

Синтез контура командного теленаведения летательного аппарата в программном комплексе «Моделирование в технических устройствах» (МВТУ 3.6) (96
.pdfгде hmax — радиус действия боевой части (БЧ) с требуемой эффективностью. В рассматриваемом примере hmax 45 м.
Передаточная функция блока формирования управляющего сигнала (БФУС) может быть представлена так:
WБФУС s Kh τБФУСs 1 , |
(8) |
где τБФУС Kh Kh.
Проведем анализ качества полученной системы третьего поряд-
ка при варьировании параметров Kh и Kh с помощью диаграммы Вышнеградского. Нас интересуют только область колебательных переходных процессов с перерегулированием. Передаточные функции рассматриваемой КСТН в замкнутом состоянии имеют вид
ΦКСТНϕ |
s |
|
KССV Kh τБФУСs 1 |
|
, |
(9) |
|
|
|
||||
|
|
TССs3 s2 KССKhV s KССV Kh |
|
|||
ΦКСТНh |
s |
|
τБФУСs 1 |
|
. |
(10) |
|
|
|
||||
|
|
TССs3 s2 KССKhV s KССV Kh |
|
|||
Характеристический |
полином передаточных |
функций |
КСТН |
|||
в замкнутом состоянии имеет вид |
|
|
|
|||
|
|
|
|
|
|
|
D s TССs3 s2 KССKhV s KССV Kh. |
(11) |
|||||
Соответственно характеристический полином запишется так:
a0λ3 a1λ2 a2λ a3 0, |
(12) |
где a0 TСС; a1 1; a2 KССKhV ; a3 KССV Kh.
Тогда, используя безразмерную форму характеристического полинома Вышнеградского q3 Aq2 Bq 1 0 и формулы для его
3 |
|
|
, A |
|
a1 |
и B |
|
a2 |
, можно запи- |
|||
|
|
|
|
|||||||||
параметров q λ a0 |
a3 |
|
|
|
|
|
|
|||||
3 |
|
2 |
3 |
|
2 |
|
||||||
|
|
|
|
a0a3 |
|
a3a0 |
|
|||||
сать для варьируемых коэффициентов закона управления:
|
|
|
1 |
|
3 |
TССK2 |
||
Kh |
|
|
|
|
, Kh B |
|
h |
. |
3 |
2 |
|
KССV |
|
|
|||
|
A T |
СС |
|
|
KССV |
|||
|
|
|
|
|
|
|
||
11

Откуда получим
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
Kh |
|
|
, A |
|
1 |
. |
(13) |
||
|
|
|
|
|
|
|
|
|||||
T |
СС |
K2 |
3 |
2 |
||||||||
|
3 |
|
|
|
h |
|
|
|
||||
|
|
|
|
|
|
|
|
|
KhTССKССV |
|
||
|
|
|
KСС V |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
Принимая для начала работы при Kh Kh min, получаем значение первого параметра Вышнеградского равным
1 |
|
1,048. |
||
A |
|
|
|
|
|
|
|
||
|
0,01356 0,56052 |
0,425 480 |
||
3 |
|
|
|
|
Рис. 6. Диаграмма Вышнеградского
12
Для проведения дальнейшего анализа влияния параметров БФУС на вид переходной функции построим диаграмму Вышнеградского, представленную на рис. 6.
Выбирая теперь несколько значений безразмерного параметра B так, чтобы оставаться в пределах области I диаграммы, с помощью ПК МВТУ проведем моделирование и определим характеристики качества переходных функций исследуемой системы.
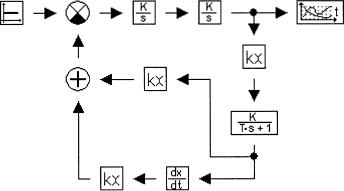
Для этого составим в ПК МВТУ расчетную структурную схему, показанную на рис. 7.
Рис. 7. Расчетная структурная схема исследуемой системы
При составлении этой схемы выбираем блоки:
•входное воздействие — «Константа» из закладки «Источники»;
•выход «График» — из закладки «Данные»;
•усилитель kx, сравнивающее устройство и сумматор — из закладки «Операции».
Остальные элементы берутся из закладки «Динамические».
Для оценки точности моделируемой системы используем передаточную функцию КСТН с выходом по динамической ошибке.
На вход системы подается единичное воздействие. У верхнего сравнивающего устройства параметры объекта 1 и 1. У нижнего сравнивающего устройства оба весовых множителя равны 1. Свойства обоих интеграторов оставляем без изменений, по умолчанию
13

коэффициент усиления для них равен 1, а начальные условия нулевые. Для усилителя вводим коэффициент усиления V 480 м с. Параметры апериодического звена вводим следующие:
•коэффициент усиления 0,425;
•постоянная времени 0,5605;
•вектор начальных условий 0.
Усилители Kh и Kh имеют варьируемые параметры, задаваемые нами в процессе исследования. Числовые значения этих параметров и соответствующие им характеристики переходного процесса приведены в таблице, а их переходные процессы на рис. 8.
|
|
Параметры и результаты моделирования |
Таблица |
||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
№ |
|
|
|
|
tпп, |
Перерегулиро- |
|
Колебатель- |
|
A |
B |
Kh |
Kh |
|
|
||||
п/п |
|
|
|
|
с |
вание σ, % |
|
ность |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1,5 |
0,0156 |
0,0131 |
13 |
57 |
|
8 |
|
2 |
1 |
2 |
0,0156 |
0,0175 |
7 |
25 |
|
5 |
|
3 |
0,9 |
2 |
0,0214 |
0,0216 |
7,5 |
35 |
|
6 |
|
4 |
0,8 |
2 |
0,0305 |
0,0273 |
9,5 |
45 |
|
8 |
|
5 |
0,5 |
2,5 |
0,1248 |
0,0874 |
21 |
68 |
|
36 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 8. Переходные характеристики СС
14

Как видно, при малых значениях параметра A переходный процесс получается с малым временем срабатывания, но с очень большой колебательностью, а при больших A время срабатывания слишком велико.
Поэтому выберем средний вариант: A 0,9 и B 2, практически совпадающий с точкой на диаграмме Вышнеградского, в которой квадратичная интегральная оценка качества имеет минимум.
Тогда искомые числовые значения коэффициентов усиления
БФУС равны: Kh 0,0214 и Kh 0,0216.
Этап 3. Построение логарифмической амплитудной характеристики (ЛАХ) неизменной части системы
Для синтеза используем упрощенную расчетную структурную схему КСТН с входом по ϕц и выходом по ϕ (см. рис. 4).
Составляем эту схему в ПК МВТУ.
Передаточная функция неизменной части КСТН имеет вид
WКСТНϕ |
s |
KКСТН τБФУСs 1 |
, |
|
TССs 1 s2 |
||||
|
|
|
где KКСТН KССV Kh 4,366.
При построении ЛАХ проводим асимптоту из точки с коорди-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
натами KКСТН; 0 с наклоном 40 дБ дек. |
|
|
|||||||||||
На частоте ωБФУС |
1 |
1 |
|
0,991 с 1 |
ЛАХ имеет из- |
||||||||
|
|
|
|
||||||||||
τБФУС 1,009 |
|||||||||||||
|
|
|
|
1 |
|
|
1 |
|
|||||
лом 20 дБ дек, и затем на частоте ωСС |
|
|
1,784 с 1 |
||||||||||
|
|
|
|
||||||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
TСС 0,5605 |
|||||
20 дБ дек. Построим ЛАХ в ПК МВТУ. Схема системы представлена на рис. 9.
Рис. 9. Схема набора КСТН в программе МВТУ
15

На вход системы подается единичный сигнал. Затем формируем модели рассматриваемых динамических звеньев. Для первого интегратора KКСТН 4,366. Параметры второго интегратора оставляем без изменений. Формируем модели инерционно-форсирующих звеньев:
•постоянная времени T1 1,009 с;
•постоянная времени T2 0,5605 с;
•начальное условие — 0.
Для построения ЛАХ необходимо сформировать два блока записи в память. Для этого нужно на закладке «Субструктуры»
выбрать элемент V и разместить его в двух местах схемы.
Затем, промоделировав обычным образом систему с параметрами Сравнивающего звена 1 и 1, необходимо изменить их на 1 и 0,
чтобы разорвать обратную связь. Затем, из верхнего меню надо выбрать «Анализ» — «Частотный анализ». В появившемся окне нажать на кнопку «Характеристики». Далее, нажав на элемент
:: , выбрать в выпадающем меню в качестве входа вход Y1, вы-
ходящий сразу после источника входного воздействия, а в качестве выхода — Y2, выходящий из ветви обратной связи. Выбрать характеристику ЛАХ. В качестве начальной и конечной частоты следует выбрать интервал, включающий частоты ωБФУС и ωСС. Остальные параметры лучше оставить без изменений. Нажимая на кнопку «Расчет», мы запускаем построение ЛАХ. Результат получаем в виде графика (рисунок представлен ниже).
Совпадение асимптотической и расчетной ЛАХ подтверждает правильность расчетов.
Этап 4. Формирование ЛАХ желаемой системы
На четвертом этапе работы происходит формирование ЛАХ желаемой системы (желаемой ЛАХ).
По диаграмме Солодовникова для заданной величины перерегулирования σmax 40 % находим L1 10 дБ и L2 10 дБ.
Находим по графику частоту в точке пересечения ЛАХ неизменной части системы и графика L2 10 дБ, в рассматриваемом примере ωж3 5,88 с 1, следовательно, Tж3 1 ωж3 1 5,88 0,17 с.
16
Из найденной точки строим среднечастотную асимптоту желаемой ЛАХ с наклоном 20 дБ дек и на пересечении ее с L1 10 дБ получаем ωж2 0,588 с 1, следовательно, Tж2 1 ωж2 1 0,5881,7 с.
Таким образом, желаемая частота среза ωср ж 1,86 с 1.
Из точки ω1; 10 проводим асимптоту с наклоном 60 дБ дек и соединяем низкочастотную часть ЛАХ неизменной части системы со среднечастотной асимптотой, получаем ω1 0,12 с 1, следовательно, Tж1 1 ωж1 1 0,11 9,1 с.
Передаточная функция желаемой ЛАХ |
|
|
|
|
||||||
Wж s |
KКСТН |
|
Tж2s 1 Tж2s 1 |
|
4,366 |
|
1,7s 1 1,7s 1 |
. |
||
s |
2 |
|
|
s |
2 |
|
|
|||
|
|
|
Tж1s 1 Tж3s 1 |
|
|
9,1s 1 0,17s 1 |
|
|||
Строим ее в ПК МВТУ аналогично ЛАХ неизменной части системы. Результаты приведены ниже. Совпадение асимптотической и расчетной ЛАХ подтверждает правильность расчетов.
Этап 5. Синтез последовательного корректирующего контура
Пятый этап работы заключается в расчете и нахождении структуры последовательного корректирующего контура. Цепь прямого сигнала в данной следящей системе — силовая. Поскольку пассивные четырехполюсники при последовательном включении дают эффект падения напряжения за счет внутренних токов, то именно поэтому корректирующий контур (КК) всегда будет включен в обратную связь. Однако теоретически КК может быть включен последовательно с управляющим устройством, как показано на рис. 1. Для построения ЛАХ используем выражение
Lж ω Lн ω LКК ω ,
тогда
LКК ω Lж ω Lн ω . |
(14) |
Полученная графическим путем асимптотическая ЛАХ корректирующего фильтра позволяет определить сопрягающие частоты и наклоны отдельных асимптот (рис. 10).
17

Рис. 10. Асимптотические ЛАХ синтезируемой системы
Рис. 11. Расчетная структурная схема модели синтезированной КСТН
18

В результате определяется структура и параметры передаточной функции фильтра:
WКК s |
Tж2s 1 Tж2s 1 TССs 1 |
. |
(15) |
|
Tж1s 1 Tж3s 1 τБФУСs 1 |
|
|
Затем проверяем правильность ЛАХ полученного фильтра моделированием в ПК МВТУ. Сформировав систему и введя в качестве постоянных времени полученные значения, проводим частотный анализ. Результаты моделирования приведены ниже.
Для определения переходной функции синтезированной системы надо включить последовательный корректирующий фильтр в структурную схему модели. Полученная расчетная структурная схема модели синтезированной КСТН представлена на рис. 11.
Результаты моделирования приведены на рис. 12, 13.
Как видно из графика, переходная функция синтезированной КСТН представляет собой колебательный процесс с небольшим
Рис. 12. Логарифмические амплитудно-частотные и фазочастотная характеристики синтезируемой системы
19

Рис. 13. Переходные характеристики синтезируемой КСТН
заданным перерегулированием и временем переходного процесса 4 с. При этом время выхода на заданный уровень равно 2 с, что можно считать удовлетворительным. В процессе проектирования КСТН необходимо помнить, что весь синтез системы основан на том, что рассматриваются безразмерные системы с входным единичным ступенчатым воздействием, т. е. все результаты получены в безразмерной форме. Для того чтобы получить реальные значения промежуточных и выходных параметров, на вход системы необходимо подать реальный размерный сигнал.
Этап 6. Оценка максимально допустимой величины τлс
Поскольку КСТН имеет динамическое звено, которое по сути представляет собой звено чистого сдвига, то оно воспроизводит входной сигнал без искажения, но с некоторым постоянным запаздыванием τлс:
Wлс s Kлсe τлсs. |
(16) |
20