

Электрические машины конспект лекций
..pdfВОПРОСЫ
7.4.1.Ротор четырехполюсного двигателя вращается со скоростью n 1400 об/мин. Частота статорного тока f1 50 Гц. Че- му равна скорость n02 вращения магнитного потока ротора Ф2 относительно ротора?
à) 1500 îá/ìèí; á) 100 îá/ìèí.
7.4.2.Чему равна скорость n02 (см. предыдущий вопрос) при неподвижном роторе?
à) 1500 îá/ìèí; á) 100 îá/ìèí.
7.4.3.Укажите правильное соотношение магнитных потоков двигателя при холостом ходе Ф0, номинальной нагрузке Фíîì
èдвукратной перегрузке двигателя Фn2.
à) 0 íîì n2 ; á) 0 íîì n2 ; â) 0 íîì n2 .
Лекция 8
ОСНОВНЫЕ УРАВНЕНИЯ И СХЕМЫ ЗАМЕЩЕНИЯ ДВИГАТЕЛЯ
8.1. Основные уравнения асинхронного двигателя
8.1.1. Уравнение токов
Уравнение (7.10) может быть переписано и так:
m1 w1K 01 I 1 m2 w2 K 02 I 2 m1 w1K 01 I 0 , |
(8.1) |
ãäå m1 è m2 — соответственно числа фаз статора и ротора. Разделив все члены уравнения (8.1) на m1w1K01, получим
I 1 m2 w2 K 02 I 2 I 0 .
Отношение
m1 w1K 01 K i
m2 w2 K 02
назовем коэффициентом трансформации токов, а
m2 w2 K 02 |
I 2 |
|
I 2 |
I 2 |
|
|
|||
m1 w1K 01 |
|
K i |
|
|
— приведенным током ротора асинхронного двигателя. Тогда
I 1 I 2 I 0 . |
(8.2) |
Уравнение (8.2) и будет уравнением токов асинхронного двигателя. Оно может быть переписано и так:
I 1 I 0 I 2 . |
(8.3) |
92
Отсюда видно, что ток статора при нагрузке состоит из двух составляющих: тока холостого хода I 0 , создающего магнитное поле в двигателе, и нагрузочной составляющей ( I 2 ), равной по величине приведенному току ротора, но направленной в обратную сторону и компенсирующей размагничивающее действие роторной обмотки.
ВОПРОСЫ
8.1.1.1. Ток холостого хода двигателя I 0 0,2 j10,3 A, приведенный роторный ток I 2 12,5 j2a. Определите ток
статора.
à) I 1 12,3 j8,3 A; á) I 1 12,7 j12,3 A.
8.1.2. Уравнение напряжений статора
Уравнение напряжений статорной цепи получим, как и для трансформатора, на основании второго закона Кирхгофа:
|
|
|
|
, |
U1 |
E1 |
E ð1 |
r1 I 1 |
|
ÝÄÑ |
|
|
|
|
|
|
|
|
|
|
E ð1 |
jx1 I 1 |
|
|
индуктируется в статорной обмотке потоком статорного рассеяния, замыкающимся только вокруг витков статорной обмотки и не заходящим в ротор. В окончательном виде
|
|
|
r1 |
|
|
|
|
(8.4) |
U1 |
E |
1 |
jx1 I 1 |
E |
1 |
z1 I 1 . |
Так как падение напряжения в статорной обмотке z1 I 1 , ïî
сравнению с ЭДС E1 , невелико, то для грубо приближенных рас- четов можно считать, что
U1 E1 4,44 f1 w1K 01 ,
и, следовательно, при неизменном напряжении на двигателе магнитный поток практически постоянен. (В действительности и Ф, и E1 при изменениях нагрузки также изменяются, но незна- чительно.)
93

ВОПРОСЫ
8.1.2.1.Изменяется ли поток статорного рассеяния с увели- чением нагрузки на двигатель?
а) не изменяется; б) уменьшается; в) увеличивается.
8.1.2.2.Как изменится ток холостого хода I0 при уменьшении числа витков статорной обмотки (U1 = const)?
а) увеличится; б) не изменится; в) уменьшится.
8.1.3. Уравнение напряжений ротора
Уравнение напряжений роторной цепи легко получить на основании схемы замещения ротора (см. рис. 7.2):
Здесь E
сеяния,
Тогда
|
|
|
r2 |
|
E 2 |
E ð2 |
|
|
I 2 . |
s |
ð2 — ЭДС, индуктируемая потоком роторного рас-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E ð2 jx2 I 2 . |
|
|
|
|
|||||||
|
|
|
r |
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
|||||
E |
|
|
|
|
jx |
I |
|
z |
I |
|
. |
(8.5) |
||
2 |
|
2 |
2 |
|||||||||||
|
|
2 |
|
|
2 |
|
|
|
||||||
|
|
|
s |
|
|
|
|
|
|
|
|
|
||
Используя это уравнение, необходимо только помнить, что
z2 r2 jx2 s
является не фактическим полным сопротивлением роторной цепи, а сопротивлением схемы замещения, учитывающим и механическую мощность ротора. Если использовать фактическое
полное сопротивление ротора z2s r2 |
j sx2 , то уравнение на- |
|
пряжений ротора примет вид |
|
|
|
|
(8.6) |
E |
2s z2s I 2 . |
|
94

Уравнения (8.5) и (8.6) равноценны.
Сличая выражения для ЭДС обмоток и основные уравнения двигателя с такими же выражениями для трансформатора, мы убеждаемся в их сходстве.
ВОПРОСЫ
8.1.3.1.Зависит ли полное сопротивление схемы замещения ротора z2 от нагрузки двигателя?
а) нe зависит; б) зависит.
8.1.3.2.Покажите, что уравнения (8.5) и (8.6) по существу
одинаковы.
8.2. Приведение роторной обмотки к статорной
Подобно трансформатору в тех случаях, когда совместно рассматриваются процессы в статорной и роторной цепях, роторная обмотка приводится к статорной. Это значит, что действительная роторная обмотка заменяется условной расчетной обмоткой с тем же числом витков, тем же числом фаз и таким же обмоточным коэффициентом, что и у статорной обмотки. При этом необходимо, чтобы энергетические процессы в двигателе не изменились. Следовательно, все активные, реактивные и полные мощности приведенной и неприведенной обмоток должны быть соответственно равны между собой.
Приведенная ЭДС ротора
E 2 E1 K åE 2 , |
(8.7) |
ãäå Kå — коэффициент трансформации ЭДС асинхронного двигателя,
K å E1 w1K 01 .
E 2
Тогда, приравнивая полные мощности приведенной и неприведенной обмоток
m1E 2 I 2 m2 E 2 I 2 ,
получим приведенный ток ротора
95
I 2 |
m2 E 2 |
I 2 |
|
m2 w2 K 02 |
|
I 2 |
, |
(8.8) |
|
m1E 2 |
m1 w1K 01 |
K i |
|||||||
|
|
|
|
|
|
т. е. то, что мы уже получили, выводя уравнение токов. Коэффициент трансформации токов
K i m1 w1K 01
m2 w2 K 02
для двигателя с фазным ротором, у которого m1 m2 , совпадает с коэффициентом трансформации ЭДС Kå. Для двигателей с короткозамкнутым ротором Kå è Ki будут различны. При определении Ki è Kå в этом случае число фаз m2 принимается равным чис-
лу стержней обмотки, число витков на фазу w2 1 и обмоточ- 2
ный коэффициент K 02 1,0.
Приведенное активное сопротивление фазы ротора получим на основании равенства потерь активной мощности в приведенной и неприведенной обмотках:
m1r2 I 2 2 m2 r2 I 22 .
Отсюда
|
|
m |
|
I |
2 |
2 |
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
r2 |
|||
r2 |
|
|
2 |
|
||||
|
|
m1 |
|
|
|
|
|
|
|
|
I 2 |
|
|
|
|||
m |
|
m w K |
|
2 |
|
|
|
||
2 |
1 1 01 |
|
K åK i r2 . (8.9) |
|
|
|
|
||
|
|
|||
m1 |
|
|
||
m2 w2 K 02 |
|
|
||
Аналогично по равенству реактивных мощностей роторного рассеяния
m1 x2 I 2 2 m2 x2 I 22 |
|
получим |
|
x2 K åK i x2 . |
(8.10) |
Соответственно и |
|
z2 K åK i z2 . |
(8.11) |
ВОПРОСЫ
8.2.1. Определите приведенные сопротивления r2 è x2 трехфазного асинхронного двигателя с короткозамкнутым ротором, если r2 8 10 5 Îì, x2 0,31 10 3 Îì, w1 120 витков, K 01 0,9 и число стержней ротора n 46.
96
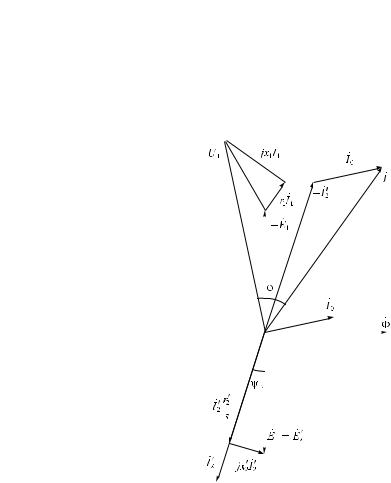
8.3. Векторная диаграмма асинхронного двигателя
Для приведенного асинхронного двигателя легко может быть построена на основании уравнений (8.2), (8.4) и (8.5) векторная диаграмма (рис. 8.1). Только уравнение (8.5) должно быть записано для приведенного ротора:
E 2
|
|
|
r2 |
jx2 |
|
|
|
|
|
||
|
|
|
s |
|
|
|
|
|
|
|
|
2 |
(8.12) |
||
I |
z2 I 2 . |
|||
|
|
|
|
|
|
|
|
|
|
Верхняя часть диаграммы, соответствующая статорной цепи двигателя, вполне подобна той же части векторной диаграммы нагруженного трансформатора, соответствующей первич- ной цепи, и строится аналогично. Роторная (нижняя) часть векторной диаграммы получается исходя из схемы замещения ротора (см. рис. 7.2), т. е. ЭДС и частота ротора принимают- 


ся постоянными и |
равными |
|
|
|
|
|
|
||||
соответственно E 2 |
è f1. Èñ- |
||||||||||
пользование в векторной диа- |
|||||||||||
грамме |
ÝÄÑ |
вращающегося |
|
|
|||||||
|
|||||||||||
ротора |
будет |
неправильным, |
|
|
|||||||
так как частота ее отлична от |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
частоты ЭДС статора. ЭДС E 2 |
|
|
|||||||||
уравновешивается |
падением |
|
|
|
|
|
|
||||
напряжения в цепи ротора, ак- |
|
|
|||||||||
тивная и реактивная состав- |
|
|
|||||||||
ляющие которого равны соот- |
|
|
|
|
|||||||
|
|
|
|||||||||
ветственно |
r2 |
|
|
|
|
|
|
||||
s |
I 2 è |
jx2 I 2 . Òàê |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
как активное |
сопротивление |
|
|
|
|
|
|
||||
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
обычно значительно боль- |
|
|
|
|||||||
|
|||||||||||
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
øå x2 , òî óãîë 2 между E 2 è |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
I 2 очень невелик. |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Рис. 8.1. Векторная диаграмма нагру- |
||||||
|
|
|
|
|
женного асинхронного двигателя |
||||||
97
ВОПРОСЫ
8.3.1. Как будет изменяться с ростом нагрузки угол 2 на векторной диаграмме (см. рис. 8.1)?
а) увеличиваться; б) уменьшаться;
в) оставаться постоянным.
8.4. Схемы замещения асинхронного двигателя
Во многих случаях проще и удобнее исследовать процессы в асинхронном двигателе, если его представить в виде электри- ческой неподвижной цепи без индуктивных связей, в которой изменения всех электрических величин подчинялись бы тем же закономерностям, что и в реальном двигателе. Такая схема и называется схемой замещения.
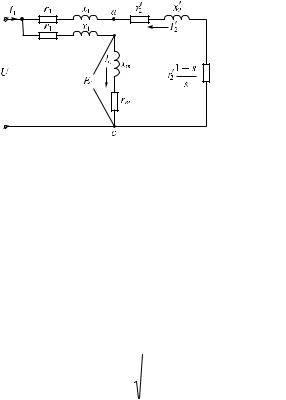
8.4.1. Т-образная схема замещения
Фактическая схема статорной и роторной цепей асинхронного двигателя в их взаимной связи показана на рис. 8.2, à. (схема дана для одной фазы). Статорная обмотка с сопротивлениями r1 è x1 и роторная с сопротивлениями r2 è x2s связаны между собой только индуктивно через магнитный поток Ф. Для получе- ния схемы замещения заменим ротор неподвижной электриче- ской цепью (см. подразд. 7.3) и роторную обмотку приведем к статорной. Тогда получим схему рис. 8.2, á. Òàê êàê E 2 E1 , то потенциалы точек à è b, также как и точек ñ è d, будут между собой равны. Тогда их можно попарно соединить (как показано на рис. 8.2, á пунктиром). Это не внесет никаких изменений в работу схемы, так как тока в перемычках ab è cd не будет, но статорная и роторная цепи окажутся электрически связанными. По общей для обеих цепей ветви àb–cd будет протекать ток:
I 0 I 1 I 2 .
Чтобы устранить из схемы индуктивную связь обмоток и магнитный поток Ф, надо, очевидно, между точками à è ñ включить сопротивления xm è rm, влияние которых на процессы в схеме было бы эквивалентно влиянию магнитного потока.
98

При этом индуктивное сопротивление xm будет определять реактивную мощность
Q0 3xm I 02 ,
(для всех трех фаз двигателя), необходимую для создания магнитного потока , а активное сопротивление rm — активную мощность
Pñò 3rm I 02 ,
расходуемую на покрытие потерь в стали двигателя.
Таким образом, мы полу- чим схему (см. рис. 8.2, â), которая называется Т-об-
разной схемой замещения асинхронного двигателя. Нетрудно заметить, что Т-образная схема замещения будет полностью соответствовать основным уравнениям (8.2), (8.4) и (8.5) асинхронного двигателя. Ветвь àñ, по которой
протекает ток I0, называется намагничивающей ветвью.
Если известны параметры (сопротивления) схемы замещения, то по заданным статорному напряжению U1 и скольжению s можно, используя методы расчета цепей переменного тока (рассмотренные в курсе «Электрические и магнитные цепи»), определить токи в отдельных ветвях схемы, а по ним — соответствующие активные и реактивные мощности. Параметры схемы замещения определяются опытным путем.
99
ВОПРОСЫ
8.4.1.1. Определите по токам и сопротивлениям схемы замещения (рис. 8.2, â) активную и реактивную мощности, потребляемые двигателем из сети при скольжении s, и коэффициент мощности двигателя.
8.4.2. Г-образная схема замещения
Однако для исследования работы двигателя часто удобнее пользоваться так называемой Г-образной схемой замещения (рис. 8.3).
Она образуется из
Т-образной схемы путем
вынесения намагничивающей ветви в начало схемы на напряжение U1. Чтобы
напряжение на этой ветви
по-прежнему осталось равным E1, à òîê — I0, последовательно с ней включаются
Рис. 8.3. Г-образная схема замещения асин- сопротивления r1 è x1.
Òîê I 2 в Г-образной схеме будет несколько отличаться от фактического, так как I 2 I 1 и падение напряжения на со-
противлениях r1 è x1 в Г-образной схеме z1 I 2 будет меньше действительного z1 I 1 . Следовательно, напряжение на роторной части схемы (между точками à è ñ) и соответственно ток I 2 будут несколько больше действительных. Однако эта погрешность невелика и не вносит существенного изменения в работу схемы, из Г-образной схемы легко определить ток ротора по напряжению на статоре двигателя:
I 2 |
|
|
|
|
|
U1 |
|
|
|
|
|
|
. |
(8.13) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
r 2 |
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
|
|
x1 |
x2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||||
|
r1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
s |
|
|
|
|
|
|
|
|
|
||