

Испытания электрогидравлической системы стабилизации (120
..pdfCopyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Московский государственный технический университет имени Н.Э. Баумана
Д.Н. Попов, Г.Е. Лисовский, Н.Г. Сосновский
ИСПЫТАНИЯ
ЭЛЕКТРОГИДРАВЛИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ
Методические указания к выполнению лабораторной работы по дисциплине «Управление техническими системами»
Москва Издательство МГТУ им. Н.Э. Баумана
2010
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
УДК 62-83 ББК 34.447
П58 |
|
|
Рецензент А. Г. Кузнецов |
|
Попов Д. Н. |
П58 |
Испытания электрогидравлической системы стабилизации : |
метод. указания к выполнению лабораторной работы по дисциплине «Управление техническими системами» / Д.Н. Попов, Г.Е. Лисовский, Н.Г. Сосновский. – М. : Изд-во МГТУ им. Н. Э. Баумана, 2010. – 12, [4] с. : ил.
Дано описание экспериментальной установки системы стабилизации угла платформы с гидроприводами. Изложена последовательность проведения испытаний на установке.
Для студентов 4-го курса МГТУ им. Н.Э. Баумана, изучающих дисциплину «Управление техническими системами».
УДК 62-83 ББК 34.447
c МГТУ им. Н.Э. Баумана, 2010
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Цель работы — ознакомить студентов с устройством и принципом действия системы управления, осуществляющей автоматическую стабилизацию угла наклона платформы.
При выполнении лабораторной работы определяется установившаяся ошибка угла наклона платформы в случае гармонического входного воздействия на систему автоматического регулирования. Кроме того, демонстрируется влияние значения коэффициента усиления системы на переходный процесс, вызванный внешним возмущением.
1. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ СТАБИЛИЗАЦИИ
Схема системы приведена на рис. 1. Основными элементами системы являются:
•пульт управления ПУ, предназначенный для формирования задающего и возмущающего воздействий на систему;
•электромагнит изменения плоскости стабилизации ЭИПС,
осуществляющий задающее воздействие на систему;
•гироскопический датчик угла ДУ, выполняющий функции чувствительного элемента и измеряющий рассогласование (ошибку) по углу при стабилизации регулируемого объекта РО относительно заданного положения;
•гироскопический датчик угловой скорости ДУС, служащий в
данной системе корректирующим устройством;
• два вращающихся трансформатора ВТ, один из которых преобразует измеренное датчиком угла ДУ рассогласование по углу в электрическое напряжение, другой создает электрическое напряжение, пропорциональное скорости изменения рассогласования по углу;
3

Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 1. Схема электрогидравлической системы стабилизации:
ПУ – пульт управления; ЭИПС — электромагнит изменения плоскости стабилизации; ДУ — датчик угла гироскопический; ВТ — вращающийся трансформатор; ДУС — датчик угловой скорости гироскопический; ЭУ — электронный усилитель; ЭГУ — электрогидравлический усилитель; ЭМП — электромеханический преобразователь; ГУ — гидравлический усилитель; ГЦ — гидроцилиндр; РО — регулируемый объект; ВГП — вспомогательный гидропривод
•электронный усилитель ЭУ, который суммирует и усиливает сигналы, поступающие от ВТ;
•электромеханический преобразователь ЭМП, управляющий гидравлическим усилителем ГУ, дроссельное распределительное устройство которого, в свою очередь, управляет движением выходного звена гидроцилиндра ГЦ;
•вспомогательный гидропривод ВГП, с помощью которого создается гармоническое воздействие на регулируемый объект РО.
Регулируемый объект представляет собой платформу, положение которой должно быть стабилизировано в горизонтальной плоскости.
Система стабилизации работает следующим образом. При отклонении платформы от плоскости стабилизации на угол δ, значение которого определяется мгновенными значениями углов, задаваемых вспомогательным гидроприводом и гидроцилиндром, во вторичной обмотке вращающегося трансформатора датчика угла возникает напряжение, пропорциональное углу δ. Во вторичной обмотке вращающегося трансформатора датчика угловой скорости возникает напряжение, пропорциональное скорости dδ/dt отклонения платформы от заданного положения, а фаза зависит от направления отклонения. Если платформа удаляется от заданной
4
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
плоскости стабилизации, то сигналы обоих вращающихся трансформаторов совпадают по фазе и суммируются. При приближении платформы к плоскости стабилизации фаза сигнала вращающегося трансформатора датчика угловой скорости противоположна фазе сигнала вращающегося трансформатора датчика угла, и сигналы вычитаются. Это алгебраическое суммирование сигналов происходит на входе в электронный усилитель, с выхода которого усиленный сигнал в виде электрического тока i поступает в обмотку управления электромеханического преобразователя, вызывая поворот его якоря. Вместе с якорем электромеханического преобразователя поворачивается заслонка, при помощи которой регулируется давление, управляющее дроссельным распределительным устройством гидроусилителя. Вследствие перемещения элементов этого устройства одна полость гидроцилиндра сообщается с линией высокого давления, а другая — с линией низкого давления. Под действием возникшей в полостях гидроцилиндра разности давлений его поршень перемещается так, что связанная с ним платформа будет приближаться к заданной плоскости стабилизации. При этом угол рассогласования δ будет уменьшаться.
Для изменения положения плоскости стабилизации необходимо повернуть ручку потенциометра, расположенную на пульте управления. Сопротивление цепи электромагнита изменения плоскости стабилизации изменится, и на его якоре возникнет крутящий момент, который будет действовать на внутреннюю рамку гироскопа датчика угла, вызывая вращение внешней рамки и связанного с ней ротора вращающегося трансформатора датчика угла. Дополнительный сигнал, поступающий от вращающегося трансформатора, вызовет движение поршня гидроцилиндра и поворот платформы. После установки платформы в новое заданное положение (после установки новой плоскости стабилизации) ручка потенциометра возвращается в нейтральное положение.
Коэффициент усиления системы стабилизации может быть изменен регулированием коэффициента усиления электронного усилителя.
Конструктивно элементы ЭИПС, ДУ, ДУС и ВТ могут объединяться в один блок гироскопических датчиков. Элементы ЭМП и ГУ образуют ЭГУ, а ГЦ является исполнительным элементом системы.
5

Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
2. СТЕНД ДЛЯ ИСПЫТАНИЙ СИСТЕМЫ СТАБИЛИЗАЦИИ
Общий вид стенда показан на рис. 2. Платформа (регулируемый объект) 1 и качающаяся опора 5 гидроцилиндра 7 на подшипниках качения установлены на одной горизонтальной оси, закрепленной в станине 8. Качающаяся опора при помощи тяги соединена с выходным звеном вспомогательного гидропривода 9. Во время испытаний вспомогательный гидропривод 9 работает в режиме вынужденных колебаний, обеспечивая тем самым колебания опоры 5. Стабилизация положения платформы 1 осуществляется гидроцилиндром 7, перемещением штока которого управляет блок гироскопических датчиков 11, закрепленный на платформе 1. Для измерения отклонения платформы от заданного положения используется датчик 6, а для определения амплитуды качания опоры 5 служит датчик 10. Датчики 10 и 6 являются датчиками индуктивного типа и входят в комплект аппаратуры ВИ6-5МАД.
Каждый из таких датчиков имеет цилиндрический корпус, в котором размещается катушка с первичной и вторичными обмот-
Рис. 2. Стенд для испытания системы стабилизации:
1 – платформа; 2 – электрическая лампа; 3 – оптическое устройство; 4 – экран; 5 – опора; 6 – датчик; 7 – гидроцилиндр; 8 – станина; 9 – вспомогательный гидропривод; 10 – датчик; 11 – гироскопический датчик
6
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
ками. Внутрь катушки входит стальной стержень. Датчик крепится так, чтобы его стержень занимал симметричное относительно обмоток положение. При смещениях стержня относительно корпуса датчика на его выходе изменяется электрический сигнал, который в пределах линейного участка работы датчика пропорционален перемещению платформы 1 или опоры 5. Первичная обмотка датчика питается от специального генератора с несущей частотой 6 кГц. Наводимые во вторичных обмотках токи выпрямляются, и их разность через специальный фильтр и усилитель поступает на вход регистрирующей аппаратуры (светолучевой осциллограф, графопостроитель, компьютер).
Чтобы непосредственно наблюдать за отклонением платформы от заданного положения, на ней закреплена электрическая лампа 2, свет которой после прохождения через оптическое устройство 3 в виде узкой полоски направляется на экран 4. На экране имеется горизонтальная черта, нанесенная соответственно заданному положению платформы. По смещению полоски света от горизонтальной черты определяется отклонение платформы.
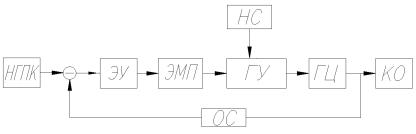
Вспомогательный гидропривод представляет собой автономный электрогидравлический следящий привод. Схема этого привода изображена на рис. 3. Привод ВГП состоит из электромеханического преобразователя ЭМП, двухкаскадного гидроусилителя ГУ, исполнительного гидроцилиндра ГЦ и потенциометрической обратной связи ОС. Питание гидроусилителя жидкостью под давлением осуществляется от насосной станции НС, смонтированной в одном корпусе с другими элементами привода. Выходное звено гидроцилиндра связано с качающейся опорой КО стенда. Входные сигналы создаются электронным низкочастотным генератором периодических колебаний НГПК.
Низкочастотный генератор периодических колебаний позволяет получить электрические колебания низкой частоты различных форм: прямоугольной, пилообразной, треугольной и синусоидальной. Частота колебаний может устанавливаться в диапазоне 0,001. . . 100 Гц. Максимальная амплитуда напряжения равна 10 В.
При работе стенда электрические сигналы с НГПК и ОС поступают на вход ЭУ, к выходу которого подключены обмотки ЭМП вспомогательного гидропривода; ЭМП управляет движением распределительного золотника ГУ, который сообщает одну полость
7
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 3. Схема вспомогательного гидропривода:
НГПК — низкочастотный генератор периодических колебаний; ЭУ — электронный усилитель; ЭМП — электромеханический преобразователь; НС — насосная станция; ГУ — гидроусилитель; ГЦ — гидроцилиндр; КО — качающаяся опора; ОС — обратная связь
ГЦ с линией нагнетания НС, а другую с линией слива. Вследствие этого возникает перепад давления между полостями ГЦ, который будет периодически изменяться в связи с тем, что происходят колебания электрического тока на входе ЭМП. Под действием периодически изменяющегося перепада давления поршень ГЦ вместе с его выходным звеном и КО совершают колебания, близкие к гармоническим. Такой закон колебаний выходного звена гидропривода при гармоническом входном сигнале (при гармонических колебаниях электрического тока, создаваемых НГПК) обеспечивается ОС. Частота пропускания сигналов для этого привода ограничена 2 Гц, поэтому при испытаниях не следует устанавливать большие значения частот, производя настройку НГПК. Нижний предел диапазона рабочих частот определяется плавностью движения выходного звена привода и составляет около 0,1 Гц.
Во время испытаний аппаратура ВИ6-5МАД вместе с датчиком Доп (измеряет перемещение качающейся опоры) и датчиком Дпл (измеряет перемещение платформы) подключается к регистрирующей аппаратуре (рис. 4).
Регистрирующая аппаратура должна иметь два независимых канала для определения зависимости одной измеряемой величины от другой (угла наклона платформы стабилизации от угла поворота качающейся опоры).
8

Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 4. Схема подключения регистрирующей аппаратуры ВИ6-5МАД:
Доп — датчик, измеряющий перемещение качающейся опоры; Дпл —датчик, измеряющий перемещение платформы
3. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
Перед началом работы необходимо ознакомиться с инструкцией по технике безопасности.
Для подготовки системы стабилизации к испытаниям производится включение отдельных ее элементов и аппаратуры стенда в указанной ниже последовательности.
I. Включение электрического питания стенда.
1.Включить электродвигатель генератора постоянного тока.
2.С помощью реостата установить напряжение 27 В.
II. Включение аппаратуры стенда.
1.К распределительному щиту с напряжением 220 В подключить приборы Б5-44, ВС-26 и регистрирующую аппаратуру ВИ6-5МАД (от ВС-26 подается напряжение 27 В на аппаратуру ВИ6-5МАД и оптическое устройство) (см. рис. 4).
2.На панели блока питания аппаратуры ВИ6-5МАД включить тумблер питания «27 В».
3.На пульте управления стендом (см. рис. 2):
а) включить тумблер «Свет»; после этого платформу установить вручную так, чтобы полоска света совпадала с чертой на экране, соответствующей среднему положению платформы;
9
Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
б) последовательно включить тумблеры «Гироблок», «Гидросистема стабилизации», «Арретирование».
После включения перечисленных в п. 3, б тумблеров необходимо подождать 2 мин, чтобы дать возможность раскрутиться гироскопам, затем при помощи потенциометра управления произвести корректирование положения платформы по полоске света и черте на экране.
III. Проведение испытаний.
1.На пульте управления стендом включить тумблер «ВГП» (см. рис. 2).
2.По миллиамперметру аппаратуры ВИ6-5MAД проверить
диапазон работы датчика Доп; стрелка миллиамперметра должна колебаться в пределах ± 1 мА (см. рис. 4).
3.Запись первой характеристики провести при частоте 0,3 Гц, которая предварительно задается настройкой НГПК (см. рис. 3), затем записать характеристики при частотах 0,6; 1,0; 1,5; 2,0 Гц.
4.Для демонстрации влияния значения коэффициента усиления системы на переходный процесс изменить настройку ЭУ; при этом по экрану определить отклонение полоски света, которое соответствует амплитуде колебаний платформы (см. рис. 3).
5.Окончив испытания, выключить на пульте управления тумблеры «ВГП», «Гироблок», «Гидросистема стабилизации», «Арретирование»; после этого выключить питание НГПК (см. рис. 3). Аппаратура ВИ6-5МАД и регистрирующая аппаратура не отключаются, так как они используются при тарировке датчика пе-
ремещения Дпл, которая выполняется в такой последовательности (см. рис. 2):
а) платформу 1 установить вручную так, чтобы полоска света совпадала с чертой на экране 4, соответствующей среднему положению платформы. При этом зафиксировать сигнал регистрирующей аппаратуры; б) платформу 1 сместить так, чтобы полоска света на экране сместилась на 2 мм и вновь зафиксировать сигнал регистрирующей аппаратуры. Таким образом фиксируются несколько положений полоски света на экране, отличающихся друг от друга на 2 мм;
в) по результатам измерений построить тарировочный график.
10