

Теория автоматического управления (110
..pdfОпределим передаточную функцию замкнутой системы по управлению:
|
Φx (P) = |
|
W (P) |
= |
|
A(P) |
= |
|
|
|
|
1+W (P) |
|
A(P) + B(P) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
= |
|
|
|
4,5P +9 |
|
= |
|
||||
4,5P +9 +1,8P3 +1,44P 2 + 2,98P +1,8 |
|
||||||||||
= |
|
|
4,5P + 9 |
|
|
. |
(9) |
||||
0,18 P 3 |
|
+ 1,44 P 2 |
+ 7,48 P + 10 ,8 |
||||||||
Определим передаточную функцию замкнутой системы по возмущению:
Φf (P) = |
|
|
W (P) |
= |
W1(P)B(P) |
= |
|
|
|
|||
1 |
+W (P) |
|
|
|
||||||||
|
|
|
|
|
A(P) + B(P) |
|
|
|||||
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(0,18P3 +1,44P2 + 2,98P |
+1,8) |
|||||
|
|
|
|
|
||||||||
= |
|
0,6P +1 |
|
|
|
|
|
= |
||||
|
|
0,18P3 +1,44P2 +7,48P +10,8 |
|
|||||||||
|
|
|
|
|
||||||||
|
= |
|
|
|
3P2 +19P +18 |
|
|
|||||
|
|
. |
(10) |
|||||||||
|
0,18P3 +1,44P2 +7,48P +10,8 |
|||||||||||
2. Определим устойчивость САУ по критерию Гурвица. Запишем характеристическое уравнение замкнутой системы по управлению. Для этого приравняем к нулю знаменатель передаточной функции по управлению.
а0Р3+а1Р2+а2Р+а3=0, |
(11) |
0,18Р3+1,44Р2+7,48Р+10,8=0.
При положительных коэффициентах критерий Гурвица сводится к проверке следующего неравенства:
∆3 = а3 · ∆2 = а3·(a1a2 −a3a0 ) > 0, |
(12) |
10,8·(1,44 7,48 −0,18 10,8) = 95,33 > 0.
11

Определим критический коэффициент усиления замкнутой системы по формуле:
kmax = a1a2 = 1,44 7,48 = 59,84. a0 0,18
Проверим устойчивость системы автоматического управления по критерию Михайлова.
Для построения годографа Михайлова в характеристическом полиноме замкнутой системы автоматического управления заменим оператор Р на jω. Полученное комплексное число представим в алгебраической форме:
N ( jω) =U (ω) + jV (ω), |
(13) |
N( jω) = 0,18( jω)3 +1,44( jω)2 +7,48 jω +10,8 = |
|
= −0,18 jω3 −1,44ω2 +7,48 jω +10,8 = |
|
=10,8 −1,44ω2 + j(7,48ω −0,18ω3 ) , |
(14) |
U (ω) =10,8 −1,44ω2 , |
(15) |
V(ω) = 7,48ω−0,18ω3 =ω(7,48 −0,18ω2 ) |
(16) |
Заменяя ω числом от 0 до ∞, определим значение функции для построения графика на комплексной плоскости. На первом этапе найдем точки пересечения графика с действительной и мнимой осью.
Точки пересечения с осью jV(ω) можно определить, опираясь на
2 |
10,8 |
|
условие, что U(ω)=0, то есть 10,8-1,44ω =0 → ω − |
1,44 |
= 2,73 . |
V = 7,48 2,73 −0,18 2,733 =16,787 .
Аналогичным образом находим точки пересечения с осью U(ω). V(ω)= 0, т.е. 7,48ω - 0,18ω3 =ω(7,48 −0,18ω2 ) = 0,
ω1=0 7,48 - 0,18ω2=0,
ω2= ±6,44, U1=10,8-1,44•02=10,8,
U2=10,8-1,44•6,442=-49,04
12

Таблица 3 – Данные расчетов для построения годографа Михайлова
ω |
0 |
0, 05 |
0, 1 |
0,15 |
0, 2 |
0, 25 |
0, 3 |
|
U( |
ω |
4,999 |
4, 972 |
4, 906 |
4, 806 |
4,67 |
4, 514 |
4, 332 |
) |
|
|
|
|
|
|
|
|
V( |
ω |
0 |
-0, 28 |
-0, 57 |
-0, 84 |
-1,09 |
-1, 33 |
-1, 547 |
) |
|
|
|
|
|
|
|
|
Рисунок 1 – Годограф Михайлова
По расположению характеристической кривой (рисунок 1) можно сделать вывод: годограф Михайлова для замкнутой системы, представленной уравнением третьего порядка, при изменении частоты ω от 0 до ∞ начинается на положительной вещественной полуоси и, вращаясь против часовой стрелки, проходит последовательно 3 квадранта, поэтому данная система является устойчивой.
По годографу графически определяем критический коэффициент передачи.
13

kmax = S + S0 =10.8 + 49.04 = 59.84,
где S-коэффициент передачи,
S0- коэффициент запаса.
Если значения максимального коэффициента передачи, найденные по критериям Гурвица и Михайлова, совпадают, то исследование системы на устойчивость проведено верно.
3. Определим запас устойчивости разомкнутой системы по фазе. Для этого воспользуемся критерием Найквиста.
Передаточная функция разомкнутой системы имеет вид:
W (P) = |
4.5P + P |
|
0.18P3 +1.44P2 + 2.98P +1.8 . |
(17) |
Заменим оператор Р на jω и выделим действительную и мнимую части.
W ( jω) = |
|
4,5 jω + P |
= |
|
||||
−0,18 jω3 −1,44ω2 +2,98 jω +1,8 |
|
|||||||
|
|
|
|
4,5 jω + P |
|
|
||
= |
|
|
= |
|
|
|
||
1,8 −1,44ω2 − j(0,18ω3 −2,98ω) |
|
|
||||||
= |
|
(4,5 jω + |
9)(1,8 −1,44ω2 ) + j(0,18ω3 −2,98ω) |
= |
||||
(1,8 |
−1,44ω2 )2 +(0,18ω3 −2,98ω)2 |
|
||||||
|
|
|
||||||
|
|
−0,81ω4 +0,45ω2 +16,2 |
|
|
||||
= |
|
|
+ |
|
|
|||
|
0,032ω6 +1,0002ω4 +5,184ω2 +3,24 |
|
|
|||||
+ j |
−4,86ω3 −18,72ω |
0,032ω6 +1,0002ω2 +5,184ω2 +3,24 |
U (ω) = |
|
|
−0,81ω4 +0,45ω2 +16,2 |
; |
|
|
0,032ω6 +1,0002ω4 +5,184ω2 +3,24 |
|
|||
V (ω) = |
j |
−4,86ω3 −18,72ω |
|
. |
|
0,032ω6 +1,0002ω4 +5,184Wω2 +3,24 |
|||||
14

Минимальный угол γ (рисунок 2), образуемый радиусом, проходящим через точку пересечения годографа W(jω) c окружностью радиусом (0-1) с центром в начале координат, и действительной отрицательной полуосью, называют запасом устойчивости по фазе.
Рисунок 2 – Годограф Найквиста
Из годографа видно, что γ=68º.
8 РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ
ФСА дает представление о функционально-блочной структуре системы автоматического управления-регулирования, сигнализации, защиты технологического процесса или установки и определяет объем оснащения установки (объекта) аппаратурой автоматики. На ФСА изображены: технологическое оборудование, коммуникации, органы управления и средства автоматизации (датчики, регулирующие и контролирующие приборы, элементы управления, вычислительные устройства и пр.).
Щиты и пульты изображают прямоугольниками, в зоне которых условно изображают установленные (в щитах, пультах) средства автоматизации. От них идут линии связи к элементам схемы установки. Приборы и средства, установленные вне щитов показывают в прямоугольнике «Приборы местные».
15
9 ИСХОДНЫЕ ДАННЫЕ И ПОСТАНОВКА ЗАДАЧ
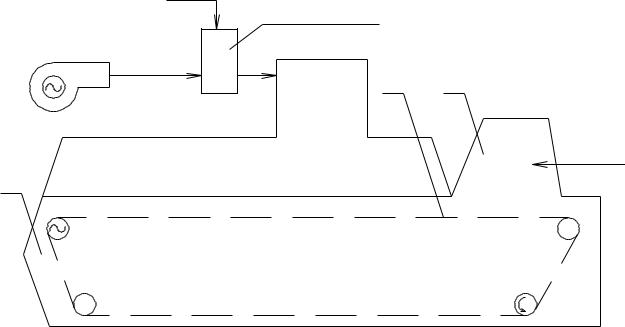
Схема хлебопекарной печи ПХК – 1, (рисунок 3)
где: 1 –пекарная камера; 2 – конвейер; 3 – вентилятор; 4 – топка; 5 – камера увлажнения.
Регулируемый параметр – температура дымовых газов, подаваемых в центральную зону пекарной камеры t0Сп. Максимальное отклонение по кривой разгона t0Смах=120С. Время переходного процесса
в объекте tпер = 20 мин.
Контролируемые параметры на функциональной схеме: температура дымовых газов, давление газа.
В качестве примера исследуем установку технологического процесса хлебопекарной печи ПХК – 1
3
1
газ
|
дымовые газы |
|
воздух |
4 |
5 |
|
2 |
пар
Рисунок 3 – Схема хлебопекарной печи ПХК - 1
Регулируемые параметры: температура дымовых газов, подаваемых в центральную зону пекарной камеры.
Контролируемые параметры: температура; давление газа. Порядок составления функциональной схемы автоматизации
технологической установки (рисунок 4) Составим ФСА ПХК – 1
16

|
|
|
3 |
воздух |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
газ |
|
|
4 |
1 |
|
|
|
|
2 |
|
TE |
|
PE |
|
4-5 |
TE |
1-1 |
|
2-1 |
|
4-1 |
|
|
|
|
ЩИТ
TE |
N |
PE |
PA |
И |
ИS |
N TC |
TE |
1-2 |
2-3 |
2-2 |
2-4 |
3-1 |
3-2 |
4-4 4-3 |
4-2 |
Рисунок 4 – Функциональная схема автоматизации регулирования и контроля температуры и давления газа в ПХК – 1
Для регулирования и контроля температуры и давления газа в технологической установке на выходе из топки установлен измеритель температуры (поз. 4-1), имеющий сдвоенный чувствительный элемент (сдвоенная термопара), один из которых подключен к вторичному прибору, установленному на щите (поз. 4-2), осуществляющий показание и запись температуры, а другой – к электрическому регулятору (поз. 4-3), имеющему датчик (поз. 4-4), не встроенный в регулятор.
Исполнительным механизмом (поз. 4-5) можно управлять вручную с помощью кнопок управления (поз. 4-5) можно управлять вручную с помощью кнопок управления (поз. 3-1) через переключатель режима работы – ручное – автоматическое (поз. 3-2). Исполнительный механизм изменяет подачу газа в топку. Для контроля давления на выходе в топку установлен датчик давления (поз. 2-1), который подключен к вторичному прибору на щите (поз. 2- 2), осуществляющему показание давления газа и имеющему задатчик (поз. 2-3) и сигнализацию (поз. 2-4) для обеспечения техники безопасности.
17
Измеритель температуры подаваемого газа (поз. 1-1) подключен к прибору, установленному на щите (поз. 1-2), осуществляющему показания и запись температуры.
10 ПОСТРОЕНИЕ КРИВОЙ РАЗГОНА ОБЪЕКТА ПО КАНАЛУ РЕГУЛИРОВАНИЯ, ВЫБОР ТИПА РЕГУЛЯТОРА
Исходные данные для построения кривой разгона объекта по каналу регулирования сведены в таблицу 4.
Таблица 4
|
|
|
|
|
|
|
|
|
|
|
|
|
Показатели каче- |
||
|
|
|
|
Относительное время кривой разгона tотн |
|
ства процесса ре- |
|||||||||
№ |
Воздей- |
|
|
|
|
|
|
|
|
|
|
|
гулирования |
||
п/п |
ствие U % |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
|
|
|
Р.О. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
данные эксперимента – отклонение параметра Xэ(t) |
Х1 |
Хост |
tp.отн. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
%Х∞ |
%Х∞ |
|
1 |
10 |
0 |
0,25 |
1 |
2,3 |
3,3 |
4,1 |
4,5 |
4,8 |
5 |
5,1 |
5,1 |
40 |
10 |
1,5 |
2 |
11 |
0 |
0 |
0,4 |
1,3 |
3,3 |
4,4 |
4,8 |
4,9 |
4,9 |
5 |
5 |
65 |
12 |
1,85 |
3 |
12 |
0 |
0 |
0 |
0,15 |
1,3 |
3,3 |
5,5 |
6,6 |
7,1 |
7,4 |
7,5 |
50 |
14 |
2,7 |
4 |
13 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10,1 |
14,5 |
45 |
16 |
1,6 |
5 |
14 |
0 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10 |
78 |
18 |
3 |
6 |
15 |
0 |
0 |
2,2 |
4,6 |
6,6 |
8,2 |
9 |
9,6 |
10 |
10,2 |
10,2 |
42 |
20 |
1,5 |
7 |
16 |
0 |
0,5 |
2 |
4 |
6 |
8 |
10 |
12 |
13 |
14 |
14 |
30 |
22 |
1,8 |
8 |
17 |
0 |
0,5 |
2 |
4 |
7 |
9 |
11 |
13 |
14 |
15 |
15 |
50 |
24 |
1,8 |
9 |
18 |
0 |
0 |
0,4 |
1,3 |
3,3 |
4,4 |
4,8 |
4,9 |
5 |
4.9 |
5 |
80 |
26 |
1,5 |
10 |
19 |
0 |
0 |
0,1 |
0,3 |
1,2 |
2,8 |
3,9 |
4,5 |
4,7 |
4,8 |
4,8 |
80 |
28 |
2 |
11 |
20 |
0 |
0,25 |
1 |
2,3 |
3,3 |
4,1 |
4,5 |
4,8 |
5 |
5,1 |
5,1 |
40 |
30 |
1,5 |
12 |
21 |
0 |
0 |
0,4 |
1,3 |
3,3 |
4,4 |
4,8 |
4,9 |
4,9 |
5 |
5 |
65 |
32 |
1,85 |
13 |
22 |
0 |
0 |
0 |
0,15 |
1,3 |
3,3 |
5,5 |
6,6 |
7,1 |
7,4 |
7,5 |
60 |
34 |
2,7 |
14 |
23 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10,1 |
14,5 |
45 |
36 |
1,6 |
15 |
24 |
0 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10 |
78 |
38 |
3 |
16 |
25 |
0 |
0 |
2,2 |
4,6 |
6,6 |
8,2 |
9 |
9,6 |
10 |
10,2 |
10,2 |
42 |
40 |
1,5 |
17 |
25 |
0 |
0,5 |
2 |
4 |
6 |
8 |
10 |
12 |
13 |
14 |
14 |
30 |
42 |
1,8 |
18 |
26 |
0 |
0,5 |
2 |
4 |
7 |
9 |
11 |
13 |
14 |
15 |
15 |
50 |
44 |
1,8 |
19 |
27 |
0 |
0 |
0,4 |
1,3 |
3,3 |
4,4 |
4,8 |
4,9 |
5 |
4.9 |
5 |
80 |
46 |
1,5 |
20 |
28 |
0 |
0 |
0,1 |
0,3 |
1,2 |
2,8 |
3,9 |
4,5 |
4,7 |
4,8 |
4,8 |
80 |
48 |
2 |
21 |
29 |
0 |
0,25 |
1 |
2,3 |
3,3 |
4,1 |
4,5 |
4,8 |
5 |
5,1 |
5,1 |
40 |
50 |
1,5 |
22 |
30 |
0 |
0 |
0,4 |
1,3 |
3,3 |
4,4 |
4,8 |
4,9 |
4,9 |
5 |
5 |
65 |
52 |
1,85 |
23 |
31 |
0 |
0 |
0 |
0,15 |
1,3 |
3,3 |
5,5 |
6,6 |
7,1 |
7,4 |
7,5 |
60 |
54 |
2,7 |
24 |
32 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10,1 |
14,5 |
45 |
56 |
1,6 |
25 |
33 |
0 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10 |
78 |
58 |
3 |
26 |
34 |
0 |
0 |
2,2 |
4,6 |
6,6 |
8,2 |
9 |
9,6 |
10 |
10,2 |
10,2 |
42 |
60 |
1,5 |
18
Абсолютное значение времени определяется по формуле:
t(M)= tотн tпер , |
(5.1) |
где tпер. – время переходного процесса, указанное для выбранной технологической установки. tпер =12 мин.
Кривую разгона строят в единицах регулируемой величины по формуле:
|
|
X max |
|
|
|
|
|
|
|
X (t ) = X э |
(t) |
|
, |
(5.2) |
|
||||
|
|
X э max |
|
|
где X max = 12 – отклонение по кривой разгона, X max |
= 14 ,5 – откло- |
|||
нение параметра по таблице 1. (Вариант 4). Результаты пересчета t и X сводятся в таблицу 5.
По данным таблицы строится кривая разгона объекта. На кривой разгона объекта проводится касательная к точке перегиба кривой и далее определяются графически динамические и установившиеся
параметры объекта: τ, Т, Х∞. Затем расчитываются вспомогательные
параметры: τ/Т; Х1= Х1(%Х∞)·Х∞/100; Хост= Хост(%Х∞)·Х∞/100; Rg= Х1/ Х∞;
U = U(%Р.О) ·Х∞; k = Х∞/ U/ |
|
|
|
|
|
|
|
|
|
(5.3) |
|||
Таблица 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметр |
|
|
|
|
|
Значение |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tотн |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
|
0,5 |
|
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X э (t) |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
|
9,6 |
|
9,8 |
9,9 |
10 |
10,1 |
14,5 |
t(М) |
0 |
1,2 |
2,4 |
3,6 |
4,8 |
|
6 |
|
7,2 |
8,4 |
9,6 |
10,8 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X(t) |
0,00 |
0,95 |
3,09 |
7,84 |
10,4 |
|
11,4 |
|
11,6 |
11,7 |
11,8 |
12,0 |
12,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По данным таблицы строится кривая разгона объекта (рисунок 5).
19

Tz =4.65 |
=0.5 |
Рисунок 5 – Кривая разгона
Используя формулы (1), (2), (3), находим основные параметры
τ= 0,5 мин,
Т= 4,65 мин,
X∞ = 12.
Затем рассчитываются вспомогательные параметры:
|
τ T = |
|
0 ,5 |
|
|
= 0 ,1 07 ; |
|
|
|||||||||||||
4 ,65 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
X 1 = |
X 1 (% X ∞ ) X ∞ |
= |
45 12 |
= 5 , 4 |
|||||||||||||||||
|
|
|
|
|
100 |
|
|
||||||||||||||
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
X ост. = |
X ост. (%X ∞ ) X ∞ |
|
= |
10 12 |
=1,2 |
||||||||||||||||
|
|
100 |
|
|
|
|
|
|
|
|
|
100 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
R = |
|
X1 |
|
= |
5,4 |
=0,45 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
g |
|
X∞ |
|
12 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
U = U (% |
P .O .) |
|
X ∞ |
= |
|
25 12 |
= |
300 |
|||||||||||||
|
k = |
|
X ∞ |
|
= |
|
12 |
|
|
|
|
= 0 ,04 |
|
|
|
||||||
|
|
U |
|
300 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
20