличие инерционных элементов определяет инерционность всего измерительного устройства, следовательно, приводит к тому, что в динамическом режиме мгновенное значение выходного сигнала измерительного устройства зависит не только от мгновенного значения входного сигнала, но и от любых изменений этого сигнала, т.е. от его первой и второй производных и производных более высокого порядка.
Инерционные свойства измерительных устройств определяются динамической характеристикой.
Динамическая характеристика измерительного устройства – зависимость выходного сигнала от входного в динамическом режиме.
41

Динамическую характеристику измерительного устройства описывают дифференциальным уравнением, передаточной или комплексной частотной функциями.
Динамическая характеристика измерительных устройств в линейной части статической характеристики описывается дифференциальным уравнением вида
a |
d nY ( ) |
a |
d n 1Y ( ) |
|
a |
dY ( |
) |
|
Y ( ) KX ( ) , |
(2.6) |
||
d n |
d n 1 |
|
|
|
|
|||||||
n |
n 1 |
|
1 |
d |
|
|
|
|
|
|||
или соответствующей передаточной функцией |
|
|
|
|||||||||
|
|
W ( p) |
|
|
|
K |
|
|
|
|
, |
(2.7) |
|
|
|
|
|
|
|
|
|
||||
|
|
|
a pn |
a |
pn 1 |
|
a p |
1 |
||||
|
|
|
|
n |
n 1 |
|
|
1 |
|
|
|
|
либо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y ( p) |
W ( p)X ( p) , |
|
|
|
|
(2.8) |
|||
где Y ( ) и X ( ) – выходной и входной сигналы измерительного устройства как функции времени; n – число, определяющее порядок производной.
Передаточную функцию W (p) в (2.8) можно рассматривать как
коэффициент преобразования измерительного устройства в динамическом режиме.
Передаточная функция или дифференциальное уравнение являются исчерпывающей характеристикой инерционных свойств измерительного устройства, что позволяет определять реакцию измерительного устройства на входные сигналы, изменяющиеся во времени по любому закону.
При анализе работы измерительных устройств в автоматических системах регулирования удобно использовать передаточную функцию.
Передаточную функцию можно определить через переходную (временную) характеристику, которая показывает изменение во времени выходного сигнала измерительного устройства при подаче на его вход скачкообразного входного сигнала h ( ), равного по значению единице величины.
42

Если высота скачкообразного входного сигнала не равна единице, а имеет некоторое значение ХА, то по переходной характеристике можно определить выходной сигнал, используя выражение
Y ( ) h( )X A . |
(2.9) |
Для определения динамических свойств измерительных устройств по переходным характеристикам используется понятие динамического звена. Поскольку известна связь между переходными характеристиками и передаточными функциями типовых динамических звеньев, то это позволяет по форме переходной характеристики измерительного устройства отождествить его с каким-либо типовым динамическим звеном и определить форму передаточной функции. Такая процедура называется идентификацией. На рис. 2.11–2.15 показаны наиболее типичные для измерительных устройств формы переходных характеристик, иначе, «кривые переходных процессов» или «кривые разгона».
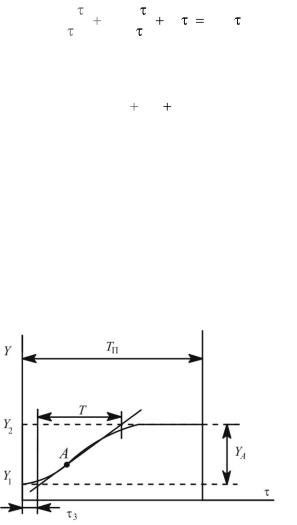
Для их получения в нулевой момент времени входной сигнал измерительного устройства скачком изменяется от некоторого значения Х1 до Х2 на ХА (рис. 2.10).
Рис. 2.10. Форма испытательного входного сигнала
По окончании переходного процесса выходной сигнал измерительного устройства изменяется от значения Y1 до Y2 на YA.
Коэффициент преобразования измерительного устройства K определяется отношением YA/XA.
43

Процесс, представленный на рис. 2.11, соответствуют типовому усилительному (безынерционному) звену и характерен для электронных измерительных устройств.
Рис. 2.11. Переходный процесс безынерционного звена
Дифференциальное уравнение усилительного звена
Y ( ) KX ( ) , |
(2.10) |
передаточная функция представляет коэффициент передачи К. Переходный процесс, показанный на рис. 2.12, характерен для
апериодического звена первого порядка. Кривая на рис. 2.12 представляет собой экспоненту, а величина Т – постоянная времени. Она определяет собой время, за которое выходной сигнал достиг бы нового установившегося значения, если бы изменялся с постоянной скоростью, равной скорости в момент скачкообразного изменения входного сигнала.
Рис. 2.12. Переходный процесс апериодического звена
44

Постоянная времени используется для характеристики динамических свойств измерительных устройств. Проведение касательной к кривой переходного процесса сопряжено с погрешностями, поэтому значения постоянной времени определяют как интервал времени, за который выходной сигнал изменяется на 0,632 от своего приращения YA (рис. 2.12). Корректность такого определения доказана математически. Звено описывается дифференциальным уравнением
T |
dY ( ) |
Y ( ) KX ( ) |
(2.11) |
|
d |
||||
|
|
|
и передаточной функцией
K |
|
Tp 1 . |
(2.12) |
На рис. 2.13 показан переходный процесс характерный для колебательного звена.
Рис. 2.13. Переходный процесс колебательного звена
Колебательное динамическое звено, а следовательно, и измерительное устройство, в котором имеет место переходный процесс (рис. 2.13), можно рассматривать как соединение двух апериодических звеньев с постоянными времени Т1 и Т2. При этом в зависимости от соотношений Т1 и Т2 переходный процесс будет различен. Если (T1/T2) < 2, то он имеет форму кривых 1 и 2, а при (T1/T2) 2 – форму
45
кривой 3 (рис. 2.13). Дифференциальное уравнение колебательного звена
T |
2 d 2Y ( ) |
T |
dY ( ) |
Y ( ) KX ( ) . |
(2.13) |
||
|
|
|
|
||||
2 d |
2 |
1 |
d |
|
|
||
Передаточная функция
|
K |
|
|
|
|
. |
(2.14) |
T 2 p2 |
T p 1 |
||
2 |
1 |
|
|
Переходные процессы, представленные на рис. 2.12 и 2.13, характерны для большого числа измерительных устройств, основанных на прямом преобразовании.
На рис. 2.14 и 2.15 показаны переходные процессы, которые характерны для динамических звеньев, когда дифференциальное уравнение, описывающее динамику измерительного устройства, имеет порядок более чем второй.
В этих случаях принято рассматривать измерительные устройства как совокупность нескольких, соединенных последовательно типовых динамических звеньев. Например, измерительное устройство с переходным процессом, показанным на рис. 2.14, можно рассматривать как
Рис. 2.14. Переходная характеристика апериодического звена и звена чистого запаздывания
46

Рис. 2.15. Переходная характеристика колебательного звена и звена чистого запаздывания
соединение звена чистого запаздывания со временем запаздывания з и апериодического звена с постоянной времени Т (для графического определения значений з и Т достаточно провести касательную к точ-
ке перегиба A на рис. 2.14). Дифференциальное уравнение: |
|
||||||||
T |
dY ( ) |
|
Y ( |
) |
|
KX ( |
з ) . |
(2.15) |
|
d |
|||||||||
|
|
|
|
|
|
|
|||
Передаточная функция: |
|
|
|
|
|
|
|||
|
|
|
K |
|
e |
з p . |
|
(2.16) |
|
|
|
|
Tp |
|
|
||||
|
|
|
1 |
|
|
|
|||
Измерительное устройство с переходным процессом, показанным на рис. 2.15, можно рассматривать как соединение звена чистого запаздывания и колебательного звена. Дифференциальное уравнение и переходная характеристика имеют вид:
T |
2 d 2Y ( ) |
|
T |
dY ( |
) |
Y ( ) |
KX ( |
|
) , |
(2.17) |
||||
|
|
|
|
|
|
|
|
|||||||
2 d |
2 |
1 |
|
d |
|
|
|
|
з |
|
|
|||
|
|
|
|
|
|
|
K |
|
|
e |
з p . |
|
|
(2.18) |
|
|
|
|
|
T 2 p2 |
|
|
|
|
|
||||
|
|
|
|
|
T p 1 |
|
|
|
|
|||||
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
47 |

Для всех измерительных устройств важным является время установления выходного сигнала Tп (рис. 2.11–2.15), иначе, время реакции или установления показаний. Оно определяет собой отрезок времени, необходимый для завершения переходного процесса при скачкообразном изменении входного сигнала.
Все переходные процессы заканчиваются теоретически при бесконечном значении времени, поэтому за время установления выходного сигнала (Tп) обычно принимают время, за которое выходной сигнал измерительного устройства, приближаясь к новому установившемуся значению, входит в некоторую зону, отличающуюся от этого значения на ±5 %.
Значение времени реакции может быть приближенно определено через постоянную времени измерительного устройства из выражения
Tп (3 5)T . |
(2.19) |
2.5. ПОГРЕШНОСТИ СРЕДСТВ ИЗМЕРЕНИЙ
Погрешность средств измерений или инструментальная погрешность имеет определяющее значение для наиболее распространенных технических измерений.
Наиболее существенные составляющие погрешности измерений обусловлены как свойствами самих используемых СИ, так и их взаимодействием с контролируемым объектом.
Инструментальные погрешности классифицируются по следующим признакам:
1)по характеру проявления при повторных измерениях одного
итого же значения физической величины;
2)в зависимости от условий применения измерительных устройств;
3)в зависимости от поведения измеряемой величины во времени;
4)по форме представления погрешности;
5)по зависимости от значения измеряемой величины.
1. По характеру проявления при повторных измерениях одного и того же значения физической величины погрешности подразде-
ляются на систематическую и случайную составляющие.
48
Эти понятия в основном тождественны понятиям систематической и случайной погрешностей измерений. Особенность состоит в том, что всякое измерительное средство предназначено для внесения определенности в исследуемый процесс, а наличие случайной составляющей погрешности приводит к неоднозначности. Поэтому минимизация случайной погрешности должна решаться на этапе проектирования и конструирования средств измерений, после чего достаточно малая систематическая погрешность обеспечивается путем градуировки измерительного средства.
2.В зависимости от условий применения средств измерений различают основную и дополнительную погрешность.
Нормальные условия – условия применения, при которых влияющие величины находятся в пределах нормальной области значений, которые указываются в стандартах или технических условиях на средства измерений.
Основная погрешность – погрешность средств измерений при использовании в нормальных условиях.
Рабочие условия характеризуются большим влиянием изменяющих факторов, чем нормальные условия. Область рабочих условий включает и область нормальных условий.
Дополнительная погрешность – погрешность при выходе од-
ной или нескольких влияющих величин за пределы нормальной области значений. Дополнительная погрешность представляет часть погрешности, которая добавляется к основной погрешности в случаях применения средств измерений в рабочих условиях. Если основная погрешность измерительных устройств определена для рабочей области, то понятие дополнительной погрешности теряет смысл.
3.В зависимости от поведения измеряемой величины во времени различают статическую и динамическую погрешности измерительных устройств.
4.По форме представления различают абсолютную, относи-
тельную и приведенную погрешность измерительных устройств. Для измерительных приборов и преобразователей определение
этих погрешностей отличается.
49

Для определения погрешности вводится понятие действительного значения измеряемой величины (Xд), которое определяется с помощью образцового прибора или воспроизводится мерой и на столько близко к истинному значению величины, что может быть использовано вместо него.
Форма представления погрешности измерительных прибо-
ров. У измерительных приборов имеется шкала, отградуированная в единицах входной величины, поэтому результат измерения представляется в единицах входной величины. Это обусловливает простоту определения погрешности измерительных приборов.
Абсолютная погрешность измерительного прибора ( ) – раз-
ность показаний прибора (Xп) и действительного значения измеряемой величины (Xд),
= Xп – Xд. |
(2.20) |
Относительная погрешность измерительного прибора ( ) –
отношение абсолютной погрешности измерительного прибора к действительному значению измеряемой величины. Относительную погрешность обычно выражают в процентах,
100 |
. |
(2.21) |
||
|
|
|||
X |
д |
|||
|
|
|||
Поскольку абсолютная погрешность существенно меньше действительного значения измеряемой величины или величины показаний прибора ( << Xд или << Xп), то в выражении (2.21) вместо значения Хд может быть использовано значение Xп.
Приведенная погрешность измерительного прибора ( ) – от-
ношение абсолютной погрешности измерительного прибора к нормирующему значению XN. Приведенную погрешность также выражают в процентах,
100 |
. |
(2.22) |
|
|
|||
X N |
|||
|
|
50